一种基于BIM技术的操作行为警示系统的制作方法
本发明涉及建筑安全,尤其涉及一种基于bim技术的操作行为警示系统。
背景技术:
1、bim,即建筑信息模型,不是简单的将数字信息进行集成,而是一种数字信息的应用,并可以用于设计、建造、管理的数字化方法;建筑信息模型是以建筑工程项目的各项相关信息数据作为基础,通过数字信息仿真模拟建筑物所具有的真实信息,通过三维建筑模型,实现工程监理、物业管理、设备管理、数字化加工、工程化管理等功能,它具有信息完备性、信息关联性、信息一致性、可视化、协调性、模拟性、优化性和可出图性八大特点;它利于项目可视化、精细化建造;建筑施工行业由于其自身特性,一直是安全事故频发的行业,造成的损失巨大,由于工程建设场地固定且有限,若建筑规模庞大,或进行多种复杂的施工活动,易发生物体打击、碰撞、高空坠落等安全事故,若建设项目活动是露天作业,现场环境受气象条件和地理环境的影响,增加了发生安全事故的概率,同时,建筑行业手工操作多,作业人员整体素质较低且流动性大,若作业人员或管理人员抱有侥幸心理,更容易导致安全事故。
2、中国专利公开号:cn109330189a,公开了一种智能建筑运维管理平台,设计了警示组件,通过上升和发光的方式进行警示,而且设计在重点观察区,可以对使用者起到有效的警示效果;由此可见,现有的建筑安全技术的警示系统,缺少通过bim技术的数字化加工,通过模型中的移动目标与实体的相对距离数据对移动目标进行实时监控,根据实体模型与移动目标模型的位置关系预测移动目标是否与被标记实体发生碰撞,并在判定移动目标若持续当前行进状态将会与周围实体发生碰撞时,进行警示提示的功能。
技术实现思路
1、为此,本发明提供一种基于bim技术的操作行为警示系统,用以克服现有技术中不能根据实时追踪的移动目标与周围标记实体的位置关系确定是否警示提示的问题。
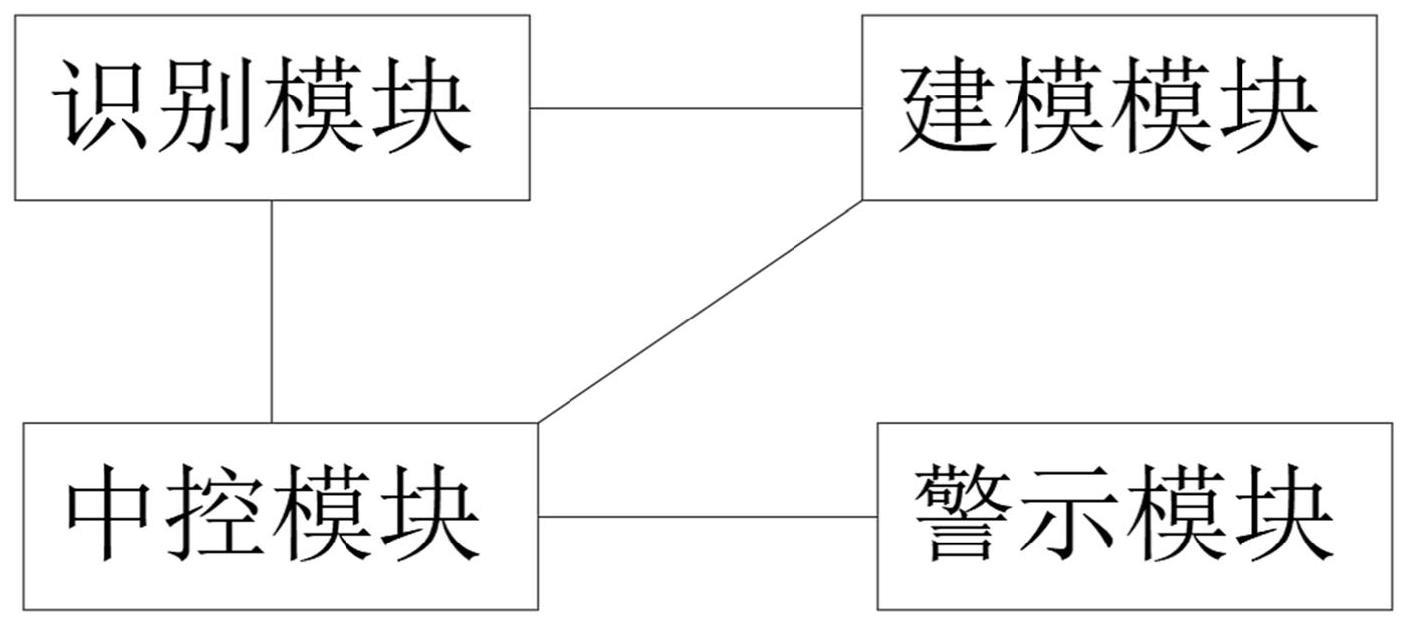
2、为实现上述目的,本发明提供一种基于bim技术的操作行为警示系统,包括,
3、识别模块,其内设置有摄像装置,所述摄像装置用以采集建筑物内部的实时行为图像,并追踪建筑物内部的移动目标,所述识别模块用以根据所述实时行为图像对移动目标以及移动目标存在的区域进行识别;
4、建模模块,用以创建建筑物框体模型、建筑物框体模型内部的若干分区模型、任一所述分区模型与对应的移动目标模型组成的待警示监测模型、任一所述分区模型的若干实体模型以及若干标记实体模型;
5、中控模块,其与所述识别模块以及所述建模模块相连;所述中控模块能够在所述识别模块追踪移动目标的过程中获取移动目标的实时移动速度,并根据实时移动速度调整标准警示距离;所述中控模块能够在预设检测区域内根据移动目标模型的运动缓冲区范围与当前标记实体模型的静止缓冲区范围确定实时警示距离,根据当前标记实体模型与移动目标模型的位置关系确定移动目标的实时偏移角度,并根据标准警示距离以及避碰偏移角度实时判定移动目标与周围标记实体的实时偏移角度、实时警示距离,以确定移动目标是否能够避开当前标记实体;
6、警示模块,其与所述中控模块相连,用以在所述中控模块判定移动目标不能避开当前标记实体时,向外部管理端发送警示信号。
7、进一步地,所述识别模块能够获取所述摄像装置采集的建筑物内部的实时行为图像,根据实时行为图像确定移动目标以及移动目标所在区域,并对移动目标进行识别,同时所述中控模块能够在实时行为图像中对移动目标所在区域进行标记,并将标记的移动目标所在区域与所述分区模型进行匹配,所述建模模块将创建由移动目标模型与移动目标匹配的分区模型组成的待警示监测模型。
8、进一步地,所述中控模块内设置有移动目标的第一预设角度以及预设监测距离,在所述识别模块追踪移动目标的过程中,所述中控模块获取移动目标以及移动目标所在区域的上投影的实时行为图像,将移动目标以实时移动方向出发的最前端作为顶点,将实时移动方向所在的直线作为轴线,将第一预设角度作为偏转角,构建三角形封闭区域作为预设监测区域;
9、其中,三角形封闭区域的高为在轴线上且与顶点相距为预设监测距离的线段,将顶点处向轴线两侧以偏转角为夹角引出的两条射线,与在高的另一个端点处引出的与轴线垂直的射线相交,以确定出三角形区域,并将三角形内部区域作为三角形封闭区域。
10、进一步地,所述中控模块内设置有第一移动速度v1、第二移动速度v2以及标准警示距离lb,在所述识别模块追踪移动目标的过程中,所述中控模块根据实时行为图像与预设监测模型中移动目标模型的位置计算移动目标的实时移动速度vs,并根据第一移动速度与第二移动速度对实时移动速度进行判定,
11、若实时移动速度小于第一移动速度,所述中控模块将标准警示距离调整为lb’=lb×[1+(v1-vs)/vs];
12、若实时移动速度在第一移动速度与第二移动速度之间,所述中控模块不对标准警示距离进行调整,输出标准警示距离lb’=lb;
13、若实时移动速度大于第二移动速度,所述中控模块将标准警示距离调整为lb’=lb×[1-(v1-vs)/vs]。
14、进一步地,所述中控模块在根据标准移动速度对实时移动速度进行判定后,能够根据移动目标的实时移动速度调整标准警示距离,根据所述建模模块创建的若干标记实体模型与预设监测区域的位置关系确定若干实时监测距离,并根据标准警示距离对任一实时监测距离进行判定,
15、若存在实时监测距离小于等于标准警示距离,所述中控模块将获取移动目标模型与对应的标记实体模型的位置关系,并对移动目标的实时移动方向进行判定,以确定移动目标是否能够避开当前标记实体;
16、若不存在实时监测距离小于等于标准警示距离,所述识别模块继续对移动目标进行追踪。
17、进一步地,所述中控模块内设置有第一预设半径,所述中控模块能够根据所述建模模块创建的任一标记实体模型以及第一预设半径确定任一标记实体模型的静止缓冲区范围,根据移动目标以及第一预设半径确定移动目标模型的运动缓冲区范围,获取静止缓冲区范围的静止边缘轮廓、运动缓冲区范围的运动边缘轮廓以及预设监测区域的检测边缘轮廓,将静止边缘轮廓与检测边缘轮廓相距最近的距离作为实时监测距离,将运动边缘轮廓与静止边缘轮廓相距最近的距离作为实时警示距离;
18、其中,静止缓冲区范围表示全部距标记实体模型oi的距离d小于等于第一预设半径r的点的集合,运动缓冲区范围表示全部距移动目标模型qi的距离d小于等于第一预设半径r的点的集合;
19、bi={x:d(x,oi)≤r},qi={x:d(x,qi)≤r},bi表示静止缓冲区范围,qi表示运动缓冲区范围,oi表示标记实体模型,qi表示移动目标模型,r表示第一预设半径。
20、进一步地,所述中控模块在判定存在实时监测距离小于等于标准警示距离时,所述识别模块持续追踪移动目标,所述中控模块能够获取移动目标的实时移动方向,并对实时移动方向进行判定,
21、若实时移动方向开始偏移,所述中控模块将根据移动目标模型与当前标记实体模型的避碰偏移角度对实时偏移角度进行判定,以确定移动目标是否能够避开当前标记实体模型;
22、若实时移动方向未出现偏移,所述中控模块将根据标准警示距离对实时警示距离进行判定,以确定移动目标的当前移动方向是否能够避开当前标记实体。
23、进一步地,所述中控模块在判定移动目标的实时移动方向开始偏移时,将移动目标行驶的最前端作为起点,将移动目标的实时移动方向所在的直线作为轴线,通过起点向当前标记实体模型的静止边缘轮廓引出两条切线,获取任一切线与轴线的夹角作为移动目标与当前标记实体的避碰偏移角度,获取移动目标模型的实时移动方向与轴线的夹角作为实时偏移角度,并根据避碰偏移角度对实时偏移角度进行判定,
24、若实时偏移角度小于避碰偏移角度,所述中控模块将根据标准警示距离对实时警示距离进行判定,以确定移动目标的当前移动方向是否能够避开当前标记实体;
25、若实时偏移角度大于等于避碰偏移角度,所述中控模块判定移动目标已避碰当前标记实体,将对下一标记实体进行判定。
26、进一步地,所述中控模块在判定实时监测距离小于等于标准警示距离且实时移动方向未出现偏移或实时偏移角度小于避碰偏移角度时,获取标准警示距离以及运动缓冲区范围与静止缓冲区范围间的实时警示距离,根据标准警示距离对实时警示距离进行判定,
27、若实时警示距离小于等于标准警示距离,所述中控模块将通过所述警示模块向外部管理端发送警示信号;
28、若实时警示距离大于标准警示距离,所述中控模块不控制所述警示模块向外部管理端发送警示信号。
29、进一步地,所述中控模块根据实时行为图像与预设监测模型中移动目标模型的位置计算移动目标的实时移动速度vs时,获取所述识别单元采集的连续相邻图像的时间间隔δt,获取所述预设监测模型中对应的移动目标的实际位移δs,计算移动目标的实时移动速度vs=δs/δt。
30、与现有技术相比,本发明的有益效果在于,通过设置有摄像装置,以对建筑物内部进行监控,通过设置识别模块,以对建筑物内部的移动目标进行识别与跟踪,通过设置建模模块,以对建筑物内部的各个实体进行建模生成实体模型并对建筑物内部进行分区生成分区模型,通过中控模块根据移动目标建立预设检测区域,并在预设检测区域内,根据移动目标的运动缓冲区范围与当前标记实体模型的静止缓冲区范围确定实时警示距离,根据当前标记实体模型与移动目标的位置关系确定移动目标的实时偏移角度,并根据标准警示距离以及避碰偏移角度实时判定移动目标与周围标记实体模型的实时偏移角度、实时警示距离,以确定移动目标是否能够避开当前标记实体模型,并在判定移动目标不能够避开当前标记实体模型时,通过警示模块向外部管理端发送警示信号。
31、进一步地,通过识别模块将实时行为图像结果实时反馈至建模单元,建模模块根据中控模块标记的区域确定分区模型,以锁定区域实现精准定位,建模模块根据实时行为图像创建待警示监测模型,从而精准确定移动目标与实体的位置数据,中控模块将根据该位置数据进行计算并判定。
32、进一步地,第一预设角度表示设定的以移动目标的实时移动方向所在的直线为轴进行旋转的角度,根据建筑物的空间结构、实体构造对应设定,一般也与操作人员的水平视野范围有关,应该大于操作人员的水平视野范围,以在操作人员视野盲区也能够进行监测;预设监测距离表示以移动目标为原点,在移动目标的实时移动方向上的延伸距离,一般根据建筑物的空间结构、实体构造对应设定,一般也与操作人员的纵深视野范围,即分辨物体的远近范围有关,应该大于操作人员的纵深视野范围,以在操作人员视野盲区也能够进行监测;通过设置第一预设角度、预设监测距离以及移动目标在建筑物内部的实时位置,构成了预设监测区域,锁定监测范围,保障中控模块精准判定是否进行警示提示。
33、尤其,标准警示距离表示设定的移动目标与标记实体的相对距离,若移动目标处于此位置,表示移动目标若继续以当前速度和方向行进,将与实体发生碰撞;通过设置第一移动速度、第二移动速度以及标准警示距离,使中控模块将第一移动速度与第二移动速度与实时移动速度进行对比,以判定是否调整标准警示距离,若中控模块判定实时移动速度小于第一移动速度,表示移动目标运动速度相较于设定值较小,刹车时具有的动能相对较小,即制动距离较小,因此调小标准警示距离,若中控模块判定实时移动速度在第一移动速度与第二移动速度之间,表示移动目标运动速度在设定值范围内,标准警示距离也为设定值不变,若中控模块判定实时移动速度大于第二移动速度,表示移动目标运动速度相较于设定值增大,制动距离随之增大,因此调大标准警示距离,保障中控模块判定精准。
34、进一步地,实时监测距离表示预设监测区域的边缘与任一标记实体的实际距离,通过识别模块将识别结果,即移动目标与若干实体的相对位置,实时反馈至建模单元,建模单元确定移动目标与对应实体的位置数据,中控模块根据由移动目标构成的预设监测区域与建模单元确定的移动目标与对应实体的位置数据,得出实时监测距离;标记实体模型表示建筑物中具有一定危险性或特殊性的物体因此不能与其发生碰撞或靠近。
35、进一步地,通过中控模块将实时监测距离与标准警示距离进行对比,以锁定与移动目标相距较近的被标记的实体,进而预测移动目标是否与其发生碰撞,若中控模块判定存在实时监测距离小于等于标准警示距离,表示移动目标与该标记实体相距较近,因此具有碰撞风险,需锁定该标记实体,将根据移动目标的方向判定移动目标是否能避免与其发生碰撞,若中控模块判定不存在实时监测距离小于等于标准警示距离,表示预设监测区域未出现被标记的实体,当前状态无碰撞风险。
36、尤其,第一预设半径表示设定的危险范围,即若移动目标移动在此范围内会与实体发生碰撞,设定值与实体本身的构造特点、性质有关,也与移动目标的特性有关,例如,当移动目标是建筑物内的行车时,此时第一预设半径与此行车的结构、型号有关;通过设置第一预设半径,构成实体的静止缓冲区范围以及移动目标的运动缓冲区范围,当静止缓冲区范围的边缘轮廓与运动缓冲区范围的边缘轮廓外切时,移动目标与该实体保持在安全距离范围,即不会发生碰撞。
37、进一步地,通过中控模块在判定存在实时监测距离小于等于标准警示距离时,锁定该实体,继续判定移动目标与该实体的位置关系,若中控模块判定实时移动方向开始偏移,表示移动目标转向,将根据转向角度判定移动目标是否能避开该实体,若中控模块判定实时移动方向未出现偏移,表示移动目标目前处于原始方向状态,将对移动目标与实体的实际距离进行判定。
38、尤其,通过中控模块在判定移动目标的实时移动方向开始偏移时,获取移动目标与当前标记实体模型的静止缓冲区范围的边缘轮廓,静止缓冲区范围的边缘轮廓为圆形,将移动目标的偏移位点作为始点,则移动目标避免碰撞的最优方向为其与圆的切线方向,若中控模块判定实时偏移角度小于避碰偏移角度,表示若维持当前偏移后的方向继续行进,不足以避免与该实体碰撞,将继续判定移动目标与该实体的实际距离,若中控模块判定实时偏移角度大于等于避碰偏移角度,表示移动目标的转向已避开该实体。
39、进一步地,通过中控模块在判定实时监测距离小于等于标准警示距离且实时移动方向未出现偏移或实时偏移角度小于避碰偏移角度时,即移动目标的运动状态为与该标记实体的距离越来越近,若中控模块判定实时警示距离小于等于标准警示距离,表示移动目标与该标记实体的距离很近,若不转向或停止,将会发生碰撞,则通过警示模块向外部管理端发送警示信号,若中控模块判定实时警示距离大于标准警示距离,表示移动目标还可以通过转向而与该标记实体避免发生碰撞。
40、进一步地,通过识别模块与建模模块联动,即当识别模块将图像识别结果实时反馈至建模模块时,建模模块实时更新移动目标与实体模型的位置数据,中控模块计算移动目标的实时移动速度,方法简便有效。
- 还没有人留言评论。精彩留言会获得点赞!