一种基于信创架构下的远程自动化运维管理方法及系统与流程
本发明涉及远程自动化,具体涉及一种基于信创架构下的远程自动化运维管理方法及系统。
背景技术:
1、自动化,指机器设备、系统或过程(生产、管理过程)在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。
2、随着计算机和通信技术的发展,远程自动化具有很大的前景,是信息时代的必然产物。
3、信创架构,是一种基于云计算、大数据、人工智能等新一代信息技术的架构,它是一种面向未来的技术参考模型,可以帮助企业构建高效、灵活、可靠的信息系统。
4、现有的自动化技术,基本上都是加工过程中的部分自动化,还需要人工进行加工的操作与干预。在对设计件的加工过程中,需要工作人员手动对设计件进行三维体的剔除与排布调整,并参与自动化切割运行过程,进行人工维护监测和手动维护调整,无法实现高效的基于信创架构下的远程自动化运维管理。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于信创架构下的远程自动化运维管理方法及系统,解决了现有技术中,自动化程度不高,需要工作人员手动对设计件进行三维体的剔除与排布调整,并需要人工参与自动化切割运行过程,进行人工维护监测和手动维护调整,无法实现高效的基于信创架构下的远程自动化运维管理的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、一种基于信创架构下的远程自动化运维管理方法,该方法包括:
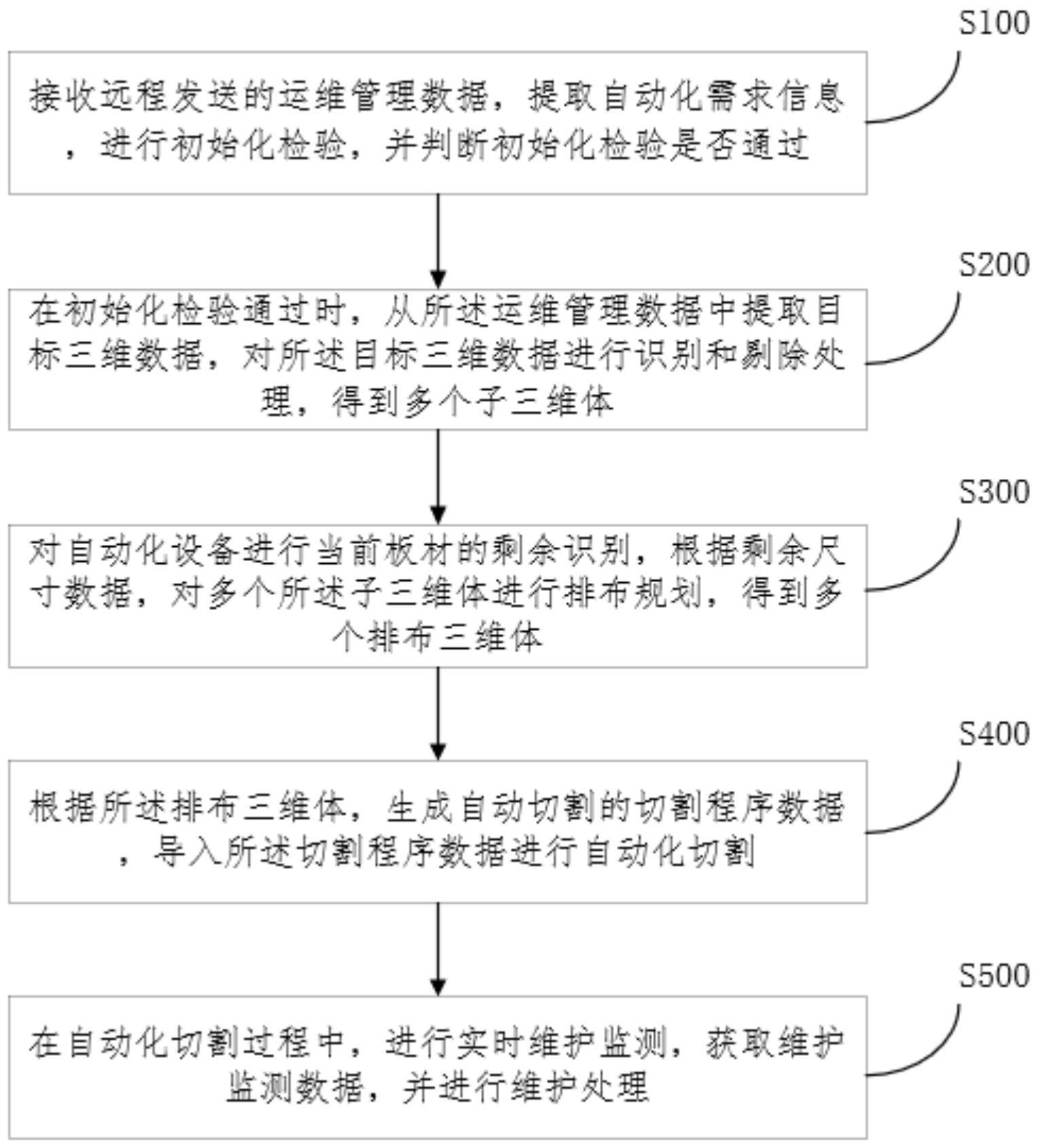
6、接收远程发送的运维管理数据,提取自动化需求信息,进行初始化检验,并判断初始化检验是否通过;
7、在初始化检验通过时,从所述运维管理数据中提取目标三维数据,对所述目标三维数据进行识别和剔除处理,得到多个子三维体;
8、对自动化设备进行当前板材的剩余识别,根据剩余尺寸数据,对多个所述子三维体进行排布规划,得到多个排布三维体;
9、根据所述排布三维体,生成自动切割的切割程序数据,导入所述切割程序数据进行自动化切割;
10、在自动化切割过程中,进行实时维护监测,获取维护监测数据,并进行维护处理。
11、作为本发明实施例技术方案进一步的限定,所述接收远程发送的运维管理数据,提取自动化需求信息,进行初始化检验,并判断初始化检验是否通过具体包括:
12、接收远程发送的运维管理数据;
13、从所述运维管理数据中提取自动化需求信息;
14、按照预设的自动化运行数据,对所述自动化需求信息进行条件匹配,生成条件匹配结果;
15、根据所述条件匹配结果,进行初始化检验,并判断初始化检验是否通过。
16、作为本发明实施例技术方案进一步的限定,所述在初始化检验通过时,从所述运维管理数据中提取目标三维数据,对所述目标三维数据进行识别和剔除处理,得到多个子三维体具体包括:
17、在初始化检验通过时,生成运行处理指令;
18、按照所述运行处理指令,从所述运维管理数据中提取目标三维数据;
19、对所述目标三维数据进行三维转化,生成目标三维模型;
20、对所述目标三维模型进行识别和剔除处理,得到多个子三维体。
21、作为本发明实施例技术方案进一步的限定,所述对所述目标三维模型进行识别和剔除处理,得到多个子三维体具体包括:
22、对所述目标三维模型进行爆炸化处理,得到多个分解三维体;
23、对多个所述分解三维体进行标准件识别与标记,生成识别标记信息;
24、按照所述识别标记信息,对多个分解三维体进行标准件剔除,得到多个子三维体。
25、作为本发明实施例技术方案进一步的限定,所述对自动化设备进行当前板材的剩余识别,根据剩余尺寸数据,对多个所述子三维体进行排布规划,得到多个排布三维体具体包括:
26、对自动化设备进行当前板材的双目拍摄,获取双目拍摄数据;
27、按照所述双目拍摄数据进行剩余识别,得到剩余尺寸数据;
28、根据所述剩余尺寸数据,对多个所述子三维体进行排布规划,得到多个排布三维体。
29、作为本发明实施例技术方案进一步的限定,所述根据所述剩余尺寸数据,对多个所述子三维体进行排布规划,得到多个排布三维体具体包括:
30、获取多个所述子三维体的厚度和最小角度;
31、按照所述厚度和所述最小角度进行钻刀匹配,得到钻刀数据;
32、根据所述钻刀数据,确定排布边界尺寸;
33、根据所述剩余尺寸数据,按照所述排布边界尺寸,对多个所述子三维体进行排布规划,得到多个排布三维体。
34、作为本发明实施例技术方案进一步的限定,所述根据所述排布三维体,生成自动切割的切割程序数据,导入所述切割程序数据进行自动化切割具体包括:
35、对所述排布三维体进行切割仿真,并判断是否正确切割;
36、若正确切割,则生成自动切割的切割程序数据;
37、导入所述切割程序数据,进行自动化切割控制管理。
38、作为本发明实施例技术方案进一步的限定,所述在自动化切割过程中,进行实时维护监测,获取维护监测数据,并进行维护处理具体包括:
39、在自动化切割过程中,进行回刀监测,判断是否回刀;
40、在回刀时,生成维护指令;
41、根据所述维护指令,暂停自动化切割;
42、根据所述维护指令,进行吸尘维护。
43、一种基于信创架构下的远程自动化运维管理系统,该系统包括:
44、远程数据处理模块,用于接收远程发送的运维管理数据,提取自动化需求信息,进行初始化检验,并判断初始化检验是否通过;
45、三维识别剔除模块,用于在初始化检验通过时,从所述运维管理数据中提取目标三维数据,对所述目标三维数据进行识别和剔除处理,得到多个子三维体;
46、三维排布规划模块,用于对自动化设备进行当前板材的剩余识别,根据剩余尺寸数据,对多个所述子三维体进行排布规划,得到多个排布三维体;
47、切割程序生成模块,用于根据所述排布三维体,生成自动切割的切割程序数据,导入所述切割程序数据进行自动化切割;
48、实时维护处理模块,用于在自动化切割过程中,进行实时维护监测,获取维护监测数据,并进行维护处理。
49、作为本发明实施例技术方案进一步的限定,所述三维识别剔除模块包括:
50、指令生成单元,用于在初始化检验通过时,生成运行处理指令;
51、三维数据提取单元,用于按照所述运行处理指令,从所述运维管理数据中提取目标三维数据;
52、三维模型生成单元,用于对所述目标三维数据进行三维转化,生成目标三维模型;
53、三维识别剔除单元,用于对所述目标三维模型进行识别和剔除处理,得到多个子三维体。
54、(三)有益效果
55、本发明提供了一种基于信创架构下的远程自动化运维管理方法及系统。与现有技术相比,具备以下有益效果:
56、(1)本发明能够在接收远程发送的运维管理数据之后,进行三维数据的自动识别和剔除处理,并进行当前板材的剩余识别,对多个子三维体进行排布规划,生成切割程序数据,进而进行自动化切割,且进行实时维护监测和对应的维护处理,从而实现高效的基于信创架构下的远程自动化运维管理;
57、(2)本发明能够提取运维管理数据中的自动化需求信息,进行初始化检验,并在初始化检验通过之后,才进行后续的自动化处理,避免自动化需求不完全满足自动化运行条件,而造成自动化处理过程烂尾的问题;
58、(3)本发明能够按照自动化设备的当前板材的剩余尺寸数据,对多个子三维体进行排布规划,实现对板材的最大化利用,能够有效避免板材浪费的问题。
- 还没有人留言评论。精彩留言会获得点赞!