一种全自动相机内参标定方法、装置、电子设备和介质与流程
本公开涉及相机,尤其涉及一种全自动相机内参标定方法、装置、电子设备和介质。
背景技术:
1、在单目视觉系统中,最重要的参数之一是相机的内参坐标,它反映了环境信息到图像信息之间的映射关系,一个精确的内参系数是通过单目相机对观景进行观测和测量的首要保证,相机内参系统与相机感光片位置,镜头位置等有关系,虽然在制作相机时可以生产指定标准的元器件并按照指定的尺寸装配摄像头,通过这些标准可以计算出摄像头的内参,但不幸的是,由于工艺水平有限,元器件尺寸与标准值存在误差,同时装配位置也会与期望值存在偏差,使得真是的内参系数与理论值具有一定的偏差。因此精确的相机内参标定方法成为了该行业研究的重点课题。
2、现有技术中相机内参标定的过程比较繁琐,例如:需要提前指定棋盘格的行数列数作为输入,需要多次拍摄获得多张不同方向角度的标定板图片。获得多张标定图片后再进行标定、验证,此外鲁棒性差,棋盘格不能有干扰,否则就会使得角点检测失败,无法同时进行多个相机的标定。
技术实现思路
1、本公开提供一种全自动相机内参标定方法、装置、电子设备和介质,包括:定位标定板角点位置;遍历每个角点,找到各角点的邻近角点,依次扩张,形成一个完整的标定结构单元,以完成标定,相比于现有技术,本公开只需要拍摄一次标定板图片,而且不需要提前指定棋盘格的行数列数,省时省力,方便简捷;不受外界干扰,即抗干扰能力强;能够自动扩张形成标定结构单元,科学智能。
2、为达到上述目的,本公开采用如下技术方案:
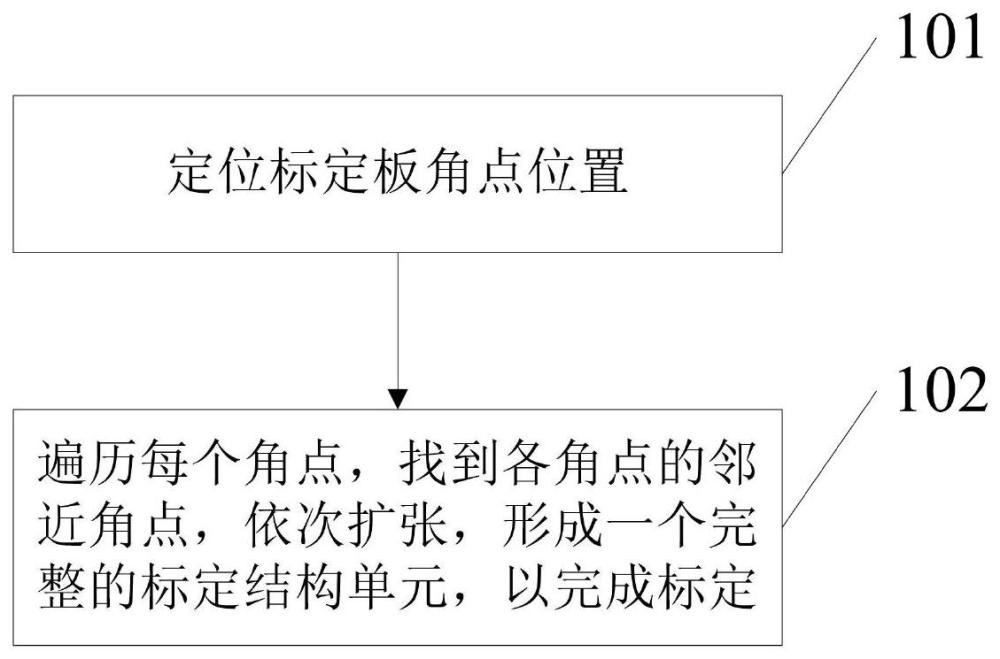
3、本公开第一方面提供一种全自动相机内参标定方法,包括:
4、定位标定板角点位置。
5、遍历每个所述角点,找到各所述角点的邻近角点,依次扩张,形成一个完整的标定结构单元,以完成标定。
6、进一步的,所述的全自动相机内参标定方法,在定位标定板角点位置之后,还包括:
7、依据所述角点设计图形,进行梯度计算:
8、
9、式中,c是理想的角点位置,p是c局部邻域的一个像素点,gp是p点的图像梯度向量。
10、进一步的,所述的全自动相机内参标定方法,所述标定板包括:
11、所述标定板为棋盘格或原点板或apriltag。
12、进一步的,所述的全自动相机内参标定方法,定位标定板角点位置,包括:
13、根据所述标定板图形,定义所述角点原型。
14、对所述标定板进行卷积运算:
15、∫rf(x)h(t-x)d(x)
16、式中,h是对应的滤波核,f是整个图像,t卷积核与图像对应位置的乘积和。
17、根据所述角点原型,计算各所述像素点与所述角点的相似程度,获取所述角点的相似度概率值。
18、扩展所述角点邻域,查找分数最高的所述像素点。
19、计算梯度强度:
20、g(x,y)=dx(i,j)+dy(i,j)
21、dx(i,j)=i(i+1,j)-i(i,j)
22、dy(i,j)=i(i,j+1)-i(i,j)
23、式中,i是所述像素的值(rgb值),(i,j)为所述像素的坐标。
24、所述梯度强度与所述角点的相似度概率值相乘,获得所述角点分数,以确定标定板角点位置。
25、进一步的,所述的全自动相机内参标定方法,在计算梯度强度之前,还包括:
26、对所述像素点进行滤波。
27、进一步的,所述的全自动相机内参标定方法,所述梯度强度与所述角点的相似度概率值相乘,获得所述角点分数,以确定标定板角点位置之后,还包括:
28、通过预设阈值,对所述角点分数进行过滤。
29、进一步的,所述的全自动相机内参标定方法,在遍历每个所述角点,找到各所述角点的邻近角点,依次扩张,形成一个完整的标定结构单元,以完成标定之后,还包括:
30、存储所述标定结果。
31、本公开第二方面提供一种全自动相机内参标定装置,包括:
32、定位单元,用于定位标定板角点位置。
33、标定单元,用于遍历每个所述角点,找到各所述角点的邻近角点,依次扩张,形成一个完整的标定结构单元,以完成标定。
34、进一步的,所述的全自动相机内参标定装置,还包括:
35、计算单元,用于依据所述角点设计图形,进行梯度计算:
36、
37、式中,c是理想的角点位置,p是c局部邻域的一个像素点,gp是p点的图像梯度向量。
38、进一步的,所述的全自动相机内参标定装置,所述定位单元包括:
39、定义模块,用于根据所述标定板图形,定义所述角点原型。
40、卷积模块,用于对所述标定板进行卷积运算:
41、∫rf(x)h(t-x)d(x)
42、式中,h是对应的滤波核,f是整个图像,t卷积核与图像对应位置的乘积和。
43、第一计算模块,用于根据所述角点原型,计算各所述像素点与所述角点的相似程度,获取所述角点的相似度概率值。
44、查找模块,用于扩展所述角点邻域,查找分数最高的所述像素点。
45、第二计算模块,用于计算梯度强度:
46、g(x,y)=dx(i,j)+dy(i,j)
47、dx(i,j)=i(i+1,j)-i(i,j)
48、dy(i,j)=i(i,j+1)-i(i,j)
49、式中,i是所述像素的值(rgb值),(i,j)为所述像素的坐标。
50、获得模块,用于所述梯度强度与所述角点的相似度概率值相乘,获得所述角点分数,以确定标定板角点位置。
51、进一步的,所述的全自动相机内参标定装置,还包括:
52、滤波模块,用于对所述像素点进行滤波。
53、进一步的,所述的全自动相机内参标定装置,还包括:
54、过滤模块,用于通过预设阈值,对所述角点分数进行过滤。
55、进一步的,所述的全自动相机内参标定装置,还包括:
56、存储单元,用于存储所述标定结果。
57、本公开第三方面提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可以在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述方法的步骤。
58、本公开第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
59、本公开提供一种全自动相机内参标定方法、装置、电子设备和介质,包括:定位标定板角点位置;遍历每个角点,找到各角点的邻近角点,依次扩张,形成一个完整的标定结构单元,以完成标定,相比于现有技术,本公开只需要拍摄一次标定板图片,而且不需要提前指定棋盘格的行数列数,省时省力,方便简捷;不受外界干扰,即抗干扰能力强;能够自动扩张形成标定结构单元,科学智能。
60、与此同时,本公开依据角点设计图形,进行梯度计算;根据标定板图形,定义角点原型,对标定板进行卷积运算;根据角点原型,计算各像素点与角点的相似程度,获取角点的相似度概率值;扩展角点邻域,查找分数最高的像素点;计算梯度强度;梯度强度与角点的相似度概率值相乘,获得角点分数,以确定标定板角点位置,进一步提高了内参标定结果的准确率。
61、此外,本公开对像素点进行滤波并通过预设阈值,对角点分数进行过滤,进一步确保了内参标定结果的准确性。
62、最后,本公开存储了标定结果,方便查找。
- 还没有人留言评论。精彩留言会获得点赞!