一种车牌识别方法及装置与流程
本技术涉及车牌识别,具体而言,涉及一种车牌识别方法及装置。
背景技术:
1、etc(electronic toll collection,电子不停车收费)和车牌识别技术在智慧交通系统中有着广泛的应用场景和发展前景。etc可以实现车辆不停车缴费,使得过路收费更加便捷、安全、快速,而车牌识别用于记录车辆的牌照号码、车牌颜色、出入时间,实现车辆的自动管理,以便节省人力、提高效率。
2、高速路口的车牌识别准确性和识别效率,极大地影响高速路的拥堵程度。现有的车牌识别技术,对于光线良好的条件,有着较高的准确性,但是在雾天、阴雨天、夜晚等条件下,识别的精度有待提升。特别是雾霾天气,拍摄的图像噪点多,车牌清晰度和区分度相对较差,对车牌的准确识别是一个极大的挑战。
技术实现思路
1、本技术实施例的目的在于提供一种车牌识别方法及装置,以提升车牌识别的准确性。
2、为了实现上述目的,本技术的实施例通过如下方式实现:
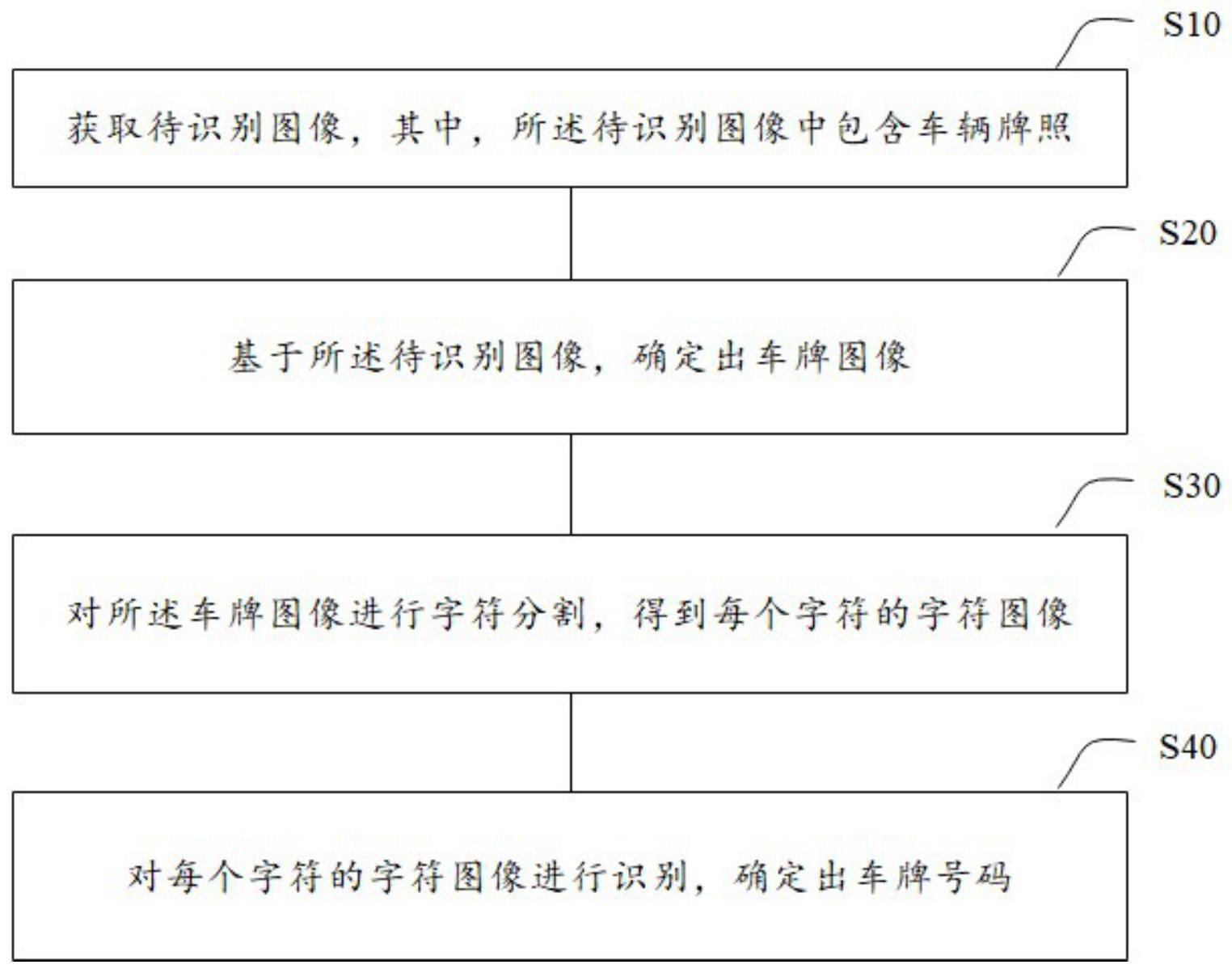
3、第一方面,本技术实施例提供一种车牌识别方法,包括:获取待识别图像,其中,所述待识别图像中包含车辆牌照;基于所述待识别图像,确定出车牌图像;对所述车牌图像进行字符分割,得到每个字符的字符图像;对每个字符的字符图像进行识别,确定出车牌号码。
4、结合第一方面,在第一方面的第一种可能的实现方式中,基于所述待识别图像,确定出车牌图像,包括:对所述待识别图像进行色彩特征提取,得到色彩特征图;基于所述色彩特征图,对所述待识别图像中的车牌区域进行初步定位,确定出第一图像;对所述第一图像进行预处理,得到预处理后的第二图像;对所述第二图像进行边缘检测,确定出所述车牌图像。
5、结合第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,基于所述色彩特征图,对所述待识别图像中的车牌区域进行初步定位,确定出第一图像,包括:从所述色彩特征图中确定出车牌区域;以所述车牌区域的中心为中心,对所述车牌区域从各个方向进行扩展,得到扩展后的车牌区域;基于扩展后的车牌区域,从所述待识别图像中分割出所述第一图像。
6、结合第一方面的第一种可能的实现方式,在第一方面的第三种可能的实现方式中,对所述第一图像进行预处理,得到预处理后的第二图像,包括:对所述第一图像进行灰度化处理,确定出灰度图像;对所述灰度图像进行二值化处理,得到二值化图像;建立所述灰度图像与所述二值化图像的像素映射关系,得到对应有黑白阈值的灰度图像为所述第二图像。
7、结合第一方面的第三种可能的实现方式,在第一方面的第四种可能的实现方式中,对所述第二图像进行边缘检测,确定出所述车牌图像,包括:利用预设的第一梯度算子,计算所述第二图像中每个像素对应的第一梯度;基于每个像素对应的第一梯度,确定出待定边缘区域;利用预设的第二梯度算子,计算所述待定边缘区域中每个像素对应的第二梯度;基于每个像素对应的第二梯度,确定出边缘图像;基于所述边缘图像,确定出所述车牌图像。
8、结合第一方面的第四种可能的实现方式,在第一方面的第五种可能的实现方式中,所述第一梯度算子包含gx和gy,利用预设的第一梯度算子,计算所述第二图像中每个像素对应的第一梯度,包括:利用gx对所述第二图像i的每个像素进行卷积,检测所述第二图像在x方向的梯度变化:
9、
10、其中,gx为第一梯度算子的x方向卷积核;利用gy对所述第二图像i的每个像素进行卷积,检测所述第二图像在y方向的梯度变化:
11、
12、其中,gy为第一梯度算子的y方向卷积核;利用以下公式计算所述第二图像中每个像素对应的第一梯度:
13、
14、其中,g表示第一梯度。
15、结合第一方面的第五种可能的实现方式,在第一方面的第六种可能的实现方式中,gx和gy分别满足的计算方式为:
16、gxx,y=-1*ix-1,y-1+0*ix-1,y+1*ix-1,y+1-2*ix,y-1+0*ix,y+2*ix,y+1-1*ix+1,y-1+0*ix+1,y+1*ix+1,y+1,
17、gyx,y=-1*ix-1,y-1-2*ix-1,y-1*ix-1,y+1+0*ix,y-1+0*ix,y+0*ix,y+1+1*ix+1,y-1+2*ix+1,y+1*ix+1,y+1,
18、其中,gxx,y和gyx,y分别表示像素ix,y在x方向的梯度值和在y方向的梯度值,ix,y表示所述第二图像i的第x行第y列个像素的灰度值。
19、结合第一方面的第四种可能的实现方式,在第一方面的第七种可能的实现方式中,利用预设的第二梯度算子,计算所述待定边缘区域中每个像素对应的第二梯度,包括:获取第二梯度算子hxy:
20、
21、其中,hxy为第二梯度算子,a1、a2、a3、a4、a6、a7、a8、a9分别为对应的权重,δ为权重配置参数;
22、利用第二梯度算子hxy对所述待定边缘区域q的每个像素进行卷积,检测所述待定边缘区域在x方向和在y方向的梯度变化:
23、hxx,y=a3*qx-1,y+1-a1*qx-1,y-1+a6*qx,y+1-a4*qx,y-1+a9*qx+1,y+1-a7*qx+1,y-1,
24、hyx,y=a7*qx+1,y-1-a1*qx-1,y-1+a8*qx+1,y-a2*qx-1,y+a9*qx+1,y+1-a3*qx-1,y+1,
25、其中,hxx,y和hyx,y分别表示像素qx,y在x方向的梯度值和在y方向的梯度值,qx,y表示所述待定边缘区域q的第x行第y列个像素的灰度值。
26、结合第一方面的第七种可能的实现方式,在第一方面的第八种可能的实现方式中,权重配置参数δ满足:
27、
28、其中,qx,y为待定边缘区域q的第x行第y列个像素的灰度值,tbw为所述第二图像的黑白阈值;
29、权重a1、a2、a3、a4、a6、a7、a8、a9满足:
30、
31、
32、
33、
34、
35、
36、
37、
38、其中,
39、qx-1,y-1、qx-1,y、qx-1,y+1、qx,y-1、qx,y、qx,y+1、qx+1,y-1、qx+1,y、qx+1,y+1均相等时,sumq=1;
40、否则,
41、sumq=|qx,y-qx-1,y-1|δ+|qx,y-qx-1,y|δ+|qx,y-qx-1,y+1|δ+|qx,y-qx,y-1|δ+|qx,y-qx,y+1|δ+|qx,y-qx+1,y-1|δ+|qx,y-qx+1,y/δ+/qx,y-qx+1,y+1/δ。
42、第二方面,本技术实施例提供一种车牌识别装置,包括:图像获取单元,用于获取待识别图像,其中,所述待识别图像中包含车辆牌照;车牌确定单元,用于基于所述待识别图像,确定出车牌图像;字符分割单元,用于对所述车牌图像进行字符分割,得到每个字符的字符图像;车牌识别单元,用于对每个字符的字符图像进行识别,确定出车牌号码。
43、有益效果:
44、1.通过获取待识别图像,利用色彩特征提取的方式得到色彩特征图,对待识别图像中的车牌区域进行初步定位,得到第一图像,预处理后得到第二图像进行边缘检测,以此方式确定出车牌图像。然后对车牌图像进行字符分割,得到每个字符的字符图像并进行识别,确定出车牌号码。这样能够通过色彩特征快速检测车牌存在的区域,进行初步的区域划定,然后利用边缘检测技术进行车牌图像的精确检测,从而准确地确定出车牌区域,便于在恶劣的环境条件下实现车牌的准确定位,从而提高车牌识别的准确性。
45、2.对第一图像进行灰度化处理,确定出灰度图像;对灰度图像进行二值化处理,得到二值化图像;建立灰度图像与二值化图像的像素映射关系,得到对应有黑白阈值的灰度图像为第二图像。第二图像主要用于做精准的边缘检测。本方案利用了第一梯度算子计算第二图像中每个像素对应的第一梯度;基于每个像素对应的第一梯度确定出待定边缘区域;利用第二梯度算子计算待定边缘区域中每个像素对应的第二梯度;基于每个像素对应的第二梯度,确定出边缘图像,进一步确定出车牌图像。本方案中的第一梯度算子,主要用来确定边缘区域,做边缘的初步识别,因此,选用了sobel算子,计算效率高。而第二梯度算子是本方案为了应对大雾等恶劣天气导致的图像中噪点多,图像模糊等问题所设计的,在具体计算时能够考虑到像素所对应的黑白阈值(第二图像为对应有黑白阈值的灰度图像),以提高边缘检测精度。
46、3.设计的第二梯度算子,以检测的当前像素(即qx,y)的灰度值与黑白阈值之间的像素差异,确定权重配置参数δ,灰度值与黑白阈值越接近,周围像素点对应的权重a1、a2、a3、a4、a6、a7、a8、a9则分配得越均匀,灰度值与黑白阈值相差越大,权重a1、a2、a3、a4、a6、a7、a8、a9则分配得越不均,且权重配置参数δ能参考相对更全局的灰度值,而权重分配时也考虑到了更直接的因素(即周围像素点的灰度值与当前像素点的灰度值之间的差异),从而使得第二梯度算子在图像中噪点多,图像相对模糊、对比度较差等情况下,具有更好的表现,能够更准确检测出车牌边缘,从而提升车牌识别的准确性。
47、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!