本技术涉及工程项目管理,特别是涉及一种基于机器视觉的工程项目管理系统。
背景技术:
1、现有的工程项目管理方法,例如锂离子电池涂布工段的涂布机、nmp回收设备、nmp废液精馏设备等土建、机电或化工等工程项目的管理长期处于依靠人工巡检和管理的阶段,以致不能及时发现和协调解决存在的问题,现场经常出现物料缺少、人员不足、管道干涉多、施工现场杂乱、事故隐患多、进度赶不上计划、项目施工与设计图纸不符合等现象。
技术实现思路
1、基于此,有必要针对现有工程项目管理存在的问题,提供一种基于机器视觉的工程项目管理系统。
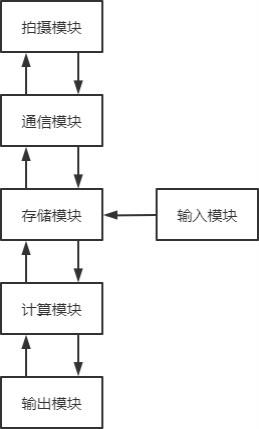
2、本技术提供了一种基于机器视觉的工程项目管理系统,该系统包括:拍摄模块、输入模块、存储模块、计算模块、输出模块;
3、所述拍摄模块用于拍摄现场图像;
4、所述输入模块包括用于输入项目信息的设备或接口,所述输入模块用于实现系统与管理人员的交互;
5、所述存储模块用于存储所述现场图像和项目信息;
6、所述计算模块用于根据所述现场图像和所述项目信息对物体进行三维建模得到物体的三维坐标模型,并基于所述三维坐标模型以及所述项目信息确定项目管理方案;
7、所述输出模块用于展示所述项目管理方案。
8、优选的,所述拍摄模块包括固定摄像头和移动摄像头;多个所述固定摄像头分别安装于作业现场,且多个所述固定摄像头不安装在同一直线上;每个所述固定摄像头根据安装高度以及作业现场场景大小选择焦距,且每个所述固定摄像头根据设定的频率进行循环扫描拍摄所述现场图像;多个所述移动摄像头分别安装于巡逻机器人、无人机以及施工人员衣服上,且每个所述移动摄像头按照设定的周期出动拍摄所述现场图像;所述作业现场建立有坐标系,每张所述现场图像进行存储时均携带有标签,所述标签包括拍摄现场图像的摄像头的三维坐标、拍摄角度以及拍摄时间。
9、优选的,还包括红外辅助定位激光源,所述红外辅助定位激光源设置于所述固定摄像头以及所述移动摄像头上;所述红外辅助定位激光源包括光源和球形外壳,所述光源设置于所述球形外壳内;所述球形外壳在各个方向上分别开设有形状不同的小孔,相邻小孔之间的间隔距离一致;各形状不同的小孔用于透过所述光源射出的光束;所述光束照射于物体上用于确定物体相较于光源的角度,并校准所述拍摄角度。
10、优选的,所述项目信息包括项目中物料的三维模型、物料的信息、人员的信息、项目进度计划、项目的流程图、设备布局图、管道布局图、钢结构施工图;物料的信息包括用量清单、岗位种类、岗位数量;人员的信息包括人脸图像和体形图像。
11、优选的,所述存储模块包括现场图像库、项目物料库、项目资料库、项目图纸库、计算结果库;所述现场图像库用于存储所述现场图像;所述项目物料库用于存储所述项目中物料的三维模型;所述项目资料库用于存储所述项目进度计划、所述物料的信息、所述人员的信息;所述项目图纸库用于存储所述项目的流程图、所述设备布局图、所述管道布局图、所述钢结构施工图;所述计算结果库用于存储所述物体的三维坐标模型。
12、优选的,所述项目管理方案包括变更管理方案、进度管理方案、安全管理方案、物料管理方案、质量管理方案;
13、所述变更管理方案包括给出第一预警、修改安装方案以及材料用量变更清单;所述第一预警用于提醒管理人员进行安装方案变更;
14、所述进度管理方案包括根据工程进度以及投入的作业人员数量、设备数量计算出项目需要增加的人员数量和设备数量;
15、所述安全管理方案包括给出第二预警;所述第二预警用于提醒管理人员和现场施工人员消除安全隐患;
16、所述物料管理方案包括根据设定的第一时间周期存储不同时刻的物料数据;所述物料数据包括初始数据和计算数据;所述初始数据包括扫描录入数据和设计录入数据;所述扫描录入数据为现场图像中物料的数量,所述设计录入数据为项目所需的全部物料数量;所述计算数据包括根据所述初始数据计算出的待安装物料数量、待增补物料数量、物料损耗数量以及物料遗失数量;
17、所述质量管理方案包括给出第三预警;所述第三预警用于提醒管理人员进行作业质量实体监督。
18、优选的,所述计算模块包括三维建模子模块、变更子模块、进度子模块、安全子模块、物料子模块、质量子模块;
19、所述三维建模子模块用于根据所述现场图像、所述标签以及所述项目中物料的三维模型对物体进行三维建模得到物体的三维坐标模型;
20、所述变更子模块用于根据所述物体的三维坐标模型确定管道预计安装的路径,并将管道预计安装的路径与所述设备布局图、所述管道布局图进行对比,判定是否发生碰撞,是则执行所述变更管理方案,否则采用所述管道预计安装的路径;
21、所述进度子模块用于将当前时刻的所述物体的三维坐标模型与此前的所述物体的三维坐标模型进行对比,确定时间内的工程增量,并根据工程增量计算出工程进度,比较所述工程进度与所述项目进度计划之间差异,若所述工程进度慢于所述项目进度计划则执行所述进度管理方案,否则按照所述工程进度作业;
22、所述安全子模块用于对所述现场图像进行分析,若现场图像中出现安全隐患则执行所述安全管理方案,若未出现安全隐患则继续分析;
23、所述物料子模块用于执行所述物料管理方案;
24、所述质量子模块用于比较所述物体的三维坐标模型与所述钢结构施工图、所述设备布局图、所述管道布局图,判定是否出现不符合施工布局的现象,是则执行所述质量管理方案,否则无需特殊处理。
25、优选的,所述三维建模子模块中建模过程包括:
26、步骤1:获取t时刻的现场图像,其包括未被建模且一时间dt内未发生位移的物体a1;记t时刻的现场图像对应的标签为(x,y,z,θ,φ,t);(x,y,z)为拍摄现场图像的摄像头的三维坐标;(θ,φ)为摄像头的拍摄角度;
27、步骤2:从物体a1的图像的边缘曲线中截取出第一边缘图形;若第一边缘图形中相邻两条线的夹角≤165°,则认为这两条线是独立的两条线,否则认为是同一条线;
28、步骤3:对第一边缘图形的周长进行归一化处理,得到第一边缘图形的特征数组;
29、步骤4:从各种所述物料的三维模型中截取出所有第二边缘图形;将所述第一边缘图形的特征数组与所有第二边缘图形的特征数组进行比较,若特征数组中每一项的数值差在±0.05内,则计算符合条件的项数与数组总项数之间的比例,所述比例作为第一边缘图形与物料c相似的概率;否则将第一边缘图形与物料c相似的概率记为0;
30、步骤5:筛选出最高的概率,并确定最高概率对应的物料c的三维照片模型;
31、步骤6:查询其它摄像头拍摄的包含物料c的现场图像;根据拍摄包含物料c的现场图像的摄像头的三维坐标、拍摄角度计算出物体a1在作业现场的确切坐标;将最高概率对应的物料c的三维照片模型放入所述坐标系中,得到物体a1的三维坐标模型。
32、优选的,所述用于输入项目信息的设备包括键盘、鼠标;所述用于输入项目信息的接口包括信息传输的接口。
33、优选的,还包括通信模块,所述通信模块用于将所述现场图像传输至所述存储模块。
34、有益效果:该系统使用拍摄模块来获得项目现场的现场图像,并通过计算模块基于所述三维坐标模型以及所述项目信息确定项目管理方案,相较于现有人工进行巡检的方式节省了人力物力、并且提升了作业与管理的效率。