车牌识别方法、装置、终端、计算机程序和存储介质与流程
本技术涉及图像处理,具体涉及一种车牌识别方法、装置、终端、计算机程序和存储介质。
背景技术:
1、目前,车牌识别功能在智慧城市、平安社区等业务场景下存在广泛需求,该功能主要可以分解成图像处理和字符识别。对于字符识别,目前较为流行的方法,有基于字符分割的方法和基于特征处理的方法。基于字符分割的方法要先把车牌图片的每个字符进行检测并分割,再进行字符分类;基于特征处理的方法是把车牌图片整个进行特征提取,根据提取的字符特征进行字符的识别。而图像处理的目的是提高在移动中抓拍的车牌的清晰度,常见的去模糊方法主要有投影法和滤波法等。投影法通过将图像二值化,进行投影像素点,重构图像;滤波法是针对图像的频域信息进行处理,过滤噪声频率来提高图像清晰度。进行车牌识别的各功能关系如图1所示。
2、在道路卡口、社区门禁等场景中,智能摄像头的普及有助于及时获取车辆的结构化信息,包括车辆类型、车辆颜色、车牌号码等。不仅如此,通过对车牌号码的识别,可以有效确认车辆的具体信息,极大提升城市、社区的安防治理效率。但在实际应用中,车辆在移动的情况下,在进行去模糊时,去模糊后的车牌图像中的字符容易发生失真变形,这会直接影响识别结果的准确性。
3、因此,如何解决去模糊后的车牌图像中的字符的失真变形,成为在提高车牌识别准确率方面亟需解决的问题。
技术实现思路
1、本技术实施例提供一种车牌识别方法、装置、终端、计算机程序和存储介质,用以解决模糊后的车牌图像中的字符失真变形的技术问题。
2、第一方面,本技术实施例提供一种车牌识别方法,包括:
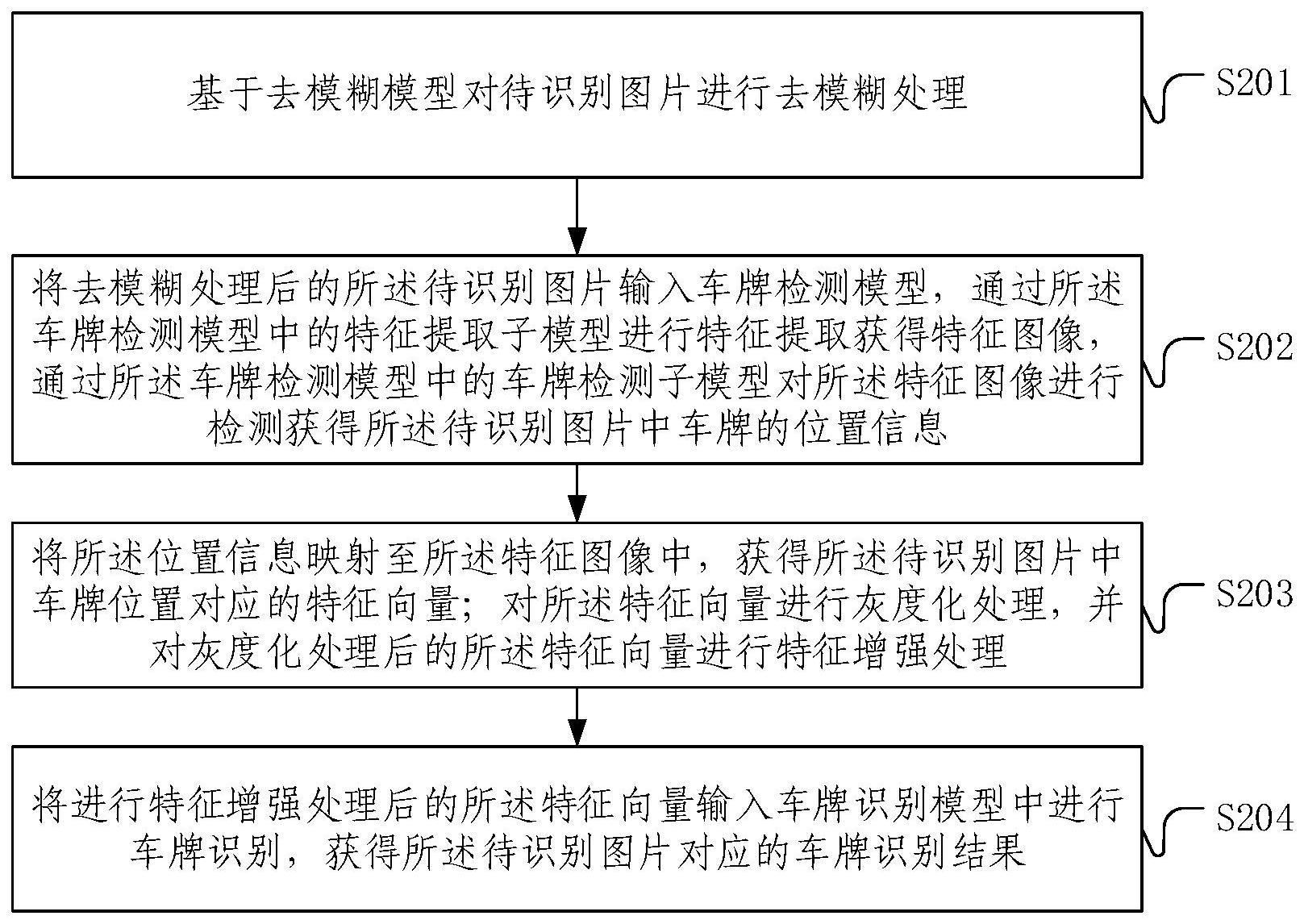
3、基于去模糊模型对待识别图片进行去模糊处理;
4、将去模糊处理后的所述待识别图片输入车牌检测模型,通过所述车牌检测模型中的特征提取子模型进行特征提取获得特征图像,通过所述车牌检测模型中的车牌检测子模型对所述特征图像进行检测获得所述待识别图片中车牌的位置信息;
5、将所述位置信息映射至所述特征图像中,获得所述待识别图片中车牌位置对应的特征向量;对所述特征向量进行灰度化处理,并对灰度化处理后的所述特征向量进行特征增强处理;
6、将进行特征增强处理后的所述特征向量输入车牌识别模型中进行车牌识别,获得所述待识别图片对应的车牌识别结果。
7、在一个实施例中,所述基于去模糊模型对待识别图片进行去模糊处理,包括:
8、接收用户的去模糊处理选择指令;
9、当所述去模糊处理选择指令包括目标去模糊模式时,基于所述目标去模糊模式确定所述去模糊模型中各维纳滤波器分支的权重,所述目标去模糊模式包括去运动模糊模式、去散焦模糊模式或去高斯模糊模式;
10、将所述待识别图片输入权重最高的所述维纳滤波器分支,以基于所述目标去模糊模式对所述待识别图片进行去模糊处理。
11、在一个实施例中,所述基于去模糊模型对待识别图片进行去模糊处理,还包括:
12、当所述去模糊处理选择指令包括自适应去模糊处理时,基于模糊分类模型对所述待识别图片进行分类处理,获得模糊分类结果;
13、基于所述模糊分类结果确定所述去模糊模型中各维纳滤波器分支对应的权重;
14、基于各所述权重,通过各所述维纳滤波器分支对所述待识别图片进行自适应去模糊处理。
15、在一个实施例中,所述对灰度化处理后的所述特征向量进行特征增强处理,包括:
16、基于拉普拉斯算子对灰度化处理后的所述特征向量进行特征增强处理,获得特征增强处理后的所述特征向量:
17、
18、
19、其中,x表示横向坐标,y表示纵向坐标,g(x,y)表示特征增强处理后的所述特征向量,f(x,y)表示灰度化处理后的所述特征向量,c表示权重系数,λ表示调控系数,表示各所述维纳滤波器分支的权重构成的权重向量。
20、在一个实施例中,所述模糊分类模型、所述去模糊模型、所述车牌检测模型和所述车牌识别模型基于如下方式训练得到:
21、构建训练集,所述训练集包括多个模糊车牌图片、各所述模糊车牌图片分别对应的参考车牌图片和标签集,所述标签集包括所述模糊车牌图片的类别标签、车牌位置标签和车牌字符标签;
22、将各所述模糊车牌图片和对应的所述类别标签输入初始模糊分类模型,完成对各所述模糊车牌图片的分类处理;
23、将分类后的各所述模糊车牌图片和对应的所述参考车牌图片,按照类别分别输入初始去模糊模型中各类别对应的维纳滤波器分支进行去模糊处理;
24、将去模糊处理后的各所述模糊车牌图片和对应的所述车牌位置标签输入初始车牌检测模型,获得各所述模糊车牌图片中的车牌位置信息;
25、基于所述车牌位置信息进行特征增强处理,获得各所述车牌位置信息对应的增强特征向量;
26、将各所述增强特征向量和对应的所述车牌字符标签输入初始车牌识别模型,获得各所述模糊车牌图片对应的识别结果;
27、建立综合损失函数,以最小化所述综合损失函数为目标对所述初始模糊分类模型、所述初始去模糊模型、所述初始车牌检测模型和所述初始车牌识别模型的参数进行调整,以获得所述模糊分类模型、所述去模糊模型、所述车牌检测模型和所述车牌识别模型;
28、其中,所述综合损失函数为所述模糊分类模型的损失、所述去模糊模型的损失、所述车牌检测模型的损失和所述车牌识别模型的损失的加权和。
29、在一个实施例中,所述构建训练集,包括:
30、获取车辆视频数据,并对所述车辆视频数据进行解码获得视频帧图片,将包括车牌信息的视频帧图片确定为参考车牌图片;
31、基于去模糊数据集对生成对抗式网络进行训练,获得可生成不同类别的模糊图片的目标生成器;
32、将所述参考车牌图片输入所述目标生成器,获得所述参考车牌图片对应的模糊车牌图片,针对所述模糊车牌图片建立标签集,所述模糊车牌图片、所述参考车牌图片和所述标签集构成所述训练集。
33、第二方面,本技术实施例提供一种车牌识别装置,包括:
34、去模糊处理模块,用于基于去模糊模型对待识别图片进行去模糊处理;
35、车牌检测模块,用于将去模糊处理后的所述待识别图片输入车牌检测模型,通过所述车牌检测模型中的特征提取子模型进行特征提取获得特征图像,通过所述车牌检测模型中的车牌检测子模型对所述特征图像进行检测获得所述待识别图片中车牌的位置信息;
36、增强模块,用于将所述位置信息映射至所述特征图像中,获得所述待识别图片中车牌位置对应的特征向量;对所述特征向量进行灰度化处理,并对灰度化处理后的所述特征向量进行特征增强处理;
37、识别模块,用于将进行特征增强处理后的所述特征向量输入车牌识别模型中进行车牌识别,获得所述待识别图片对应的车辆识别结果。
38、第三方面,本技术实施例提供一种终端,包括存储器,收发机,处理器;
39、存储器,用于存储计算机程序;收发机,用于在所述处理器的控制下收发数据;处理器,用于读取所述存储器中的计算机程序并执行以下操作:
40、基于去模糊模型对待识别图片进行去模糊处理;
41、将去模糊处理后的所述待识别图片输入车牌检测模型,通过所述车牌检测模型中的特征提取子模型进行特征提取获得特征图像,通过所述车牌检测模型中的车牌检测子模型对所述特征图像进行检测获得所述待识别图片中车牌的位置信息;
42、将所述位置信息映射至所述特征图像中,获得所述待识别图片中车牌位置对应的特征向量;对所述特征向量进行灰度化处理,并对灰度化处理后的所述特征向量进行特征增强处理;
43、将进行特征增强处理后的所述特征向量输入车牌识别模型中进行车牌识别,获得所述待识别图片对应的车辆识别结果。
44、第四方面,本技术实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第一方面所述的车牌识别方法的步骤。
45、第五方面,本技术实施例提供一种处理器可读存储介质,所述处理器可读存储介质存储有计算机程序,所述计算机程序用于使处理器执行上述第一方面所述的车牌识别方法的步骤。
46、本技术实施例提供的车牌识别方法、装置、终端、计算机程序和存储介质,通过设置轮廓信息强化模块,基于车牌检测模型输出的车牌的位置信息获取待识别图片中车牌位置对应的特征向量,进而对进行灰度化处理后的特征向量进行特征增强处理,从而增强车牌字符的轮廓信息,进而改善车牌字符的失真变形,以提高后续车牌识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!