图像去雾方法、装置、设备和存储介质
本发明涉及图像处理,尤其涉及一种图像去雾方法、装置、设备和存储介质。
背景技术:
1、对遥感图像有效去雾以及恢复图像细节信息具有重要意义。
2、现有技术中,图像去雾技术中性能较为突出的为基于神经网络的去雾技术,基于神经网络的去雾技术主要是在合成的数据集上进行模型训练,也即通过清晰图像模拟出带雾图像,将该清晰图像和带雾图像合成得到的数据集作为去雾模型的训练数据,进而基于训练后的去雾模型进行图像去雾。因合成的数据集不能完全模拟真实世界图像中雾的分布,现有图像去雾方法的去雾精度较差。
技术实现思路
1、本发明提供一种图像去雾方法、装置、设备和存储介质,用以解决现有技术中去雾精度较差的缺陷,实现提高图像去雾的精度。
2、第一方面,本发明提供一种图像去雾方法,该方法包括:
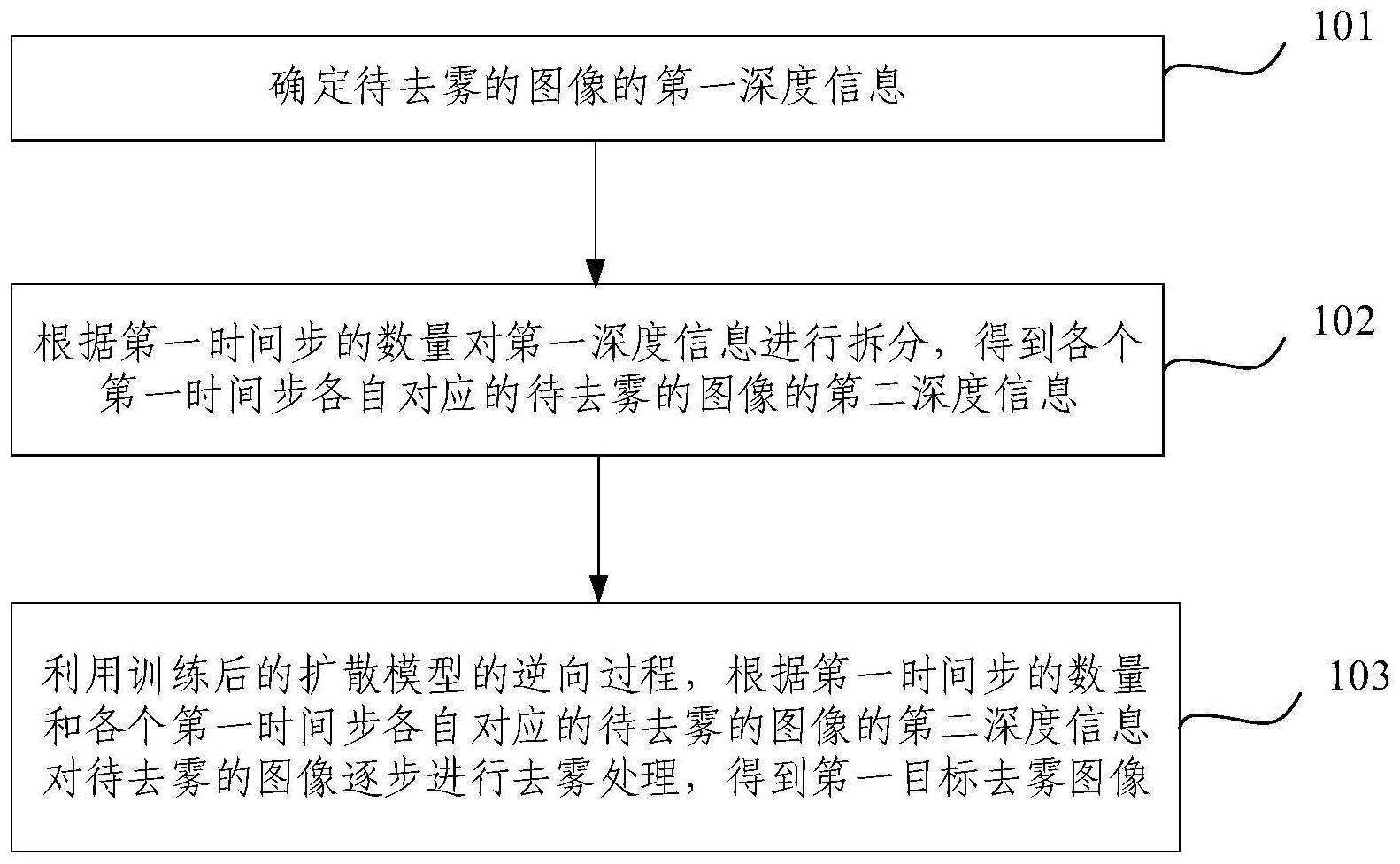
3、确定待去雾的图像的第一深度信息;
4、根据第一时间步的数量对所述第一深度信息进行拆分,得到各个所述第一时间步各自对应的待去雾的图像的第二深度信息;
5、利用训练后的扩散模型的逆向过程,根据所述第一时间步的数量和各个所述第一时间步各自对应的待去雾的图像的第二深度信息对所述待去雾的图像逐步进行去雾处理,得到第一目标去雾图像。
6、可选地,所述第一深度信息包括所述待去雾图像对应的最大深度值和所述待去雾图像对应的最小深度值,所述根据第一时间步的数量对所述第一深度信息进行拆分,得到各个所述第一时间步各自对应的待去雾的图像的第二深度信息,包括:
7、根据所述最大深度值和所述最小深度值,确定第一差值;
8、根据所述第一时间步的数量和所述第一差值,得到各个所述第一时间步各自对应的待去雾的图像的第二深度信息。
9、可选地,所述利用训练后的扩散模型的逆向过程,根据所述第一时间步的数量和各个所述第一时间步各自对应的待去雾的图像的第二深度信息对所述待去雾的图像逐步进行去雾处理,得到第一目标去雾图像,包括:
10、针对每个所述第一时间步,利用训练后的扩散模型的逆向过程,根据所述第一时间步各自对应的待去雾的图像的第二深度信息和所述第一时间步的整数,得到所述第一时间步对应的第一去雾图像;其中,第k1-1个第一时间步对应的待去雾的图像为第k1个第一时间步对应的第一去雾图像;其中,k1为大于0小于n1的整数;n1表示所述第一时间步的数量;
11、根据各个所述第一时间步各自对应的第一去雾图像和所述第一时间步的数量,得到所述第一目标去雾图像。
12、可选地,所述利用训练后的扩散模型的逆向过程,根据所述第一时间步各自对应的待去雾的图像的第二深度信息和所述第一时间步的整数,得到所述第一时间步对应的第一去雾图像,包括:
13、利用训练后的扩散模型的逆向过程,根据所述第一时间步各自对应的待去雾的图像的第二深度信息、所述第一时间步的整数,得到所述第一时间步对应的第一透射信息和所述第一时间步对应的大气全局光的第一强度信息;
14、根据所述第一透射信息和所述第一强度信息,得到所述第一时间步对应的第一去雾图像。
15、可选地,所述扩散模型通过下述方法训练得到,包括:
16、获取第一样本图像;
17、根据第二时间步的数量对所述第一样本图像对应的第三深度信息进行拆分,得到各个所述第二时间步各自对应的第一样本图像的第四深度信息;
18、利用所述扩散模型的前向过程,根据所述第二时间步的数量和各个所述第二时间步各自对应的第一样本图像的第四深度信息,得到各个所述第二时间步各自对应的加雾图像;其中,第k2个时间步对应添加的噪声为根据第k2个第二时间步对应的第二透射信息和第k2个第二时间步对应的大气全局光的第二强度信息得到,其中,k2为大于0小于n2的整数;n2表示所述第二时间步的数量;
19、利用所述扩散模型的前向过程,根据各个所述第二时间步各自对应的加雾图像和所述第二时间步的数量,得到目标加雾图像;
20、利用所述扩散模型的逆向过程,根据所述第二时间步的数量和各个所述第二时间步各自对应的第一样本图像的第四深度信息,对所述目标加雾图像进行去雾处理,得到第二目标去雾图像;
21、利用目标损失函数监督所述扩散模型学习,迭代更新所述扩散模型的参数,得到所述训练后的扩散模型。
22、可选地,所述利用所述扩散模型的前向过程,根据所述第二时间步的数量和各个所述第二时间步各自对应的第一样本图像的第四深度信息,得到各个所述第二时间步各自对应的加雾图像,包括:
23、针对每个所述第二时间步,根据所述第二时间步对应的第一样本图像的第四深度信息和预设的随机参数,得到所述第二时间步对应的第二透射信息;
24、根据所述第二透射信息和所述第二时间步对应的大气全局光的第二强度信息,得到所述第二时间步对应的加雾图像,所述第二强度信息为预设的。
25、可选地,所述利用所述扩散模型的逆向过程,根据所述第二时间步的数量和各个所述第二时间步各自对应的第一样本图像的第四深度信息,对所述目标加雾图像进行去雾处理,得到第二目标去雾图像,包括:
26、针对每个所述第二时间步,根据所述第二时间步对应的第一样本图像的第四深度信息和所述第二时间步的数量,得到所述第二时间步对应的第三透射信息和所述第二时间步对应的大气全局光的第三强度信息;
27、根据所述第三透射信息和所述第三强度信息,得到所述第二时间步对应的第二去雾图像;
28、根据各个所述第二时间步各自对应的第二去雾图像和所述第二时间步的数量,得到第二目标去雾图像。
29、可选地,所述目标损失函数根据各个所述第二时间步各自对应的第三透射信息、各个所述第二时间步各自对应的第二透射信息、各个所述第二时间步各自对应的大气全局光的第三强度信息、各个所述第二时间步各自对应的第二强度信息得到。
30、可选地,所述方法还包括:
31、利用图像相似性评价指标ssim和峰值信噪比psnr中至少一项对所述扩散模型进行评价,得到目标评价结果。
32、第二方面,本发明还提供一种图像去雾装置,该装置包括:
33、确定模块,用于确定待去雾的图像的第一深度信息;根据第一时间步的数量对所述第一深度信息进行拆分,得到各个所述第一时间步各自对应的待去雾的图像的第二深度信息;
34、处理模块,用于利用训练后的扩散模型的逆向过程,根据所述第一时间步的数量和各个所述第一时间步各自对应的待去雾的图像的第二深度信息对所述待去雾的图像逐步进行去雾处理,得到第一目标去雾图像。
35、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述图像去雾方法。
36、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述图像去雾方法。
37、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述图像去雾方法。
38、本发明提供的一种图像去雾方法、装置、设备和存储介质,通过确定待去雾的图像的第一深度信息,然后根据第一时间步的数量对第一深度信息进行拆分,得到各个第一时间步各自对应的待去雾的图像的第二深度信息,进而,利用训练后的扩散模型的逆向过程,根据第一时间步的数量和各个第一时间步各自对应的待去雾的图像的第二深度信息对所述待去雾的图像逐步进行去雾处理,得到第一目标去雾图像。本发明中因利用第一时间步的数量对待去雾的图像的第一深度信息进行拆分,进而,利用训练后的扩散模型的逆向过程,根据第一时间步的数量和各个第一时间步各自对应的待去雾的图像的第二深度信息对待去雾的图像逐步进行去雾处理,得到第一目标去雾图像,也即将扩散模型与待去雾的图像的第一深度信息相结合,生成的第一目标去雾图像的细节特征充足,而且去雾处理的精度较高。
- 还没有人留言评论。精彩留言会获得点赞!