一种风机叶片表面缺陷视觉检测方法与流程
本发明涉及图像数据处理,具体涉及一种风机叶片表面缺陷视觉检测方法。
背景技术:
1、风力发电是一种利用风能转化为电能的可再生能源技术,作为一种可再生、环境友好、经济高效的能源形式,对实现可持续发展目标具有重要意义。而风力发电机的核心部件风机叶片即转子叶片,其工作性能直接影响风力发电机的工作效率和使用寿命,所以需要及时发现并处理风机叶片表面的缺陷,以提高风机叶片的工作性能。
2、由于人工检测的效率和准确度较低,所以通常通过图像处理的方法根据风机叶片的正视图灰度图像进行分析实现自动检测,现有技术通常根据缺陷区域与正常区域之间灰度差异较大的特性,实现风机叶片表面的缺陷检测。但是考虑到风力发电机的工作环境,对应风机叶片表面可能存在与缺陷区域灰度值相似的污渍,使得根据现有技术进行缺陷检测时,可能存在一些不影响风机叶片工作性能的污渍对应的区域被误识别为缺陷区域,因此采用现有技术对风机叶片表面缺陷检测的准确度较低。
技术实现思路
1、为了解决采用现有技术对风机叶片表面缺陷检测的准确度较低的技术问题,本发明的目的在于提供一种风机叶片表面缺陷视觉检测方法,所采用的技术方案具体如下:
2、本发明提出了一种风机叶片表面缺陷视觉检测方法,所述方法包括:
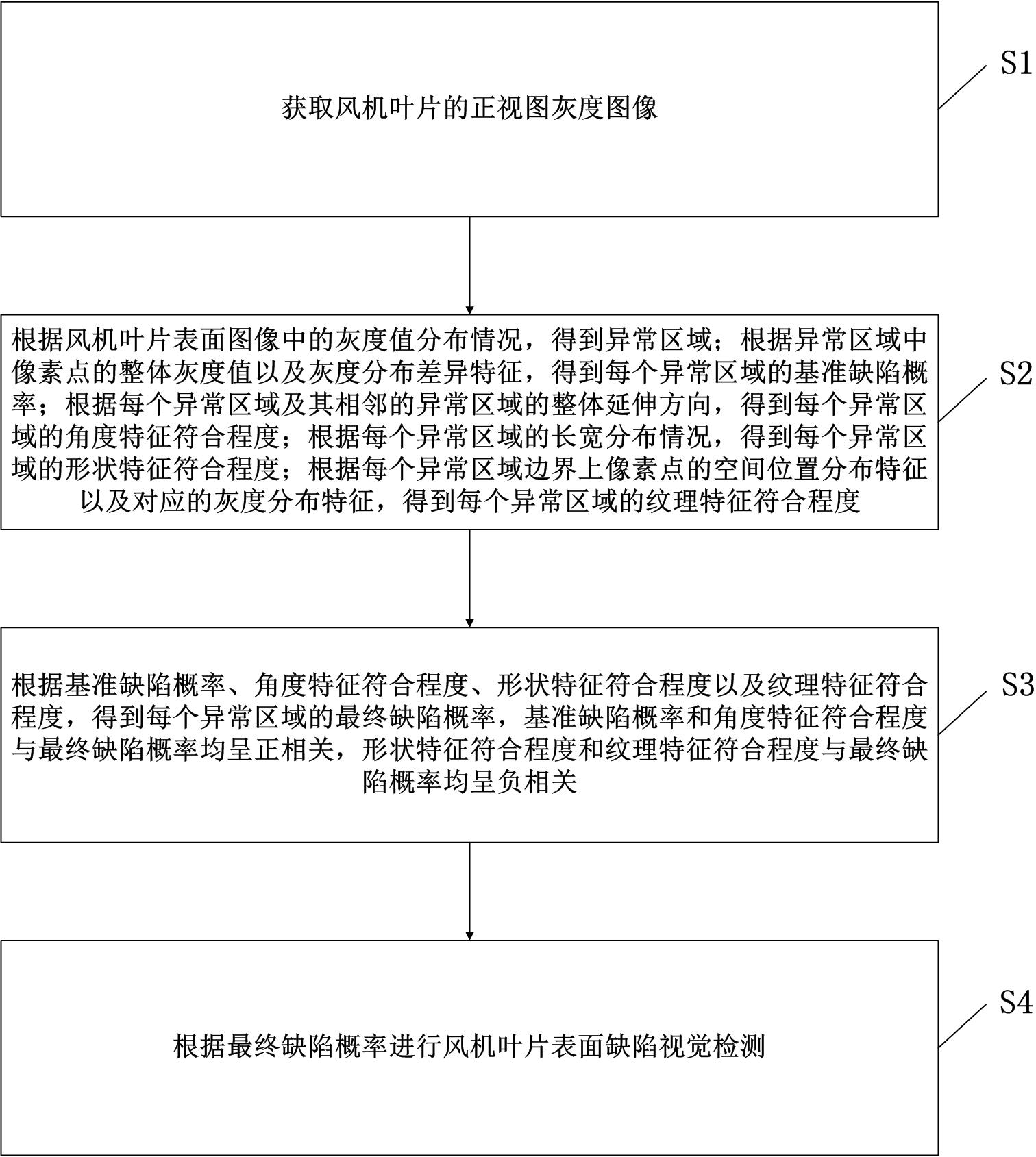
3、获取风机叶片的正视图灰度图像;
4、根据所述正视图灰度图像中的灰度值分布情况,得到异常区域;根据异常区域中像素点的整体灰度值以及灰度分布差异特征,得到每个异常区域的基准缺陷概率;根据每个异常区域及其相邻的异常区域的整体延伸方向,得到每个异常区域的角度特征符合程度;根据每个异常区域的长宽分布情况,得到每个异常区域的形状特征符合程度;根据每个异常区域边界上像素点的空间位置分布特征以及对应的灰度分布特征,得到每个异常区域的纹理特征符合程度;
5、根据所述基准缺陷概率、所述角度特征符合程度、所述形状特征符合程度以及所述纹理特征符合程度,得到每个异常区域的最终缺陷概率,所述基准缺陷概率和角度特征符合程度与所述最终缺陷概率均呈正相关,所述形状特征符合程度和所述纹理特征符合程度与所述最终缺陷概率均呈负相关;
6、根据最终缺陷概率进行风机叶片表面缺陷视觉检测。
7、进一步地,所述角度特征符合程度的获取方法包括:
8、将每个异常区域对应的最小外接椭圆的长轴所在的直线,作为每个异常区域的延伸直线;将每个异常区域对应的质心与风机轴心之间的线段所在的直线,作为每个异常区域的轴心直线;将所述延伸直线与所述轴心直线的夹角,作为每个异常区域的特征夹角;
9、根据异常区域的位置分布特征,得到每个异常区域的临近区域;将每个异常区域的临近区域的延伸直线作为临近直线;将与每个异常区域对应的延伸直线之间夹角小于或等于预设角度阈值的所有临近直线,作为每个异常区域的参考直线;将每个异常区域对应的参考直线与对应轴心直线之间的夹角,作为每个疑似缺陷的参考夹角;将每个异常区域的所有参考夹角和对应的特征夹角的角度均值,作为每个异常区域对应的修正夹角;将所述修正夹角的归一化值作为每个异常区域的角度特征符合程度。
10、进一步地,所述形状特征符合程度的获取方法包括:
11、对于任意一个异常区域:
12、过异常区域的质心,将对应的轴心直线向对应延伸直线的方向偏移对应的修正夹角后的直线,作为异常区域的修正直线;将过异常区域且与所述修正直线平行的直线作为遍历直线;将每条遍历直线与异常区域边缘的两个交点之间的直线段,作为每条遍历直线的参考线段;将异常区域内长度最长的参考线段,作为长度特征线段;将所述长度特征线段的长度,作为异常区域对应的长度特征值;
13、在异常区域内,过所述长度特征线段上每个像素点作与所述长度特征线段垂直的垂线,将每个像素点对应垂线在异常区域内的长度,作为每个像素点对应的局部宽度值;将所述长度特征线段上所有像素点的局部宽度值均值,作为异常区域对应的宽度特征值;将所述长度特征值和所述宽度特征值的比值,作为异常区域对应的长宽比特征值;
14、将所述修正直线远离风机轴心对应的方向作为修正方向;将长度特征线段上的像素点沿修正方向进行排列,得到对应的像素点序列;将像素点序列内每个像素点与下一个像素点之间局部宽度值的差值的均值绝对值,作为异常区域对应的宽度规律特征值;
15、根据所述长宽比特征值和所述宽度规律特征值,得到异常区域的形状特征符合程度,所述长宽比特征值与所述形状特征符合程度呈正相关,所述宽度规律特征值与所述形状特征符合程度呈正相关。
16、进一步地,所述纹理特征符合程度的获取方法包括:
17、对于任意一个异常区域:
18、在异常区域的长度特征线段与对应区域边界线的两个交点中,以靠近风机轴心的交点为起点,以所述起点外的另一个交点作为终点,沿异常区域边界得到两条边界曲线,将边界曲线上的像素点作为边界像素点;
19、根据每条边界曲线上的所有边界像素点的像素坐标进行曲线拟合,得到每条边界曲线对应的理论曲线,获取每条边界曲线上每个边界像素点在对应理论曲线上的理论像素坐标;将每个边界像素点的像素坐标与对应理论像素坐标之间的距离,作为每个边界像素点对应的距离残差;对每个边界像素点及其相邻的预设相邻数量个边界像素点对应的距离残差的平方的均值进行正相关映射,得到每个边界像素点的边界模糊程度;
20、在每条边界曲线上,将每个边界像素点与下一个边界像素点之间的边界模糊程度差值,作为每个边界像素点的模糊程度变化值;将每个边界像素点与下一个边界像素点之间的灰度值差值,作为每个边界像素点的灰度变化值;将每个像素点对应模糊程度变化值的归一化值与灰度变化值的归一化值的乘积,作为每个像素点的纹理变化值;将每条边界曲线上所有边界像素点的纹理变化值均值,作为每条边界曲线的纹理整体特征值;将两条边界曲线的纹理整体特征值的均值,作为异常区域的纹理特征符合程度。
21、进一步地,所述根据最终缺陷概率进行风机叶片表面缺陷视觉检测包括:
22、将最终缺陷概率大于预设缺陷阈值的异常区域,作为风机叶片表面的缺陷区域;根据所述缺陷区域进行风机叶片表面缺陷视觉检测。
23、进一步地,所述基准缺陷概率的获取方法包括:
24、计算每个异常区域中所有像素点的平均灰度值;获取每个异常区域对应的灰度值标准差;根据所述灰度值标准差和所述平均灰度值得到每个异常区域的基准缺陷概率,所述灰度值标准差和所述平均灰度值与所述基准缺陷概率均呈负相关。
25、进一步地,所述异常区域的获取方法包括:
26、对所述风机叶片的正视图灰度图像中像素点的灰度值通过最大类间方差方法,得到分割阈值;将风机叶片的正视图灰度图像中灰度值小于分割阈值的像素点组成的连通域,作为异常区域。
27、进一步地,所述临近区域的获取方法包括:
28、将任意两个异常区域对应质心之间的距离作为质心距离;将每个异常区域对应质心距离小于预设距离阈值的所有异常区域,作为每个异常区域对应的临近区域。
29、本发明具有如下有益效果:
30、考虑到缺陷区域的像素点相对于污渍区域,对应的灰度值相似且整体灰度值较低的特点,本发明首先计算出能够表征缺陷区域和污渍区域区别特征的基准缺陷概率。进一步根据污渍的形状可能受到风机叶片工作过程中的空气阻力和离心力的影响,在形状和延伸方向方面计算出能够表征缺陷区域和污渍区域区别特征的形状特征符合程度以及角度特征符合程度。进一步根据污渍区域中不同位置受到的空气阻力不同,且空气阻力大小会影响污渍区域边界的位置和像素点的灰度值的特点,计算出能够进一步区分出缺陷区域和污渍区域的纹理特征符合程度。最后综合缺陷区域和污渍区域在多个方向区别特征,得到每个异常区域的最终缺陷概率,使得对缺陷和污渍的区分更加准确,进一步使得对缺陷区域的检测更加准确。综上所述,本发明通过计算出的最终缺陷概率对风机叶片表面缺陷检测的准确度更高。
- 还没有人留言评论。精彩留言会获得点赞!