一种基于数字孪生的桥式行吊模型绑定方法、系统、装置与流程
本发明涉及数字孪生领域基于特定计算模型的计算机系统,具体为一种基于数字孪生的桥式行吊模型绑定方法、系统、装置。
背景技术:
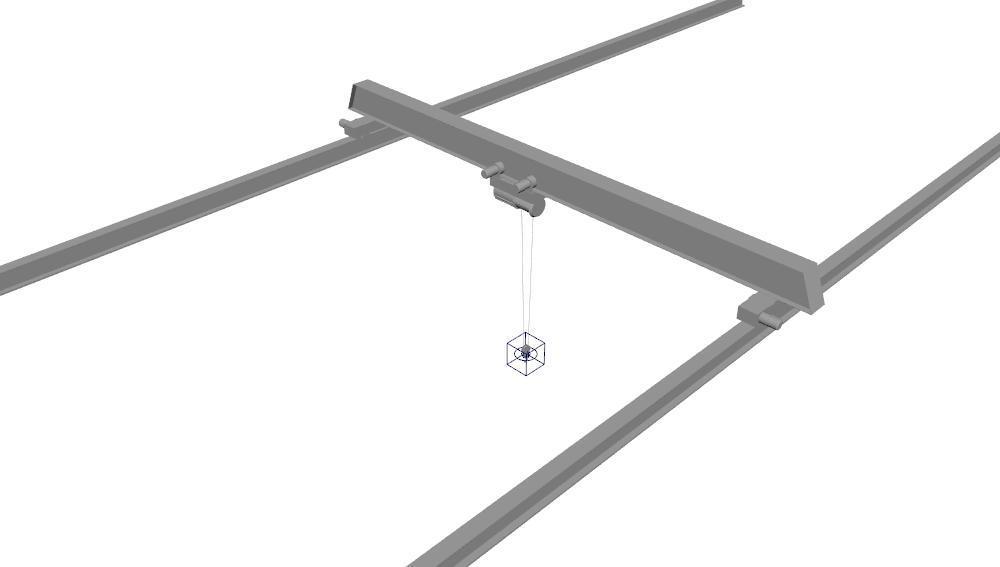
1、在数字孪生领域,桥式行吊是被各个行业经常用到的设备。在桥式行吊模型中,模型在进行动作模拟时,通常是在吊钩相关模型、小车移行机构相关模型、横梁相关模型处分别放置一个控制器,通过给三个控制分别进行操控,完成航吊的操作,航吊每执行一个动作需要分别给所有控制器进行动画key帧,容易产生错误,并且修改起来非常复杂与耗时。
2、如何使桥式行吊模型在进行动作模拟时,能够更加接近现实世界中的控制过程,使动作模拟能够一次控制完成,是需要解决的问题。
技术实现思路
1、本技术提供了一种单靠一个控制器就可以完成桥式行吊模型的所有动画的一种基于数字孪生的桥式行吊模型绑定方法。
2、本技术的技术方案如下:
3、本技术一方面提供一种基于数字孪生的桥式行吊模型绑定方法,应用于模拟桥式行吊设备的控制过程,包括以下步骤:
4、s1:创建以吊钩初始位置为原点的坐标系统;依据吊钩的位置创建一个组,在组内分别创建一个模型组用来存放桥式行吊的相关模型,创建一个骨骼组用来存放绑定绳索模型的骨骼,创建一个控制器组用来存放桥式行吊的控制器及若干控制代理器;
5、s2:按照需求创建用于存放模型用的组,并将模型放入相对应的模型组中:
6、s21:在模型组中创建横梁模型组,用于存放横梁模型,将横梁模型组放入正确的坐标位置,确定横梁模型的中心点坐标,使横梁模型组的y轴坐标吸附于横梁模型的中心点坐标的y轴坐标,在横梁模型组中创建小车移行机构模型组,用于存放小车移行机构的模型;
7、在模型组中创建吊钩模型组,用于存放吊钩模型;
8、在模型组中创建吊绳模型组,用于存放吊绳模型,
9、s22:将模型放入相对应的模型组中:将轨道模型放入模型组中,将横梁模型放入横梁模型组中,将小车移行机构的模型放入小车移行机构模型组中,将吊钩模型放入吊钩模型组中,将吊绳模型放入吊绳模型组中;
10、s3:创建骨骼,并对吊绳模型进行绑定蒙皮;
11、s4:依据吊钩模型组的位置在控制器组中创建位移控制代理器、吊钩控制代理器和控制器,所述控制器为主控制单元,所述位移控制代理器、吊钩控制代理器为与控制器绑定的从属控制单元,位移控制代理器、吊钩控制代理器和控制器分别吸附于吊钩模型组的位置,
12、s5:通过以下步骤设定绑定关系,通过控制器控制桥式行吊模型:
13、(1)使用位移控制代理器控制横梁模型组与小车移行机构的模型组,使横梁模型、小车移行机构的模型可以跟随位移控制代理器在x轴方向上进行同步移动;
14、(2)使用位移控制代理器控制小车移行机构的模型组,使小车移行机构的模型组可以跟随位移控制代理器在z轴方向上进行同步移动;
15、(3)使用吊钩控制代理器控制吊钩模型组,使吊钩模型组可以跟随吊钩控制代理器产生各方向上的同步位移与旋转;
16、(4)位移控制代理器对顶端骨骼进行点约束,使吊绳模型的顶端可以跟随位移控制代理器产生x轴与z轴方向上的同步移动;
17、(5)吊钩控制代理器对底端骨骼进行父子约束,使吊绳模型的底端可以跟随位移控制代理器进行同步位移与旋转;
18、(6)将控制器分别与位移控制代理器、吊钩控制代理器进行绑定,使得位移控制代理器可以跟随控制器产生各方向的同步位移,使得吊钩控制代理器可以跟随控制器产生各方向的同步位移与旋转。
19、优选s3中创建骨骼,并对吊绳相关模型进行绑定,具体操作为:
20、依据吊绳模型创建吊绳模型的顶端骨骼和吊绳模型的底端骨骼,通过蒙皮操作,所述吊绳模型的顶端骨骼控制吊绳模型的顶端,所述吊绳模型的底端骨骼控制吊绳模型的底端。
21、优选s4中将位移控制代理器、吊钩控制代理器和控制器分别吸附于吊钩模型组的位置,具体操作为:
22、将吊钩模型组分别与位移控制代理器、吊钩控制代理器、控制器分别做不保持偏移的父子约束的方式,使得位移控制代理器、吊钩控制代理器和控制器分别吸附于吊钩模型的位置,并冻结位移控制代理器、吊钩控制代理器和控制器的世界坐标。
23、优选s5中(1)、(2)具体包括以下步骤:
24、将位移控制代理器的x轴的值赋值给横梁模型组的x轴,使得横梁模型及小车移行机构的模型可以跟随位移控制代理器在x轴方向上进行同步移动;
25、将位移控制代理器的z轴的值赋值给小车移行机构模型组的z轴,使得小车移行机构的模型可以跟随位移控制代理器在z轴方向上进行同步移动。
26、优选s5中(4),具体包括以下步骤:
27、将位移控制代理器对吊绳模型的顶端骨骼的x轴与z轴进行点约束,使吊绳模型的顶端可以跟随位移控制代理器产生x轴与z轴方向上的同步移动。
28、优选s5中(3)、(5)具体包括以下步骤:
29、吊钩控制代理器对吊钩模型组进行父子约束,使得吊钩模型可以跟随吊钩控制代理器产生各方向上的同步位移与旋转;
30、吊钩控制代理器对吊绳模型的底端骨骼进行父子约束,使得吊绳模型的底端可以跟随位移控制代理器产生同步的位移与旋转。
31、优选s5中步骤(6)
32、将控制器分别与位移控制代理器、吊钩控制代理器进行绑定,使得位移控制代理器可以跟随控制器产生各方向的同步位移,使得吊钩控制代理器可以跟随控制器产生各方向的同步位移与旋转,具体操作为:
33、使用控制器对吊钩控制代理器进行父子约束,使得吊钩控制代理器跟随控制器产生各方向上的同步位移与旋转;
34、使用控制器对位移控制代理器进行点约束,使得位移控制代理器跟随控制器产生各方向上的同步位移。
35、本技术第二方面提供一种基于数字孪生的桥式行吊模型绑定系统,应用于模拟桥式行吊设备的控制过程,包括:
36、新的坐标系的构建模块:创建以吊钩初始位置为原点的坐标系统;依据吊钩的位置创建一个组,在组内分别创建一个模型组用来存放桥式行吊的相关模型,创建一个骨骼组用来存放绑定绳索模型的骨骼,创建一个控制器组用来存放桥式行吊的控制器及若干控制代理器。
37、分组模块:在模型组中创建横梁模型组,用于存放横梁模型。将横梁模型组放入正确的坐标位置,确定横梁模型的中心点坐标,使横梁模型组的y轴坐标吸附于横梁模型的中心点坐标的y轴坐标,在横梁模型组中创建小车移行机构模型组,用于存放小车移行机构的模型;
38、在模型组中创建吊钩模型组,用于存放吊钩模型;
39、在模型组中创建吊绳模型组,用于存放吊绳模型,
40、将轨道模型放入模型组中,将横梁模型放入横梁模型组中,将小车移行机构的模型放入小车移行机构模型组中,将吊钩模型放入吊钩模型组中,将吊绳模型放入吊绳模型组;
41、骨骼创建和绑定模块:创建骨骼,并对吊绳模型进行绑定蒙皮;
42、控制器创建模块:依据吊钩模型组的位置在控制器组中创建位移控制代理器、吊钩控制代理器和控制器,所述控制器为主控制单元,所述位移控制代理器、吊钩控制代理器为与控制器绑定的从属控制单元,位移控制代理器、吊钩控制代理器和控制器分别吸附于吊钩模型组的位置,
43、绑定控制模块:通过以下步骤设定绑定关系,通过控制器控制桥式行吊模型:
44、(1)使用位移控制代理器控制横梁模型组与小车移行机构的模型组,使横梁模型、小车移行机构的模型可以跟随位移控制代理器在x轴方向上进行同步移动;
45、(2)使用位移控制代理器控制小车移行机构的模型组,使小车移行机构的模型组可以跟随位移控制代理器在z轴方向上进行同步移动;
46、(3)使用吊钩控制代理器控制吊钩模型组,使吊钩模型组可以跟随吊钩控制代理器产生各方向上的同步位移与旋转;
47、(4)位移控制代理器对顶端骨骼进行点约束,使吊绳模型的顶端可以跟随位移控制代理器产生x轴与z轴方向上的同步移动;
48、(5)吊钩控制代理器对底端骨骼进行父子约束,使吊绳模型的底端可以跟随位移控制代理器进行同步位移与旋转;
49、(6)将控制器分别与位移控制代理器、吊钩控制代理器进行绑定,使得位移控制代理器可以跟随控制器产生各方向的同步位移,使得吊钩控制代理器可以跟随控制器产生各方向的同步位移与旋转。
50、所述的一种基于数字孪生的桥式行吊模型绑定系统,还包括控制器与代理器绑定模块:
51、用于使用控制器对吊钩控制代理器进行父子约束,使得吊钩控制代理器跟随控制器产生各方向上的同步位移与旋转;
52、用于使用控制器对位移控制代理器进行点约束,使得位移控制代理器跟随控制器产生各方向上的同步位移。
53、本技术第三方面提供一种基于数字孪生的桥式行吊模型绑定装置,包括处理器和存储器,其中,所述处理器执行所述存储器中保存的计算机程序时实现所述的一种基于数字孪生的桥式行吊模型绑定方法。
54、有益效果:本技术的基于数字孪生的桥式行吊模型构建方法,通过设置控制器、位移控制代理器、吊钩控制代理器及其形成的桥式行吊绑定方法,可以简化桥式行吊的动画制作流程,单靠一个控制器就可以完成行吊的所有动画;通过对模型分组及绑定的方式,简化控制过程,轻松控制桥式行吊的所有所有动态,有助于提升桥式行吊的动画制作速度,也简化了后期的修改步骤;使桥式行吊模型在进行动作模拟时,能够更加接近现实世界中的控制过程,使动作模拟能够一次控制完成。
- 还没有人留言评论。精彩留言会获得点赞!