一种基于循环自相关的空间目标RCS序列周期估计方法与流程
本发明涉及空间目标rcs序列周期估计领域,具体涉及一种基于循环自相关的空间目标rcs序列周期估计方法。
背景技术:
1、非受控的空间目标,在地球引力和摄动力的作用下进行复杂的旋转运动,最终会形成翻滚。因此翻滚周期可以表征空间目标的运动状态。从而高精度的翻滚周期估计可以作为判断空间目标的运动状态的重要依据。目前雷达是空间目标监测的主要设备,雷达获取的空间目标雷达散射截面积(radar cross section,rcs)序列是提取空间目标翻滚周期的主要数据源。因此通过rcs序列提取空间目标周期是实现空间目标状态估计的重要基础。
2、弹道中段目标rcs周期特性及其估计方法是与本文最相近似的实现方案,该方案主要是利用合成循环平均幅度差函数和循环自相关函数方法进行估计。但是该方案对提取周期估计精度没有进一步说明,对于出现虚假周期也未提出处理方案。因此在实际应用中该方案的应用存在较大的限制。
技术实现思路
1、本发明的目的在于提供一种空间目标翻滚周期估计的新方法,该方法主要对rcs序列进行形态学闭运算减小噪声影响,再对处理后的rcs序列进行经验模态分解,对分解得到的分组求出翻滚周期。解决如何实现空间目标rcs序列周期高精度提取的技术问题。
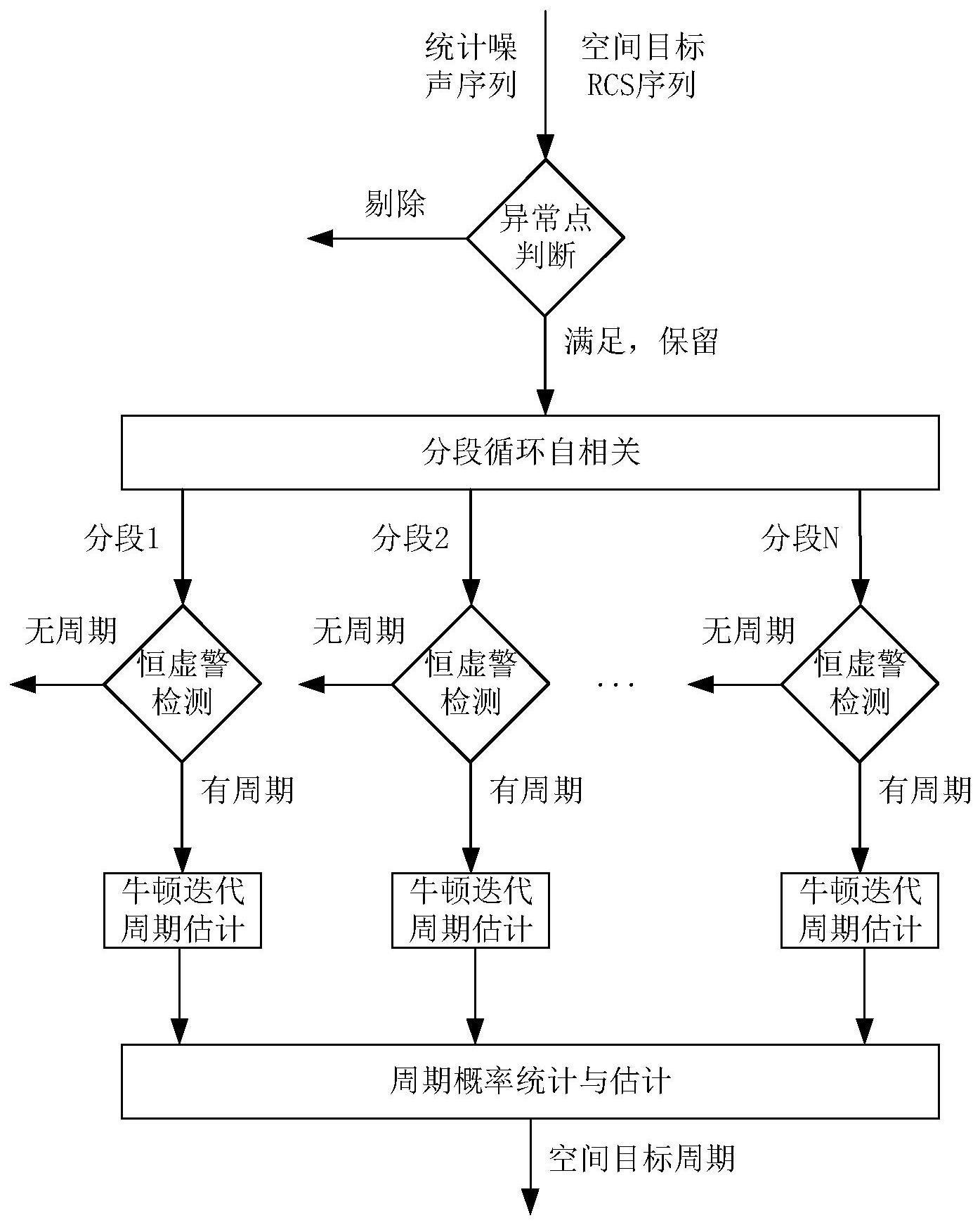
2、本发明提供一种基于循环自相关的空间目标rcs序列周期估计方法,包括以下步骤:
3、步骤s1:rcs异常点剔除;
4、假设空间目标rcs序列长度为n,序列中两个点的时间间隔为t,rcs序列为x=[x1,x2,…,xn],其中,[x1,x2,…,xn]为n个rcs点,n个所述rcs点对应的噪声功率为p=[p1,p2,…,pn];
5、一个序列周期内的n个所述rcs点对应的噪声功率的平均值为:
6、
7、将一个序列周期内的所有所述rcs点对应的噪声功率与进行对比,将所有所述rcs
8、点中,噪声功率大于的定义为rcs异常点;
9、若所述rcs异常点出现在雷达跟踪初始段或结束段,则直接剔除所述rcs异常点;若所述rcs异常点出现在跟踪段过程中,利用内插算法对所述rcs异常点进行恢复;得到rcs异常点剔除后的rcs序列;
10、步骤s2,将所述rcs异常点剔除后的rcs序列进行分段,通过分段循环自相关处理,得到每段的rcs序列数据循环自相关值,构成序列cs,在所述序列cs中,cs(m)为第m个循环自相关值;
11、步骤s3恒虚警检测:
12、计算所述序列cs中每个循环自相关值的平均循环自相关的噪声检测门限:基于所述噪声检测门限,筛选得到符合如下式所示条件的循环自相关值,作为通过恒虚警检测的循环自相关值;
13、步骤s4,二分法迭代周期估计:
14、对于步骤3中得到的通过恒虚警检测的第m个循环自相关值cs(m),
15、首先选择临近的9个点cs(m-4:m+4),令:
16、
17、其中a0与b0为进行二分法迭代的初始值,m1为cs(m+1)与cs(m-1)中最大值的下标值,具体按如下方式确定:
18、当cs(m+1)大于或等于cs(m-1)时,m1为m+1;当cs(m+1)小于cs(m-1)时,m1为m-1;
19、则进行第一次迭代有:
20、
21、其中a1与b1为第一次二分法迭代值,bmax为cs(a0)与cs(b0)中最大值的下标值;进行第二次迭代有:
22、
23、其中a2与b2为第二次二分法迭代值,bmax为cs(a1)与cs(b1)中最大值的下标值,且cs(a1)与cs(b1)可以通过sinc函数插值计算得到;则第三次次迭代有:
24、
25、其中a3与b3为第三次二分法迭代值,bmax为cs(a2)与cs(b2)最大值的下标值,且cs(a2)与cs(b2)可以通过sinc函数插值计算得到;假设迭代次数为e,最后输出的最大值点位置为:
26、
27、且对应的自相关函数值为:
28、
29、其中fmax表示cs(m)在第m个单元最大值点精确值,则对应的周期可按如下所示方式得到:
30、tcm=fmax*t (16)
31、步骤s5,周期概率统计与估计:
32、假设通过循环自相关函数总共估计出的目标有l个周期,且周期分别为[tc1,tc2,…,tcl],对应相关值为[csmax1,csmax2,…,csmaxl];对第ls个周期对应的相关值采用循环遍历统计:
33、
34、其中,代表ls个周期对应的相关值,
35、如果满足上式,则对应的自相关的周期数增加1,遍历完之后即可得到与第ls个周期自相关的周期的数量kls;从而[tc1,tc2,…,tcl]对应的自相关的周期数为[kc1,kc2,…,kcl],则目标最大周期为:
36、
37、其中lm对应[kc1,kc2,…,kcl]中最大值对应的下标;
38、作为优选,所述步骤s2,具体包括以下步骤:
39、对步骤1得到的所述rcs异常点剔除后的rcs序列,按照某个固定值ts进行划分区域,所述固定值ts指的是序列中划分的区域所包含的若干个点的时间长度,根据t与ts的关系求得序列对应的数据长度为:
40、
41、其中ns表示数据长度,ceil(*)表示向上取整处理;采用进行步进,则总数据段为:
42、
43、第k段的rcs序列数据xk为:
44、
45、上式可以进一步写成:
46、xk=[xk(1),xk(2),…,xk(ns)] (6)
47、第k段的rcs序列数据循环自相关函数为:
48、
49、对划分后的每个区域进行如式(3)-(7)所示的处理,得到每段的rcs序列数据循环自相关值,构成序列cs,在所述序列cs中,cs(m)为第m个循环自相关值;
50、作为优选,所述步骤s3,具体包括以下步骤:
51、按如下式所示的方法计算所述序列cs中每个循环自相关值的平均循环自相关的噪声检测门限:
52、
53、筛选得到符合如下式所示条件的循环自相关值,作为通过恒虚警检测的循环自相关值:
54、
55、其中sn为门限。
56、作为优选,所述步骤s3中,门限sn=1.1。
57、作为优选,所述步骤s4中,e=3。
58、作为优选,所述步骤s5中,当lm对应2个或2个以上相同最大值的klm时,则通过tclm对应的相关值进行判断,选相关值最大的对应的tclm作为最大周期tcmax。
59、本案技术方案相对现有技术的优点包括:
60、1)首先采用支撑区间进行异常点剔除,原有方法未提出;
61、2)采用了分段处理方式,提高了对旋转部件等空间目标周期提取的精度,原有方法未涉及;
62、3)采用恒虚警检测技术减小虚假点的影响,原有方法未涉及;
63、4)基于二分法迭代方式能够提高估计精度,原有方法未涉及;
64、5)剔除多区间周期估计结果融合提高测量精度,原有方法未涉及。
- 还没有人留言评论。精彩留言会获得点赞!