一种基于无网格RBF映射技术的土体液化大变形分析方法
本发明属于岩土工程数值分析方法,涉及一种基于无网格rbf映射技术的土体液化大变形分析方法。
背景技术:
1、大变形现象在岩土工程广泛存在,而其诱发的土体及构筑物破坏严重威胁人类的正常生活并造成不可估量的经济损失。土体在微观结构上具有孔隙和裂纹,在水位线下是典型的饱和多孔介质,在动荷载作用下,饱和土体孔隙水压力将急剧升高,造成土骨架有效应力降低甚至消失,进而诱发土体局部弱化-液化现象。实际震害表明土体液化大变形严重影响构筑物的安全运行:1995年阪神地震中日本神户码头置换砂土区和回填土区发生大规模液化,引发沉箱向前倾斜;lower san fernando土坝在1971年地震中,由于坝基交接面区域土体出现一定程度的液化,导致上游坝坡出现明显的滑动变形。因此土体液化大变形分析方法也一直是工程上数值模拟中热点课题之一,现阶段的液化分析方法主要关注土体的强度,无法满足工程上对其液化变形特性的迫切需求。同时岩土工程中的液化大变形问题往往涉及材料强非线性问题,也给现有液化大变形分析方法提出了更高的要求。
2、岩土工程中通常采用的有限元(fem)小变形分析方法,其发展成熟,计算稳定性高,但其在变形过程中未考虑模型几何形状、土体应力状态及孔压信息在空间上的改变,难以真实再现土体液化的发展过程。早期岩土工程中的大变形分析方法主要是基于网格并在拉格朗日框架下开发,包括:完全拉格朗日法(tl)和更新拉格朗日法(ul)。其凭借自身对本构模型良好的适应性和易于捕捉求解域边界并施加表面荷载的优势,得到了广泛的应用。但tl/ul方法在大变形过程中网格可能发生畸变,进而影响模拟精度甚至造成无法求解的现象,因此逐步被基于任意拉格朗日-欧拉框架(ale)的ritss法和耦合欧拉-拉格朗日法(cel)代替。ritss法在标准fem小变形分析基础上,引入网格重剖分过程及变量映射技术,成功模拟了大变形问题,但ritss法在不断的重剖分及映射过程可能出现剖分失败或误差累积的问题;相比于ritss法,cel采用参考点代替材料点,保证了初始网格在变形过程中固定不变,但由于内置于商用程序,其自身难以深度二次开发且仅支持总应力分析,无法满足土体液化大变形分析需求。目前尚无关于ritss和cel在地震液化大变形模拟的研究成果。
3、在基于网格的大变形模拟方法发展的同时,另一类基于节点的大变形方法也取得了长足的进步,其中最具代表性就是无网格法(mfm),并根据离散平衡方程的方式不同可进一步分为:光滑粒子流动力学法(sph)、无单元伽辽金法(efgm)和径向点插值法(rpim)。此类方法摆脱fem中插值、积分对单元的依赖,本质上回避了网格畸变的问题,在大变形中有着天然的优势。但上述无网格类大变形方法主要是在ul/tl框架下开展稳定性较差,另外相较于基于网格的分析方法,无网格法计算效率较低的不足制约了其在实际工程中的应用。同时还有一类介于基于网格和基于节点间的大变形分析方法,如:物质点法(mpm),其采用背景网格点代替节点建立平衡方程,并采用物质点代替高斯点进行数值积分,成功解决了大变形问题。但该方法在数值流程与有限元相差较大,难以实现高效的耦合分析,无法充分利用fem程序中先进的计算方法及丰富的材料本构库。
技术实现思路
1、针对上述分析方法的缺陷,本发明的目的在于提供了一种基于无网格rbf映射技术的土体液化大变形分析方法。本发明在任意拉格朗日-欧拉框架下实现,并建立了无网格-有限元耦合大变形分析方法。本发明解决了基于单元的大变形方法精度受制于网格质量的难题,为模拟土体液化大变形问题提供有力的技术手段。
2、为达到以上目的,本发明采取的技术方案为:
3、一种基于无网格rbf映射技术的土体液化大变形分析方法,包括以下步骤:
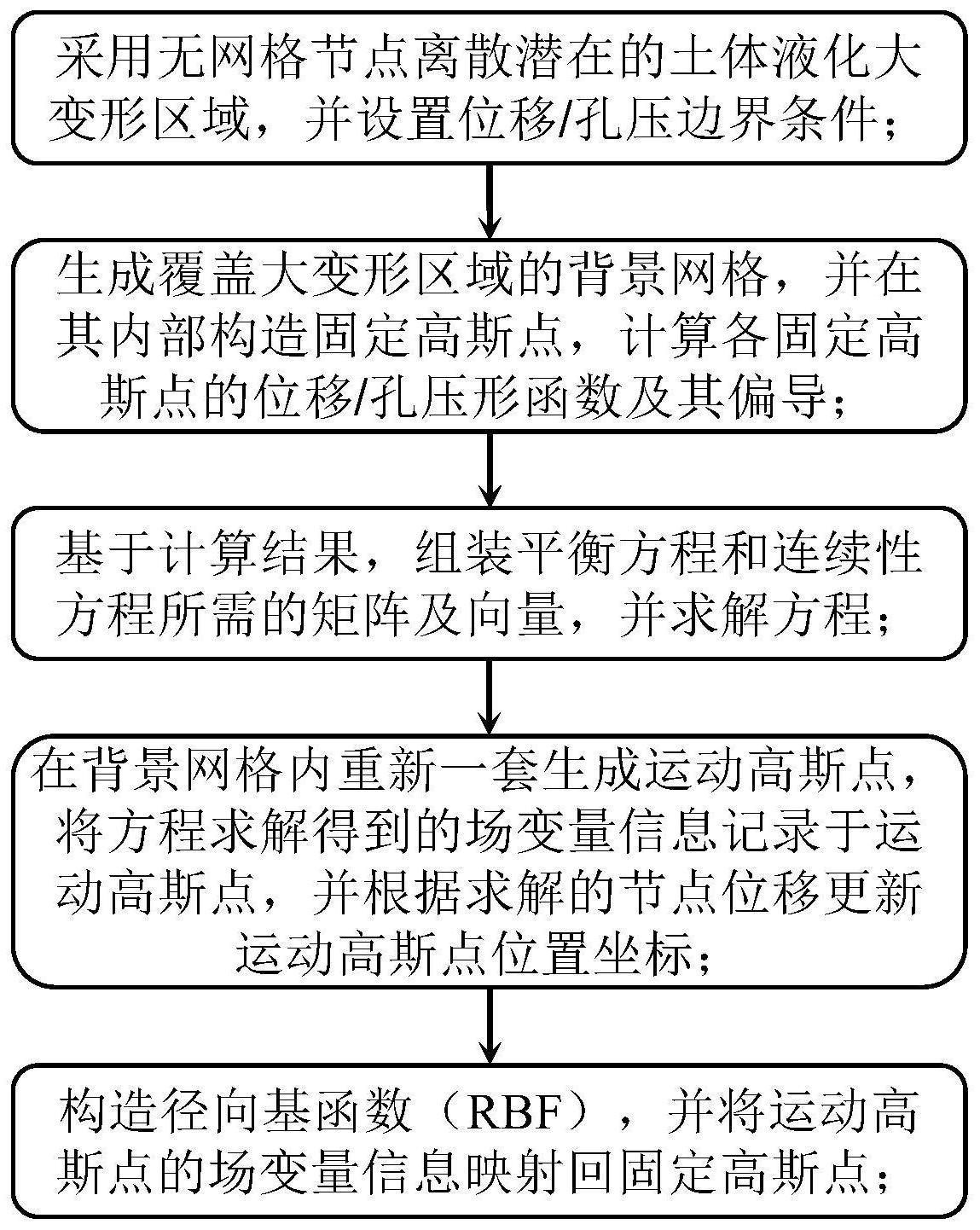
4、s1,采用无网格节点离散潜在的土体液化大变形区域,并设置位移/孔压边界条件;
5、s2,生成覆盖步骤s1中大变形区域的背景网格,并在其内部构造固定高斯点,计算各固定高斯点的位移/孔压形函数及其偏导;
6、s3,基于步骤s2的计算结果,组装平衡方程和连续性方程所需的矩阵及向量,并求解方程;
7、s4,在背景网格内重新生成一套运动高斯点,将步骤s3中方程求解得到场变量信息记录于运动高斯点,并根据求解的节点位移更新运动高斯点位置坐标;
8、s5,构造径向基函数(rbf),并将步骤s4中运动高斯点的场变量信息映射回固定高斯点,实现大变形过程中土体应力状态及孔压在空间上的重新分布。
9、进一步,需预估所述步骤s1中大变形区域的初始及变形后的位置,从而保证步骤s2中背景网格可始终覆盖该区域,本发明中采用矩形背景网格,并在内部生成2×2个固定高斯点,各高斯点坐标按下式计算:
10、
11、
12、
13、
14、式中,(xgi,k,ygi,k)表示在第k个背景网格内各固定高斯点位置坐标,(xbi,k,ybi,k)表示第k个背景网格角点坐标。
15、进一步,所述步骤s3中平衡方程及连续性方程可由相应的向量和矩阵表示:
16、
17、
18、式中,u分别表示节点的加速度、速度及位移矩阵,节点的p分别表示孔压及其对时间的一阶导数矩阵,m,k,c,qfs(qsf),s,h分别为由步骤s2中各固定高斯点的位移/孔压形函数及其偏导计算得到的质量矩阵、整体刚度矩阵、阻尼矩阵、流固耦合矩阵,渗流矩阵和压缩矩阵,f,ff表示固体及流体外力向量。
19、进一步,所述步骤s5在每一荷载步中具体包括以下步骤:
20、s51,计算各固定高斯点间平均距离,并以此作为其支持域半径;
21、s52,计算固定高斯点与运动高斯点间距离,并根据其s51中支持域半径的大小关系,判断固定高斯点支持域内运动高斯点个数;
22、s53,基于s52中支持域内运动高斯点,计算rbf映射函数,并通过映射函数将s4中记录的运动高斯点场变量信息传递给固定高斯点;
23、s54,将运动高斯点复位;
24、s55,若当前荷载步为最后一步则结束计算,否则循环s51-s54过程。
25、更进一步,所述步骤s53中rbf映射函数按下式计算:
26、
27、r(r)ij=(rij+cdav)q
28、
29、式中,r(r),p(x)分别为径向基矩阵和线性附加基矩阵,ai,bj为代求常数,n为固定高斯点支持域内运动高斯点个数(等于径向基矩阵维数),m为线性附加基矩阵维数,本项目中m=3附加基矩阵为[1,x,y],dav为固定高斯点平均间距,rij表示固定高斯点与某运动高斯点间距,c,q为形函数形状参数,上式的矩阵表达式为:
30、
31、进一步,本发明数值实现流程与有限元基本一致,可通过共用节点的方式在矩阵的层次上实现与有限元法的无缝耦合,进而建立无网格-有限元耦合大变形分析方法,极大拓展了该方法的应用范围,并弥补自身计算效率较低的不足。
32、更进一步,无网格-有限元耦合大变形分析方法的刚度矩阵及外力向量可表示为:
33、
34、
35、式中,下标couple表示耦合矩阵或向量,ω1,ω2分别为模型无网格区域和有限元区域。
36、本发明“基于无网格rbf映射技术的土体液化大变形分析方法”协同发挥了任意拉格朗日-欧拉框架在大变形分析中精度、稳定性的优势及无网格法无需单元拓扑的特点,建立了饱和土体有效应力-孔隙水压力耦合大变形分析方法,并基于c++语言及面向对象的程序设计方法,实现了与有限元的耦合分析。本发明解决了基于单元的大变形方法精度受制于网格质量的难题,为模拟土体液化大变形问题提供有力的技术手段。
37、与现有技术相比,本项目有以下优势:
38、(1)该方法在任意拉格朗日-欧拉框架下实现,在大变形分析中有着较高的精度及稳定性;
39、(2)无需单元拓扑信息,解决了基于单元的大变形方法精度受制于网格质量的难题;
40、(3)该方法对土体弹塑性本构模型有着良好的适用性,能更有效地捕捉地震作用下土体液化变形等复杂力学行为;
41、(4)基于无网格rbf映射技术,考虑了液化变形过程中土体应力状态及孔压在空间上的重新分布,更真实、合理地模拟土体液化发展过程;
42、(5)数值实现流程与有限元基本一致,便于与有限元耦合分析,极大拓展了该方法的应用范围,并弥补自身计算效率较低的不足。
- 还没有人留言评论。精彩留言会获得点赞!