道路积水识别方法、系统、终端及存储介质与流程
本发明属于目标识别,具体涉及一种道路积水识别方法、系统、终端及存储介质。
背景技术:
1、道路积水是影响交通安全的不利因素。因为道路积水导致的事故越来越多,道路积水会导致交通中断,严重时会导致交通瘫痪,发生严重的交通事故。
2、目前道路积水检测方法主要采用目标检测或者图像处理的方法,图像处理方法例如采用神经网络模型进行图像识别,这种方式需要对视频解码后转入图像处理模块,而图像处理过程耗时较多,导致滞后性严重。而目标检测方法(如yolov算法)相对来说精度不高,尤其容易将反光误报成道路积水。
技术实现思路
1、针对现有技术存在的目标检测方法无法排除反光对道路积水识别的干扰,本发明提供一种道路积水识别方法、系统、终端及存储介质,以解决上述技术问题。
2、第一方面,本发明提供一种道路积水识别方法,包括:
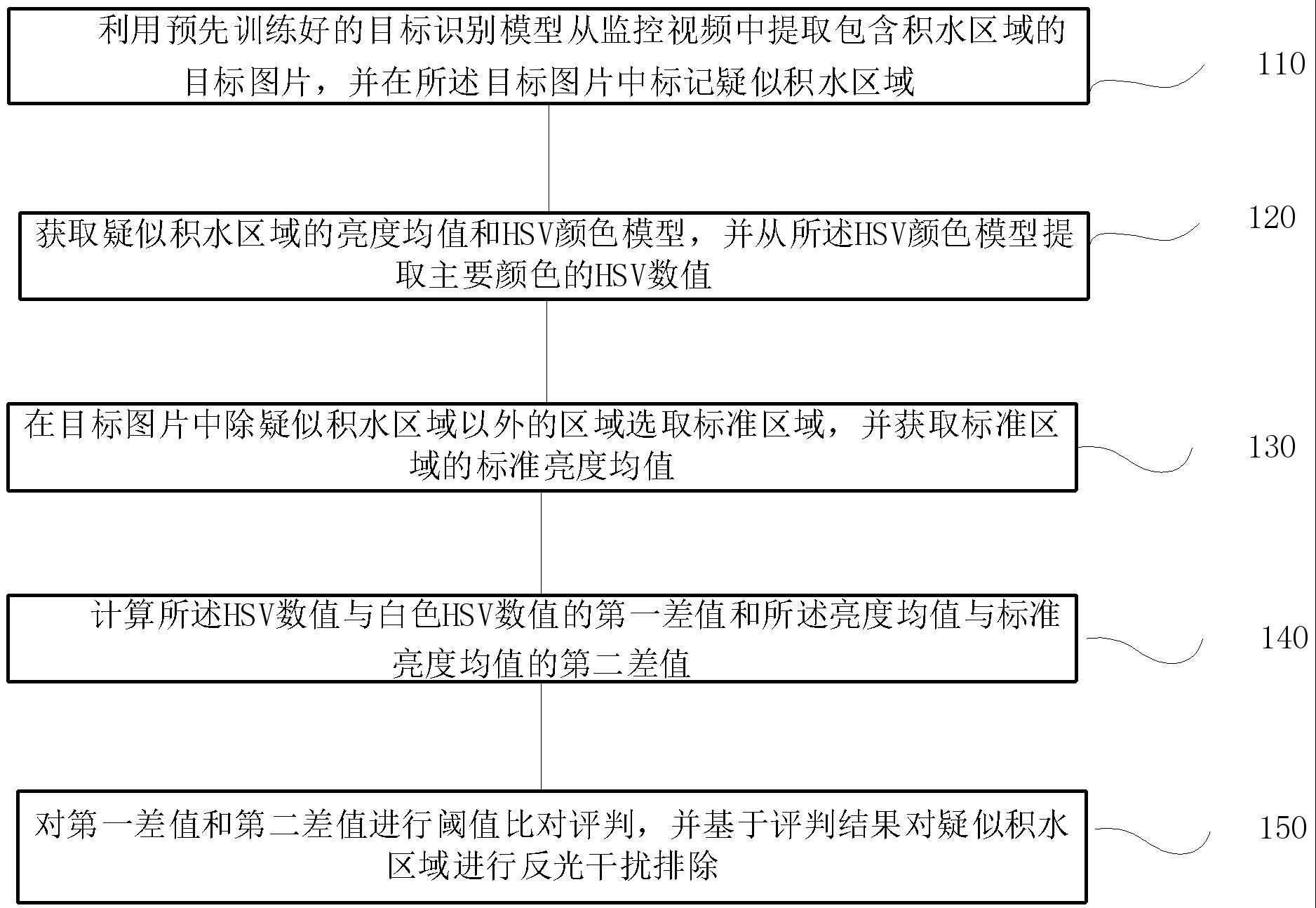
3、利用预先训练好的目标识别模型从监控视频中提取包含积水区域的目标图片,并在所述目标图片中标记疑似积水区域;
4、获取疑似积水区域的亮度均值和hsv颜色模型,并从所述hsv颜色模型提取主要颜色的hsv数值;
5、在目标图片中除疑似积水区域以外的区域选取标准区域,并获取标准区域的标准亮度均值;
6、计算所述hsv数值与白色hsv数值的第一差值和所述亮度均值与标准亮度均值的第二差值;
7、对第一差值和第二差值进行阈值比对评判,并基于评判结果对疑似积水区域进行反光干扰排除。
8、在一个可选的实施方式中,利用预先训练好的目标识别模型从监控视频中提取包含积水区域的目标图片,并在所述目标图片中标记疑似积水区域,包括:
9、从摄像机拉取监控视频流;
10、对监控视频流进行解码,从监控视频流中截取图像帧,得到样本集合;
11、利用批量处理脚本将样本集合批量输入至预先训练好的yolov5模型,得到标记有疑似积水区域的目标图片。
12、在一个可选的实施方式中,在目标图片中除疑似积水区域以外的区域选取标准区域,并获取标准区域的标准亮度均值,包括:
13、预先设定最小距离和最大距离;
14、为疑似积水区域生成中心点;
15、在疑似积水区域边缘选取多个特征点;
16、基于最小距离,在目标图片中以中心点为基准,分别为多个特征点对应生成多个第一特征点,第一特征点到中心点的距离与对应特征点到中心点的距离的差值为最小距离;
17、基于最大距离,在目标图片中以中心点为基准,分别为多个特征点对应生成多个第二特征点,第二特征点到中心点的距离与对应特征点到中心点的距离的差值为最大距离;
18、依次连接多个第一特征点得到第一边缘线,依次连接多个第二特征点得到第二边缘线,将第一边缘线与第二边缘线围成的环形区域作为标准区域;
19、计算标准区域的亮度均值作为标准亮度均值。
20、在一个可选的实施方式中,对第一差值和第二差值进行阈值比对评判,并基于评判结果对疑似积水区域进行反光干扰排除,包括:
21、预先设定第一阈值和第二阈值;
22、若第一差值超过第一阈值且第二差值不超过第二阈值,则判定疑似积水区域为积水区域,并生成积水报警事件;
23、若第一差值未超过第一阈值或第二差值超过第二阈值,则判定疑似积水区域为反光区域。
24、第二方面,本发明提供一种道路积水识别系统,包括:
25、目标识别模块,用于利用预先训练好的目标识别模型从监控视频中提取包含积水区域的目标图片,并在所述目标图片中标记疑似积水区域;
26、参数获取模块,用于获取疑似积水区域的亮度均值和hsv颜色模型,并从所述hsv颜色模型提取主要颜色的hsv数值;
27、标准获取模块,用于在目标图片中除疑似积水区域以外的区域选取标准区域,并获取标准区域的标准亮度均值;
28、差值计算模块,用于计算所述hsv数值与白色hsv数值的第一差值和所述亮度均值与标准亮度均值的第二差值;
29、干扰排除模块,用于对第一差值和第二差值进行阈值比对评判,并基于评判结果对疑似积水区域进行反光干扰排除。
30、在一个可选的实施方式中,所述目标识别模块包括:
31、视频拉取单元,用于从摄像机拉取监控视频流;
32、批量处理单元,用于对监控视频流进行解码,从监控视频流中截取图像帧,得到样本集合;
33、模型识别单元,用于利用批量处理脚本将样本集合批量输入至预先训练好的yolov5模型,得到标记有疑似积水区域的目标图片。
34、在一个可选的实施方式中,所述标准获取模块包括:
35、距离设置单元,用于预先设定最小距离和最大距离;
36、中心生成单元,用于为疑似积水区域生成中心点;
37、特征选取单元,用于在疑似积水区域边缘选取多个特征点;
38、第一选点单元,用于基于最小距离,在目标图片中以中心点为基准,分别为多个特征点对应生成多个第一特征点,第一特征点到中心点的距离与对应特征点到中心点的距离的差值为最小距离;
39、第二选点单元,用于基于最大距离,在目标图片中以中心点为基准,分别为多个特征点对应生成多个第二特征点,第二特征点到中心点的距离与对应特征点到中心点的距离的差值为最大距离;
40、区域绘制单元,用于依次连接多个第一特征点得到第一边缘线,依次连接多个第二特征点得到第二边缘线,将第一边缘线与第二边缘线围成的环形区域作为标准区域;
41、亮度计算单元,用于计算标准区域的亮度均值作为标准亮度均值。
42、在一个可选的实施方式中,所述干扰排除模块包括:
43、阈值设置单元,用于预先设定第一阈值和第二阈值;
44、第一判定单元,用于若第一差值超过第一阈值且第二差值不超过第二阈值,则判定疑似积水区域为积水区域,并生成积水报警事件;
45、第二判定单元,用于若第一差值未超过第一阈值或第二差值超过第二阈值,则判定疑似积水区域为反光区域。
46、第三方面,提供一种终端,包括:
47、处理器、存储器,其中,
48、该存储器用于存储计算机程序,
49、该处理器用于从存储器中调用并运行该计算机程序,使得终端执行上述的终端的方法。
50、第四方面,提供了一种计算机存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述各方面所述的方法。
51、本发明的有益效果在于,本发明提供的道路积水识别方法、系统、终端及存储介质,在目标检测算法的识别基础上,基于亮度和hsv数值的比对,实现对反光现象的排除。本发明能够在保证积水识别速度不大幅降低的同时,有效提升识别结果的准确度。
52、此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!