一种激光扫描点云标靶球的自动识别方法及系统与流程
本发明涉及目标自动识别的,特别涉及一种激光扫描点云标靶球的自动识别方法及系统。
背景技术:
1、激光扫描技术是一种通过使用激光器发射激光束,并利用光电传感器接收反射回来的激光来测量物体表面形状、大小、位置等信息的技术,激光扫描技术可以精确地捕捉物体表面的三维坐标数据,用于生成高精度的点云模型或三维重建,因此,在激光扫描过程中,点云数据的准确性和可靠性至关重要。
2、目前,点云标靶球的识别方法主要有基于点云直接搜索标靶球、基于反射强度进行标靶球的识别提取和基于rgb信息进行标靶球的提取识别三种方法;基于点云直接搜索标靶球方法是通过分析点云数据中的几何形状和特征来判断是否存在标靶球,并进行自动提取,但提取效率较低,不稳定且容易受到场景干扰的影响;基于反射强度进行标靶球的识别提取方法是利用激光扫描仪获取到的反射强度信息,通过分析点云数据中的强度分布特征来判断是否存在标靶球,并进行自动提取,但该方法存在一些数据无反射强度信息的情况,或者在部分场景下反射强度信息对比不明显导致识别结果不准确;基于rgb信息进行标靶球的提取识别方法是利用激光扫描仪采集到的点云数据中的rgb颜色信息,通过分析颜色特征来判断是否存在标靶球,并进行自动提取,但该方法有时候会遇到一些数据无rgb信息的情况,或者无法满足拍摄条件,从而影响标靶球的提取和识别准确性。
3、现有技术公开了一种地面三维激光扫描点云球面目标自动识别方法,首先将激光扫描仪扫描的原始数据在三维极坐标信息转换为三维直角坐标信息的过程中,保留其极坐标信息中距离、角度信息,然后利用角度、距离、灰度信息实现球面类目标的快速粗识别,然后再根据其三维直角坐标进行球面目标的数据进行拟合,结合点云拟合球之后的公差判断目标是否是真正的一个球,以及其标准差、球面半径、球心等信息,但在粗识别过程中利用角度、距离、灰度信息来判断球面类目标,一方面,这种搜索方法对于复杂的目标形状或者背景干扰的情况不够准确,导致目标识别准确度降低,产生错误的识别结果;另一方面,由于角度、距离、灰度信息复杂,导致目标搜索速度慢,即判断速度慢,
技术实现思路
1、为解决现有激光扫描点云球面目标自动识别方法中目标识别准确度低和目标搜索速度慢的问题,本发明提出一种激光扫描点云标靶球的自动识别方法及系统,有效提高了目标识别准确度和目标搜索速度。
2、为了达到上述技术效果,本发明的技术方案如下:
3、一种激光扫描点云标靶球的自动识别方法,包括以下步骤:
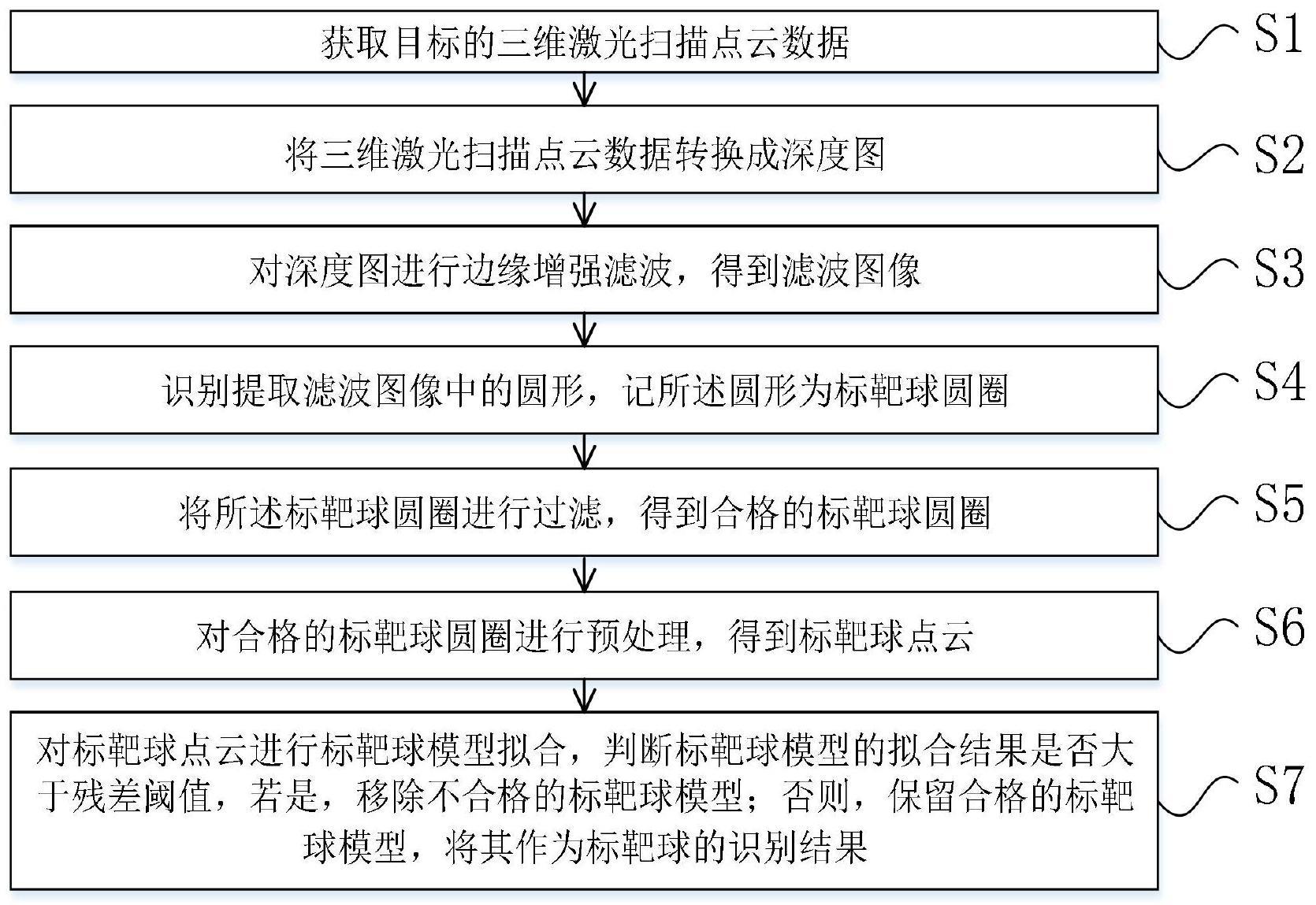
4、s1.获取目标的三维激光扫描点云数据;
5、s2.将三维激光扫描点云数据转换成深度图;
6、s3.对深度图进行边缘增强滤波,得到滤波图像;
7、s4.识别提取滤波图像中的圆形,记所述圆形为标靶球圆圈;
8、s5.将所述标靶球圆圈进行过滤,得到合格的标靶球圆圈;
9、s6.对合格的标靶球圆圈进行预处理,得到标靶球点云;
10、s7.对标靶球点云进行标靶球模型拟合,判断标靶球模型的拟合结果是否大于残差阈值,若是,移除不合格的标靶球模型;否则,保留合格的标靶球模型,将其作为标靶球的识别结果。
11、优选地,所述将三维激光扫描点云数据转换成深度图,具体过程包括:
12、s21.选择测站中心的位置为参考点,计算三维激光扫描点云数据中的每个点到测站中心的距离;
13、s22.计算三维激光扫描点云数据中的每个点到测站中心的水平角和俯仰角;
14、s23.将三维激光扫描点云数据中的每个点到测站中心的距离、水平角和俯仰角进行组合,得到三维激光扫描点云数据中的每个点的深度信息,生成深度图p。
15、优选地,所述对深度图进行边缘增强滤波,具体过程包括:
16、s31.将深度图进行拉普拉斯变换,生成边缘增强的图像;
17、s32.对边缘增强的图像进行高斯滤波,然后利用canny算子对高斯滤波后的图像进行边缘检测,生成滤波图像。
18、优选地,所述识别提取滤波图像中的圆形,具体过程包括:通过霍夫变换在滤波图像中进行圆形的识别提取,得到第一圆形集合y,记第一圆形集合y中的圆形为标靶球圆圈,圆形的半径为标靶球圆圈的半径rt0。
19、优选地,将所述标靶球圆圈进行过滤,具体过程包括:
20、s51.通过标靶球圆圈内的圆心像素点坐标,在深度图p中获取该圆心像素点的深度值,将获取到的深度值转换标靶球表面点到测站中心的距离l0;
21、s52.根据距离l0,计算标靶球的球心到测站中心的距离l,具体计算公式如下:
22、l=lo+r
23、其中,r表示目标标靶球球半径;
24、s53.根据标靶球的球心到测站中心的距离l和标靶球圆圈内的圆心像素点坐标,计算标靶球的球心的三维坐标pmc;
25、s54.在深度图p中计算球心在三维坐标pmc处的标靶球的理论像素半径rt1;
26、s55.判断rt0和rt1的差值是否大于半径阈值,若是,则记当前半径rt0的标靶球圆圈为不合格的标靶球圆圈,在第一圆形集合y中过滤掉不合格的标靶球圆圈;否则,记当前半径rt0的标靶球圆圈为合格的标靶球圆圈,将合格的标靶球圆圈保留,生成第二圆形集合y0。
27、优选地,对合格的标靶球圆圈进行预处理,具体过程包括:
28、s61.在所述第二圆形集合y0中,将第二圆形集合y0中的每个标靶球圆圈内的圆心像素点坐标转换成标靶球的球心的三维坐标pmc;
29、s62.将s61所述标靶球的球心的三维坐标pmc记为标靶球点云,利用标靶球点云组成标靶球点云集合pc。
30、优选地,所述对标靶球点云进行标靶球模型拟合,判断标靶球模型的拟合结果是否大于残差阈值,具体过程包括:
31、s71.根据靶球点云集合pc中的每个标靶球的球心的三维坐标pmc和每个标靶球球半径r,构建标靶球模型;
32、s72.计算靶球点云集合pc中的标靶球点云上的每个点,到点对应的标靶球模型表面的距离残差rms,记距离残差rms为拟合结果;
33、s73.判断距离残差rms是否大于残差阈值,若是,则标靶球模型的拟合结果大于残差阈值,在第二圆形集合y0移除不合格的标靶球模型;否则,在第二圆形集合y0留下合格的标靶球模型,将其作为标靶球的识别结果。
34、优选地,所述三维激光扫描点云数据是通过三维激光扫描仪扫描目标获得。
35、本发明还提出了一种激光扫描点云标靶球的自动识别系统,所述系统包括:
36、获取模块,用于获取目标的三维激光扫描点云数据;
37、转换模块,用于将三维激光扫描点云数据转换成深度图;
38、增强滤波模块,用于对深度图进行边缘增强滤波,得到滤波图像;
39、识别提取模块,用于识别提取滤波图像中的圆形,记所述圆形为标靶球圆圈;
40、过滤模块,用于将所述标靶球圆圈进行过滤,得到合格的标靶球圆圈;
41、预处理模块,用于对合格的标靶球圆圈进行预处理,得到标靶球点云;
42、判断模块,用于对标靶球点云进行标靶球模型拟合,判断标靶球模型的拟合结果是否大于残差阈值,若是,移除不合格的标靶球模型;否则,保留合格的标靶球模型,将其作为标靶球的识别结果。
43、优选地,一种计算机设备,其特征在于,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
44、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行如所述的激光扫描点云标靶球的自动识别方法的操作。
45、与现有技术相比,本发明技术方案的有益效果是:
46、本发明提出一种激光扫描点云标靶球的自动识别方法及系统,首先获取目标的三维激光扫描点云数据,将三维激光扫描点云数据转换成深度图,对深度图进行边缘增强滤波,得到滤波图像,目的是通过点云数据换算的深度图进行标靶球的粗提取,减少了场景干扰等外部环境的干扰,然后识别提取滤波图像中的圆形,将所述标靶球圆圈进行过滤,对过滤后合格的标靶球圆圈进行预处理,最后对预处理得到的标靶球点云进行拟合,根据拟合结果筛选出合格的标靶球模型,以完成目标标靶球识别,拟合出来的标靶球模型鲁棒性高。本发明通过点云数据转换成的深度图的粗提取方法,并结合边缘增强滤波、识别提取、过滤、预处理和模型拟合的过程,移除不合格的标靶球模型,提高了目标识别准确度和目标搜索速度,增强标靶球模型的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!