基于相关系数和改进沙猫群算法的基坑变形预测评估方法与流程
本发明涉及基坑变形预测,尤其涉及基于相关系数和改进沙猫群算法的基坑变形预测评估方法。
背景技术:
1、随着经济社会的快速发展,各类用途的地下空间已在各大中城市中得到开发利用,基坑的规模呈现出深、大、复杂的特点。
2、但是伴随着地下空间的开发,常常对周围环境造成一定的影响,极端情况会对周边环境造成较大的破坏。因此,在地下空间开发过程中,对其进行智能监测预测评估,对识别施工过程中的隐患,指导设计和施工具有重大意义。
3、基坑监测技术和变形预测是保障基坑工程施工安全的重要举措。现阶段常见的基坑变形监测预测方式多采用时间序列预测方法,及根据现场实测数据建立训练集生成预测模型,对基坑后续变形发展进行预测的方式,此方法生成的预测模型较为简单,由于训练集仅由已有的变形进行学习,导致预测模型误差较大,无法较准确的预测基坑变形发展情况,往往无法指导设计和施工。
4、基于上述原因,本发明公开基于相关系数和改进沙猫群算法的基坑变形预测评估方法
技术实现思路
1、本发明的目的是为了提供基于相关系数和改进沙猫群算法的基坑变形预测评估方法,可有效解决现有预测模型误差较大,无法较准确的预测基坑变形发展情况的问题,从基坑自身特性出发,分析基坑变形同基坑特性之间的内在规律,对导致基坑变形的各因素进行相关性研究建立起合适的变形预测模型,来反映基坑真实的变形情况和预测基坑未来的变形趋势,具有较高的准确性,具体采用技术方案如下:
2、包括以下步骤:
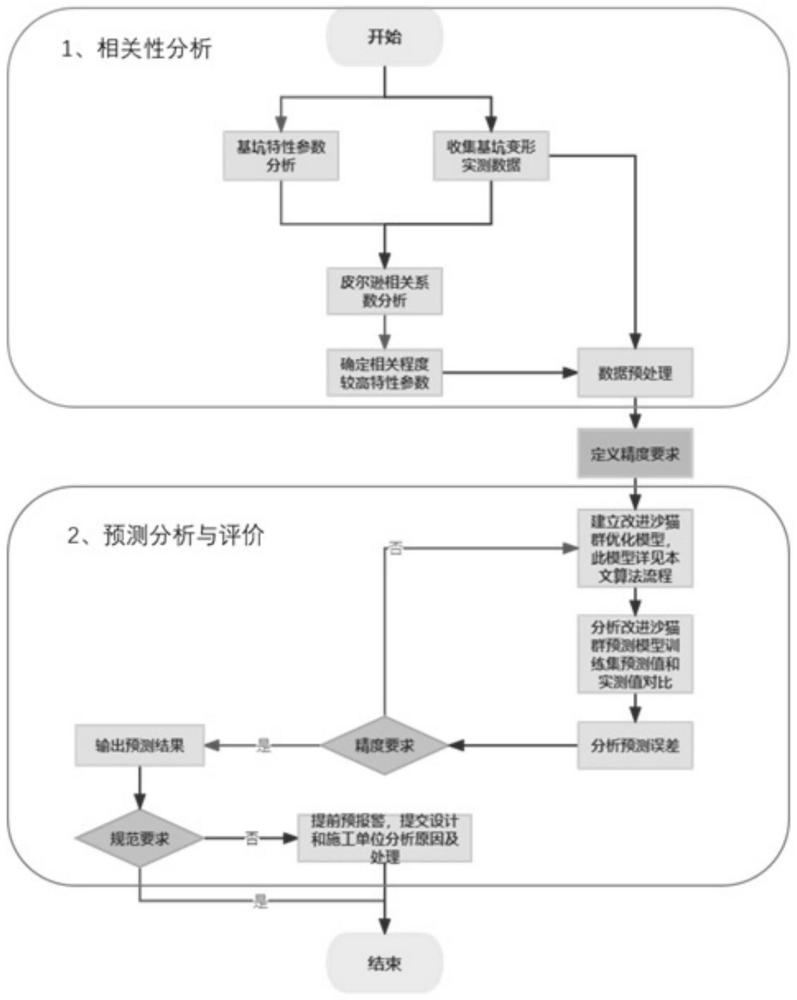
3、s1、相关性分析,所述相关性分析根据基坑工程监测基坑变形实测数据和基坑特性参数建立相关性分析模型,依据皮尔逊相关系数分析基坑特性与基坑变形的相关性程度,选择相关性程度较高的前4组因素与基坑变形实测数据进行数据预处理,并提出预测精度要求;
4、s2、预测分析与评价,所述预测分析与评价以上述s1步骤中所述预处理后的数据中相关性影响因素为输入层,基坑变形作为输出层进行训练,分析训练集预测结果和实测结果误差,依据基坑特性对基坑变形进行预测,根据预测结果对基坑进行评估。
5、进一步的,所述步骤s1中基坑特性的参数包括开挖深度、开挖时间、支撑轴力、开挖深度范围内土层内摩擦角、粘聚力、重度、基坑内外水位高差。
6、进一步的,所述步骤s2的具体步骤包括:
7、s21、基坑实测数据、基坑特性参数分析;
8、s22、根据相关性分析部分分析基坑变形实测数据和基坑特性参数之间的相关程度;
9、s23、对基坑变形实测数据、基坑特性参数进行预处理,基坑特性参数作为输入层,基坑变形实测数据作为输出层,对上述预处理后数据划分训练集和输出集;
10、s24、建立游走策略改进沙猫群算法模型;
11、s25、根据训练集预测模型与基坑变形实测数据进行对比分析,分析误差,确定是否满足预测准确性要求;
12、s26、对测试集进行分析,预测基坑变形发展;
13、s27、根据预测结果对基坑变形进行评估。
14、进一步的,所述步骤s22通过皮尔逊相关系数定义基坑各个特性参数与基坑变形实测数据之间的相关程度,通过计算基坑各个特性参数与基坑变形实测数据之间的协方差和标准差的商:
15、
16、其中ρ(x,y)为两个变量之间的总体的皮尔逊相关系数,x为基坑特征参数,y为基坑变形实测数据;
17、判断对于预测工况下,基坑特征参数x同基坑变形实测数据y相关程度,选取相关程度较高的前4种基坑特性参数。
18、进一步的,所述步骤s23对相关性程度较高的前4组因素与基坑变形实测数据进行数据预处理,生成输入层矩阵:
19、
20、
21、上述式中:fitness为适应度函数。
22、进一步的,上述步骤s24根据游走策略改进沙猫群算法,评估输入层参数的适应度函数,得到参数的最佳值,输入层数据中每层xij都会输出对应x1,当一次迭代完成时,选择最好的解决方案,如果在之前的迭代中没有理想模型,和其他层数据在下一次迭代中,试着朝理想模型的方向移动,每次迭代中的最佳解可以代表预测值越接近基坑变形实测数据,具体如下:
23、pos(t+1)=r(posbc(t)-rand(0,1)*posc (t))
24、上述式中:posbc为最优位置(1)、posc为自己当前位置,r为灵敏度范围,输入层根据最优解、当前位置以及灵敏度范围来更新自己的位置,搜索到其他可能的最好的输出层,可以在新的搜索区域中找到新的局部最优。
25、进一步的,r为灵敏度范围,基坑特性参数的灵敏度范围各不相同,具体算法为:
26、
27、r=2*rg*rand(0,1)-rg
28、r=rg*rand(0,1)
29、其中sm为基坑特性参数特征值,t为当前迭代次数,t为最大迭代次数,r控制探索阶段和开发阶段之间转换。基坑特性参数特征值根据现场实测数据进行总结所得。
30、进一步的,pos(t+1)表示最佳位置与当前位置之间的距离,如下
31、posrnd=|rand(0,1)*posb(t)-posc(t)|
32、pos(t+1)=posb(t)-r*posrnd*cos(α)
33、式中:posb为最优位置(2);posc为当前位置;posrnd为随机位置,α为随机角度且α通过轮盘赌法进行选择。
34、进一步的,为了更好的扩大模型训练集预测范围及提高收敛速度,引入游走策略,引入游走策略包括透镜成像反向学习、带权重游走、三角形游走;
35、其中透镜成像反向学习通过凸透镜成像的原理生成一个反向位置来扩大搜索范围,避免陷入局部最优,又能扩大搜索范围,提高种群多样性,具体为在二维坐标中x的取值范围为(a,b),y表示凸透镜,已知a(x,y),其中x为基坑特征参数,y为基坑变形实测数据。
36、在x轴的投影为x,在y轴的投影为h,通过透镜成像反向学习得到a*(x′,y′),其中,在x轴的投影为x*,在y轴的投影为h*;
37、由透镜成像原理可得:
38、
39、令可得:
40、
41、其中为个体在第j维空间的位置,为xj为的反向解,aj和bj为搜索空间中第j维的最大边界和最小边界;
42、其中带权重游走可规定下一步迭代位置的加权值,用于控制收敛的速度,具体为前4种基坑特性参数适应度函数分别为f1,f2,f3,f4。
43、为加快预测模型整体收敛速度,引入动态权重w1,w2,w3。
44、
45、
46、
47、τ随机取值为f1,f2,f3,f4且τ不取max(fi)、min(fi)。
48、
49、引入权重后游走,加大了迭代过程中基坑特性参数中对基坑变形影响适应度较大参数的作用,调整后
50、posnew=posb(t)+(posb(t)-posc(t))*w
51、posb为最优位置;posc为当前位置;posnew为引入权重后最优位置;
52、其中三角形游走是在迭代更新位置过程中在周围进行游走。
53、l1=posb(t)-posc(t)
54、l2=l2*rand(0,1)
55、其中,l1为x与y之间的距离,x为基坑特征参数,y为基坑变形实测数据,l2为游走步长。
56、确定游走方向其中适用于本项目的游走方向
57、通过定义的三角形游走后所得
58、posnew=posb(t)+p*r
59、其中,p为通过三角形游走后x与y之间的距离,x为基坑特征参数,y为基坑变形实测数据,定义为
60、进一步的,判定寻优终止条件,判断迭代次数是否达到最大或全局最优位置的适应度值是否满足适应度值的设定值,若满足即参数优化算法结束,否则重新进行训练寻优;
61、进一步的,测试集预测结果根据《建筑基坑支护技术规程》、《建筑基坑工程监测技术标准》及当地规范进行判定,判断未来一段时间内基坑的变形情况,从而对基坑支护结构安全性进行评估。
62、本发明的有益效果:本方法根据基坑变形实测数据和基坑特性参数建立相关性分析模型,依据皮尔逊相关系数分析基坑特性与基坑变形的相关性程度,选择相关性程度较高的前4组因素与基坑变形实测数据进行数据预处理,并提出预测精度要求。将处理后数据中相关性影响因素作为输入层,基坑变形作为输出层进行训练,分析训练集预测结果和实测结果误差,依据基坑特性对基坑变形进行预测,根据预测结果从而对基坑支护结构安全性进行评估,可有效解决现有预测模型误差较大,无法较准确的预测基坑变形发展情况的问题。
- 还没有人留言评论。精彩留言会获得点赞!