地图道路数据生成模型训练方法、相关方法和装置及设备与流程
本发明涉及地图处理,尤其涉及一种地图道路数据生成模型训练方法、相关方法和装置及设备。
背景技术:
1、随着智能交通和自动驾驶领域的迅速发展,对地图的要求已经超越了传统导航电子地图所能提供的内容、精度和完整性。为了满足这种高级应用需求,针对道路的高精度地图逐渐兴起并广受认可。在自动驾驶系统中,高精度地图具备地图匹配、辅助环境感知和路径规划等三大关键功能,这些功能是刚性需求且无法被其他替代方案取代的优势。高精度地图的引入为自动驾驶的安全性和可行性提供了重要的支持。
2、众包地图生成是一种基于众包模式来收集、整理和更新地理信息数据的方法。借助广大的网络用户,以众包的方式参与地图数据的创建和更新工作。通过众包模式,可以快速获取实时的道路状况、交通标识和其他地理特征数据。利用众包模式的协作和共享精神,以大众的力量构建更新更快、更全面、更准确的地图,以满足智能交通和自动驾驶系统对高清地图的需求。
3、为了得到高精度地图,一般需要对众包地图的多趟地图要素矢量数据进行处理,得到满足高精度地图生成需求的地图几何矢量数据。
技术实现思路
1、为了生成稳定的高精度地图,本发明实施例提供了一种地图道路数据生成模型训练方法、相关方法和装置及设备。
2、第一方面,本技术实施例提供一种地图道路数据生成模型训练方法,该方法包括:
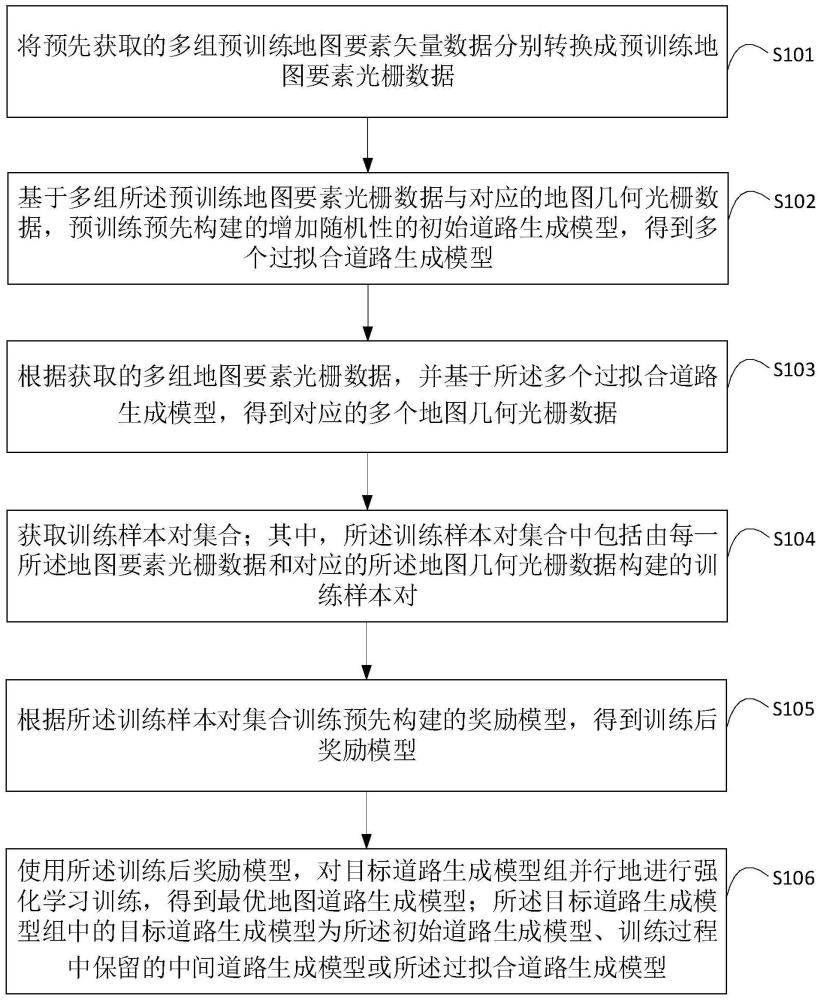
3、将预先获取的多组预训练地图要素矢量数据分别转换成预训练地图要素光栅数据;
4、基于多组所述预训练地图要素光栅数据与对应的地图几何光栅数据,预训练预先构建的增加随机性的初始道路生成模型,得到多个过拟合道路生成模型;
5、根据获取的多组地图要素光栅数据,并基于所述多个过拟合道路生成模型,得到对应的多个地图几何光栅数据;
6、获取训练样本对集合;其中,所述训练样本对集合中包括由每一所述地图要素光栅数据和对应的所述地图几何光栅数据构建的训练样本对;
7、根据所述训练样本对集合训练预先构建的奖励模型,得到训练后奖励模型;
8、使用所述训练后奖励模型,对目标道路生成模型组并行地进行强化学习训练,得到最优地图道路生成模型;所述目标道路生成模型组中的目标道路生成模型为所述初始道路生成模型、训练过程中保留的中间道路生成模型或所述过拟合道路生成模型。
9、本技术实施例的一个或一些可选的实施方式中,所述训练样本对集合中还包括基于多组地图要素光栅数据和对应标注得到的地图几何光栅数据构建的训练样本对,和/或,基于多组预先获取的地图道路数据和对应生成的地图几何光栅数据构建的训练样本对;
10、在根据所述训练样本对集合训练预先构建的奖励模型,得到训练后奖励模型之前,所述方法还包括:
11、对所述训练样本对集合中各训练样本对进行排名,得到各训练样本的排序结果;
12、根据所述各训练样本的排序结果,通过归一化得到所述各训练样本的奖励分数。
13、本技术实施例的一个或一些可选的实施方式中,所述根据所述训练样本对集合训练预先构建的奖励模型,得到训练后奖励模型,包括:
14、根据所述训练样本对集合中各所述训练样本对和其对应的奖励分数训练所述奖励模型,得到所述训练后奖励模型。
15、本技术实施例的一个或一些可选的实施方式中,所述基于多组所述预训练地图要素光栅数据与对应的地图几何光栅数据,预训练预先构建的增加随机性的初始道路生成模型,得到多个过拟合道路生成模型,包括:
16、获取基于每组所述预训练地图要素光栅数据标注得到的地图几何光栅数据;
17、将多组所述预训练地图要素光栅数据与对应的所述地图几何光栅数据划分为训练集与测试集;
18、在预设道路生成网络模型中增加随机输入,构建得到所述初始道路生成模型;
19、将所述训练集输入所述初始道路生成模型,最小化所述初始道路生成模型的损失函数,计算得到训练集准确率,并得到训练后初始道路生成模型;
20、将所述测试集输入所述训练后初始道路生成模型,计算得到测试集准确率;
21、重复执行训练所述初始道路生成模型的步骤,直至所述训练集准确率与测试集准确率满足预设过拟合条件,并在训练过程中保留不同的训练后道路生成模型,得到所述多个过拟合道路生成模型。
22、本技术实施例的一个或一些可选的实施方式中,所述重复执行训练所述初始道路生成模型的步骤,直至所述训练集准确率与测试集准确率满足预设过拟合条件,并在训练过程中保留不同的训练后道路生成模型,得到所述多个过拟合道路生成模型,包括;
23、重复执行训练所述初始道路生成模型的步骤,直至所述训练集准确率大于第一预设阈值,同时测试集准确率小于第二预设阈值,在此后的训练过程中每隔第三预设阈值的迭代次数便保留一次训练后道路生成模型,得到所述多个过拟合道路生成模型。
24、本技术实施例的一个或一些可选的实施方式中,所述使用所述训练后奖励模型,对目标道路生成模型组并行地进行强化学习训练,得到最优地图道路生成模型,包括:
25、将获取的目标地图要素光栅数据输入每个所述目标道路生成模型,基于所述训练后奖励模型,使用策略梯度算法对所述目标道路生成模型进行优化,得到对应的优化道路生成模型;
26、重复上述每个优化道路生成模型的步骤,直至分别达到预设条件,得到多个强化后地图道路生成模型;
27、从所述多个强化后道路生成模型中筛选得到最优地图道路生成模型。
28、本技术实施例的一个或一些可选的实施方式中,所述将获取的目标地图要素光栅数据输入每个所述目标道路生成模型,基于所述训练后奖励模型,使用策略梯度算法对所述目标道路生成模型进行优化,得到对应的优化道路生成模型,包括:
29、根据新获取的地图要素矢量数据生成所述目标地图要素光栅数据;
30、针对每一所述目标道路生成模型,将所述目标地图要素光栅数据输入所述目标道路生成模型,得到目标地图几何光栅数据;
31、基于所述训练后奖励模型评估所述目标地图要素光栅数据和所述目标地图几何光栅数据的奖励分数;
32、根据所述奖励分数,更新所述目标道路生成模型的参数,得到对应的所述优化道路生成模型。
33、本技术实施例的一个或一些可选的实施方式中,所述从所述多个强化后道路生成模型中筛选得到最优地图道路生成模型,包括:
34、使用所述目标地图要素光栅数据分别测试所述多个强化后道路生成模型,筛选得到最优地图道路生成模型。
35、本技术实施例的一个或一些可选的实施方式中,还包括:
36、若使用所述目标地图要素光栅数据测试最优地图道路生成模型的测试结果未满足预设要求,则重新执行上述强化学习训练的步骤;或者,
37、若使用所述目标地图要素光栅数据测试最优地图道路生成模型的测试结果未满足预设要求,且得到人为确定所述最优地图道路生成模型质量不合格的结果时,则重新获取新的地图要素光栅数据和对应标注的地图几何光栅数据,重新执行上述预训练道路生成模型的步骤,得到新的多个过拟合道路生成模型,和/或,获取新的训练样本对,重新执行上述的训练奖励模型的步骤,得到新的奖励模型。
38、第二方面,本技术实施例提供一种道路几何矢量地图的生成方法,该方法包括:
39、获取基于一种地图道路数据生成模型训练方法所得到的地图道路生成模型;
40、将待处理地图要素矢量数据转换成地图要素光栅数据并输入所述地图道路生成模型,得到对应的地图几何光栅数据;
41、将所述地图几何光栅数据转换为地图几何矢量数据。
42、第三方面,本技术实施例提供一种高精度地图的生成方法,该方法包括:
43、获取基于一种地图道路数据生成模型训练方法所得到的地图道路生成模型;
44、将待处理地图要素矢量数据转换成地图要素光栅数据并输入所述地图道路生成模型,得到对应的地图几何光栅数据;
45、将所述地图几何光栅数据转换为地图几何矢量数据。
46、根据所述地图几何矢量数据,生成高精度地图。
47、第四方面,本技术实施例提供一种地图道路数据生成模型训练装置,该装置包括:
48、第一转换模块,用于将预先获取的多组预训练地图要素矢量数据分别转换成预训练地图要素光栅数据;
49、第一训练模块,用于基于多组所述预训练地图要素光栅数据与对应的地图几何光栅数据,预训练预先构建的增加随机性的初始道路生成模型,得到多个过拟合道路生成模型;
50、第一生成模块,用于根据获取的多组地图要素光栅数据,并基于所述多个过拟合道路生成模型,得到对应的多个地图几何光栅数据;
51、第一获取模块,用于获取训练样本对集合;其中,所述训练样本对集合中包括由每一所述地图要素光栅数据和对应的所述地图几何光栅数据构建的训练样本对;
52、第二训练模块,用于根据所述训练样本对集合训练预先构建的奖励模型,得到训练后奖励模型;
53、第三训练模块,用于使用所述训练后奖励模型,对目标道路生成模型组并行地进行强化学习训练,得到最优地图道路生成模型;所述目标道路生成模型组中的目标道路生成模型为所述初始道路生成模型、训练过程中保留的中间道路生成模型或所述过拟合道路生成模型。
54、第五方面,本技术实施例提供一种道路几何矢量地图的生成装置,该装置包括:
55、第二获取模块,用于获取基于一种地图道路数据生成模型训练装置所得到的地图道路生成模型;
56、第二生成模块,用于将待处理地图要素矢量数据转换成地图要素光栅数据,并输入所述地图道路生成模型,得到对应的地图几何光栅数据;
57、第二转换模块,用于将所述地图几何光栅数据转换为地图几何矢量数据。
58、第六方面,本技术实施例提供一种高精度地图的生成装置,该装置包括:
59、第二获取模块,用于获取基于地图道路数据生成模型训练装置所得到的地图道路生成模型;
60、第二生成模块,用于将待处理地图要素矢量数据转换成地图要素光栅数据,并输入所述地图道路生成模型,得到对应的地图几何光栅数据;
61、第二转换模块,用于将所述地图几何光栅数据转换为地图几何矢量数据;
62、第三生成模块,用于根据所述地图几何矢量数据,生成高精度地图。
63、第七方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述的地图道路数据生成模型训练方法,和/或,上述的地图几何矢量数据生成方法,和/或,上述的高精度地图的生成方法。
64、第八方面,本技术实施例提供一种计算机设备,包括存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的地图道路数据生成模型训练方法,和/或,上述的地图几何矢量数据生成方法,和/或,上述的高精度地图的生成方法。
65、第九方面,本技术实施例提供一种包含指令的计算机程序产品,当计算机程序产品在计算机设备上运行时,使得计算机设备执行如上述的地图道路数据生成模型训练方法,和/或,上述的地图几何矢量数据生成方法,和/或,上述的高精度地图的生成方法。
66、第十方面,本技术实施例提供一种芯片,芯片包括处理器和通信接口,通信接口和处理器耦合,处理器用于运行计算机程序或指令,以实现如上述的地图道路数据生成模型训练方法,和/或,上述的地图几何矢量数据生成方法,和/或,上述的高精度地图的生成方法。
67、本发明实施例提供的上述技术方案的有益效果至少包括:
68、本技术实施例提供的地图道路数据生成模型训练方法,通过预训练多个过拟合模型,实现地图道路数据生成模型在少量训练数据的情况下进行训练,实现在少量训练数据情况下的快速学习,并且通过对模型增加随机性的方式,保证训练过程中模型的泛化性,并通过构建包括地图要素光栅数据和对应的地图几何光栅数据的训练样本对来训练奖励模型,基于强化学习训练的方式,可以根据人为反馈对模型训练的过程进行优化,目标道路生成模型组的不同目标道路生成模型可以分布式并行训练,提高模型训练效率,实现快速迭代训练,从训练后的多个模型中筛选得到最佳的地图道路生成模型,有利于提高地图道路生成模型的精度,得到符合质量要求的地图几何光栅数据,进而得到质量更高的地图几何矢量数据,用于生成高精度地图。
69、本技术实施例提供的地图道路数据生成模型训练方法,通过获取不同类型的地图道路数量数据得到对应的地图几何光栅数据,来构建训练样本对,根据训练样本对的地图几何光栅数据进行排名,经过归一化得到奖励分数,再训练奖励模型,使得训练后奖励模型对于地图几何光栅数据的评分更高,从而使得强化学习训练中能够尽快得到最优地图道路生成模型。
70、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!