一种OCT图像分割方法及装置与流程
本发明涉及图像处理,更具体的,涉及一种oct图像分割方法及装置。
背景技术:
1、光学相干断层扫描技术(optical coherence tomography,简称 oct)是近年来发展较快的一种新型层析成像技术,利用弱相干光干涉仪的基本原理,检测生物组织不同深度层面对入射弱相干光的背向反射或几次散射信号,通过扫描,可得到生物组织二维或三维结构图像,广泛应用于生物组织活体检测,如眼后段结构的查看、轴向断层以及测量。
2、为了提供更加准确的影像依据,需要对三维oct数据中的每一帧图像进行分割。目前oct图像分割方法对每一帧图像都采用相同的方法进行分割,由于每一帧的图像质量不同,可能导致连续两帧图像的分割结果存在较大波动,整体分割结果准确性较低。
技术实现思路
1、有鉴于此,本发明提供了一种oct图像分割方法及装置,有效提高了oct图像分割的准确性,同时提高了oct图像的整体分割处理速度。
2、为了实现上述发明目的,本发明提供的具体技术方案如下:
3、第一方面,本发明实施例提供了一种oct图像分割方法,包括:
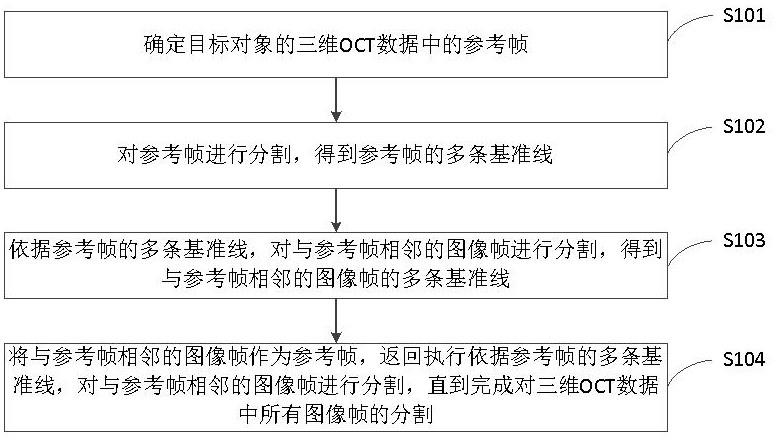
4、确定目标对象的三维oct数据中的参考帧;
5、对所述参考帧进行分割,得到所述参考帧的多条基准线;
6、依据所述参考帧的多条基准线,对与所述参考帧相邻的图像帧进行分割,得到与所述参考帧相邻的图像帧的多条基准线;
7、将与所述参考帧相邻的图像帧作为所述参考帧,返回执行依据所述参考帧的多条基准线,对与所述参考帧相邻的图像帧进行分割,直到完成对所述三维oct数据中所有图像帧的分割。
8、在一些实施例中,若所述目标对象为视网膜,对所述参考帧进行分割,得到所述参考帧的多条基准线,包括:
9、对所述参考帧的内界膜ilm进行分割,得到对应的基准线;
10、对所述参考帧的光感受器细胞外节os上表面分界线进行分割,得到对应的基准线;
11、根据所述ilm对应的基准线对所述参考帧中与所述ilm相关联的分界线进行分割,得到对应的基准线;
12、根据所述os上表面分界线对应的基准线对所述参考帧中与所述os上表面分界线相关联的分界线进行分割,得到对应的基准线。
13、在一些实施例中,对所述参考帧的内界膜ilm进行分割,得到对应的基准线,包括:
14、对所述参考帧依次进行阈值化处理和过滤处理,得到二值化图像;
15、针对所述二值化图像中的每一列,从上到下进行遍历,直到遍历到第一个不为0的点停止,得到每一列第一个不为0的点,获得第一向量,并对所述第一向量进行平滑优化处理;
16、在所述参考帧中裁剪以所述第一向量中的各个点为中心点、预设第一上下高度范围内的图像,得到参考图像;
17、利用最短路径寻找算法在参考图像中寻找最短路径;
18、根据所述最短路径,确定所述ilm对应的基准线。
19、在一些实施例中,对所述参考帧的os上表面分界线进行分割,得到对应的基准线,包括:
20、对所述参考帧进行滤波处理,针对所述参考帧的每一列,从所述ilm对应的基准线向下遍历,得到每一列最亮的点;
21、从每一列最亮的点中确定多段由连续点组成的有效线段,得到由有效线段中的点组成的第二向量,并对所述第二向量进行平滑优化处理;
22、在所述参考帧中裁剪以所述第二向量中的各个点为中心点、预设第二上下高度范围内的图像,得到参考图像;
23、利用最短路径寻找算法在参考图像中寻找最短路径;
24、根据所述最短路径,确定所述os上表面分界线对应的基准线。
25、在一些实施例中,根据所述最短路径,确定所述os上表面分界线对应的基准线,包括:
26、将所述最短路径的坐标转换为所述参考帧中的坐标,得到第三向量;
27、对所述第三向量中的点进行拟合,得到每个点拟合后的y坐标;
28、将拟合后的y坐标与拟合前的y坐标之间差值的绝对值小于误差值的点组成第四向量;
29、对所述第四向量中的点进行再次拟合,得到每个点再次拟合后的y坐标;
30、针对所述第四向量中的每个点,若再次拟合后的y坐标与再次拟合前的y坐标之间差值的绝对值大于误差值,将该点的y坐标替换为再次拟合后的y坐标;
31、若所述第四向量中存在缺失点,将所述缺失点的y坐标置为0,并将所述缺失点的坐标添加到所述第四向量中的相应位置中,得到所述os上表面分界线对应的基准线。
32、在一些实施例中,所述根据所述ilm对应的基准线对所述参考帧中与所述ilm相关联的分界线进行分割,得到对应的基准线,包括:
33、在所述参考帧中裁剪所述ilm对应的基准线下方第一预设区域内的图像,得到第一预设区域对应的参考图像;
34、利用最短路径寻找算法在参考图像中寻找最短路径;
35、根据第一预设区域对应的最短路径,确定内核层inl与外丛状层opl之间的分界线对应的基准线;
36、在所述参考帧中裁剪所述inl与所述opl之间的分界线对应的基准线上方第二预设区域内的图像,得到第二预设区域对应的参考图像,并在所述参考帧中裁剪所述inl与所述opl之间的分界线对应的基准线下方第三预设区域内的图像,得到第三预设区域对应的参考图像;
37、利用最短路径寻找算法在参考图像中寻找最短路径;
38、根据第二预设区域对应的最短路径,确定内丛状层ipl与所述inl之间的分界线对应的基准线,并根据第三预设区域对应的最短路径,确定所述opl与外核层onl之间的分界线对应的基准线。
39、在一些实施例中,所述根据所述os上表面分界线对应的基准线对所述参考帧中与所述os上表面分界线相关联的分界线进行分割,得到对应的基准线,包括:
40、在所述参考帧中裁剪所述os上表面分界线对应的基准线下方第四预设区域内的图像,得到第四预设区域对应的参考图像;
41、利用最短路径寻找算法在参考图像中寻找最短路径;
42、根据第四预设区域对应的最短路径,确定rpe下表面对应的基准线;
43、在所述参考帧中裁剪所述os上表面分界线对应的基准线上方第五预设区域内的图像,得到第五预设区域对应的参考图像;
44、利用最短路径寻找算法在参考图像中寻找最短路径;
45、根据第五预设区域对应的最短路径,确定椭圆体带ez上表面分界线对应的基准线;
46、在所述参考帧中裁剪所述ez上表面对应的基准线与所述os上表面分界线之间第六预设区域内的图像,得到第六预设区域对应的参考图像,在所述参考帧中裁剪所述ez上表面对应的基准线上方第七预设区域内的图像,得到第七预设区域对应的参考图像,并在所述参考帧中裁剪所述ez上表面对应的基准线上方第八预设区域内的图像,得到第八预设区域对应的参考图像;
47、利用最短路径寻找算法在参考图像中寻找最短路径;
48、根据第六预设区域对应的最短路径,确定所述ez下表面分界线对应的基准线,根据第七预设区域对应的最短路径,确定外界膜elm上表面分界线对应的基准线,根据第八预设区域对应的最短路径,确定所述elm下表面分界线对应的基准线。
49、在一些实施例中,依据所述参考帧的多条基准线,对与所述参考帧相邻的图像帧进行分割,得到与所述参考帧相邻的图像帧的多条基准线,包括:
50、在所述参考帧中分别裁剪以每条基准线为中心,对应基准线预设上下高度范围内的图像,得到每条基准线对应的第一配准图像;
51、针对每条基准线,分别采用不同的修正系数对基准线进行修正,在与所述参考帧相邻的图像帧中裁剪以修正后的基准线为中心,对应基准线预设上下高度范围内的图像,得到不同修正系数下修正后的基准线对应的第二配准图像;
52、针对每条基准线,分别计算不同修正系数下的所述第一配准图像与所述第二配准图像的归一化互相关系数,将最大归一化互相关系数对应的修正系数确定为目标修正系数,并将所述目标修正系数对应的第二配准图像确定为待处理图像;
53、对所述待处理图像进行预设优化处理,得到参考图像;
54、利用最短路径寻找算法在参考图像中寻找最短路径;
55、分别根据每条最短路径,确定与所述参考帧相邻的图像帧的多条基准线。
56、在一些实施例中,在针对每条基准线,分别计算不同修正系数下的所述第一配准图像与所述第二配准图像的归一化互相关系数之后,所述方法还包括:
57、判断最大归一化互相关系数是否小于阈值;
58、若最大归一化互相关系数不小于阈值,执行将最大归一化互相关系数对应的修正系数确定为目标修正系数,并将所述目标修正系数对应的第二配准图像确定为待处理图像;
59、若最大归一化互相关系数小于阈值,不对与所述参考帧相邻的图像帧进行分割,将与所述参考帧相邻的图像帧的下一图像帧确定为与所述参考帧相邻的图像帧,将该图像帧每条基准线预设上下高度范围扩大到修正后的上下高度范围,返回执行针对每条基准线,分别采用不同的修正系数对基准线进行修正,在与所述参考帧相邻的图像帧中裁剪以修正后的基准线为中心,对应基准线预设上下高度范围内的图像,得到不同修正系数下修正后的基准线对应的第二配准图像。
60、在一些实施例中,所述利用最短路径寻找算法在参考图像中寻找最短路径,包括:
61、计算参考图像对应的初始权重图;
62、对所述初始权重图进行模糊判断处理,得到由权重值大于模糊判断阈值的列组成的目标权重图;
63、构建所述目标权重图对应的邻接矩阵,确定最短路径所在的起点和终点,并利用最短路径寻找算法在所述目标权重图中寻找最短路径。
64、在一些实施例中,在针对每条基准线,分别计算不同修正系数下的所述第一配准图像与所述第二配准图像的归一化互相关系数之后,所述方法还包括:
65、针对每条基准线,在不同修正系数下,分别将所述第一配准图像与所述第二配准图像按照宽度划分为多个子图像,得到多个子图像对,每个子图像对包括:第一配准子图像以及与其对应的第二配准子图像;
66、分别计算每个子图像对的归一化互相关系数;
67、在所述第一配准图像与所述第二配准图像的归一化互相关系数大于阈值的情况下,若存在归一化互相关系数小于阈值的子图像对,将该子图像对中的所述第二配准子图像确定为目标子图像,参考图像中除目标子图像之外的子图像为非目标子图像;
68、所述利用最短路径寻找算法在参考图像中寻找最短路径,包括:
69、计算参考图像对应的初始权重图;
70、对所述初始权重图进行模糊判断处理,得到由权重值大于模糊判断阈值的点组成的目标权重图,其中,非目标子图像中的点对应的模糊判断阈值为原始模糊判断阈值,目标子图像中的点对应模糊判断阈值为原始模糊判断阈值与预设值的差值;
71、构建所述目标权重图对应的邻接矩阵,确定最短路径所在的起点和终点,并利用最短路径寻找算法在所述目标权重图中寻找最短路径。
72、在一些实施例中,所述分别根据每条最短路径,确定与所述参考帧相邻的图像帧的多条基准线,包括:
73、分别将每条最短路径的坐标转换为与所述参考帧相邻的图像帧中的坐标,得到与所述参考帧相邻的图像帧的多条基准线,其中,至少内界膜ilm、光感受器细胞外节os上表面分界线、内核层inl与外丛状层opl之间的分界线对应的基准线分割成功;
74、根据与所述参考帧相邻的图像帧中所述inl与所述opl之间的分界线对应的基准线以及所述inl与所述opl之间的分界线、内丛状层ipl与所述inl之间的分界线、所述opl与外核层onl之间的分界线对应的基准线之间的位置关系,对所述ipl与所述inl之间的分界线和所述opl与所述onl之间的分界线对应的基准线进行修正;
75、根据与所述参考帧相邻的图像帧中所述os上表面分界线对应的基准线以及所述os上表面分界线、rpe下表面分界线、椭圆体带ez上表面分界线、所述ez下表面分界线、外界膜elm上表面分界线、所述elm下表面分界线对应的基准线之间的位置关系,对rpe下表面分界线、所述ez上表面分界线、所述ez下表面分界线、所述elm上表面分界线、所述elm下表面分界线对应的基准线进行修正。
76、第二方面,本发明实施例提供了一种oct图像分割装置,包括:
77、参考帧确定单元,用于确定目标对象的三维oct数据中的参考帧;
78、参考帧分割单元,用于对所述参考帧进行分割,得到所述参考帧的多条基准线;
79、相邻图像帧分割单元,用于依据所述参考帧的多条基准线,对与所述参考帧相邻的图像帧进行分割,得到与所述参考帧相邻的图像帧的多条基准线;
80、参考帧更新单元,用于将与所述参考帧相邻的图像帧作为所述参考帧,并触发所述相邻图像帧分割单元,直到完成对所述三维oct数据中所有图像帧的分割。
81、在一些实施例中,若所述目标对象为视网膜,参考帧分割单元包括:
82、第一分割子单元,用于对所述参考帧的内界膜ilm进行分割,得到对应的基准线;
83、第二分割子单元,用于对所述参考帧的光感受器细胞外节os上表面分界线进行分割,得到对应的基准线;
84、第三分割子单元,用于根据所述ilm对应的基准线对所述参考帧中与所述ilm相关联的分界线进行分割,得到对应的基准线;
85、第四分割子单元,用于根据所述os上表面分界线对应的基准线对所述参考帧中与所述os上表面分界线相关联的分界线进行分割,得到对应的基准线。
86、在一些实施例中,所述第一分割子单元,具体用于对所述参考帧依次进行阈值化处理和过滤处理,得到二值化图像;针对所述二值化图像中的每一列,从上到下进行遍历,直到遍历到第一个不为0的点停止,得到每一列第一个不为0的点,获得第一向量,并对所述第一向量进行平滑优化处理;在所述参考帧中裁剪以所述第一向量中的各个点为中心点、预设第一上下高度范围内的图像,得到参考图像;利用最短路径寻找算法在参考图像中寻找最短路径;根据所述最短路径,确定所述ilm对应的基准线。
87、在一些实施例中,所述第二分割子单元,具体用于对所述参考帧进行滤波处理,针对所述参考帧的每一列,从所述ilm对应的基准线向下遍历,得到每一列最亮的点;从每一列最亮的点中确定多段由连续点组成的有效线段,得到由有效线段中的点组成的第二向量,并对所述第二向量进行平滑优化处理;在所述参考帧中裁剪以所述第二向量中的各个点为中心点、预设第二上下高度范围内的图像,得到参考图像;利用最短路径寻找算法在参考图像中寻找最短路径;根据所述最短路径,确定所述os上表面分界线对应的基准线。
88、在一些实施例中,所述第三分割子单元,具体用于:
89、在所述参考帧中裁剪所述ilm对应的基准线下方第一预设区域内的图像,得到第一预设区域对应的参考图像;
90、利用最短路径寻找算法在参考图像中寻找最短路径;
91、根据第一预设区域对应的最短路径,确定内核层inl与外丛状层opl之间的分界线对应的基准线;
92、在所述参考帧中裁剪所述inl与所述opl之间的分界线对应的基准线上方第二预设区域内的图像,得到第二预设区域对应的参考图像,并在所述参考帧中裁剪所述inl与所述opl之间的分界线对应的基准线下方第三预设区域内的图像,得到第三预设区域对应的参考图像;
93、利用最短路径寻找算法在参考图像中寻找最短路径;
94、根据第二预设区域对应的最短路径,确定内丛状层ipl与所述inl之间的分界线对应的基准线,并根据第三预设区域对应的最短路径,确定所述opl与外核层onl之间的分界线对应的基准线。
95、在一些实施例中,所述第四分割子单元,具体用于:
96、在所述参考帧中裁剪所述os上表面分界线对应的基准线下方第四预设区域内的图像,得到第四预设区域对应的参考图像;
97、利用最短路径寻找算法在参考图像中寻找最短路径;
98、根据第四预设区域对应的最短路径,确定rpe下表面对应的基准线;
99、在所述参考帧中裁剪所述os上表面分界线对应的基准线上方第五预设区域内的图像,得到第五预设区域对应的参考图像;
100、利用最短路径寻找算法在参考图像中寻找最短路径;
101、根据第五预设区域对应的最短路径,确定椭圆体带ez上表面分界线对应的基准线;
102、在所述参考帧中裁剪所述ez上表面对应的基准线与所述os上表面分界线之间第六预设区域内的图像,得到第六预设区域对应的参考图像,在所述参考帧中裁剪所述ez上表面对应的基准线上方第七预设区域内的图像,得到第七预设区域对应的参考图像,并在所述参考帧中裁剪所述ez上表面对应的基准线上方第八预设区域内的图像,得到第八预设区域对应的参考图像;
103、利用最短路径寻找算法在参考图像中寻找最短路径;
104、根据第六预设区域对应的最短路径,确定所述ez下表面分界线对应的基准线,根据第七预设区域对应的最短路径,确定外界膜elm上表面分界线对应的基准线,根据第八预设区域对应的最短路径,确定所述elm下表面分界线对应的基准线。
105、在一些实施例中,所述相邻图像帧分割单元,具体用于:
106、在所述参考帧中分别裁剪以每条基准线为中心,对应基准线预设上下高度范围内的图像,得到每条基准线对应的第一配准图像;
107、针对每条基准线,分别采用不同的修正系数对基准线进行修正,在与所述参考帧相邻的图像帧中裁剪以修正后的基准线为中心,对应基准线预设上下高度范围内的图像,得到不同修正系数下修正后的基准线对应的第二配准图像;
108、针对每条基准线,分别计算不同修正系数下的所述第一配准图像与所述第二配准图像的归一化互相关系数,将最大归一化互相关系数对应的修正系数确定为目标修正系数,并将所述目标修正系数对应的第二配准图像确定为待处理图像;
109、对所述待处理图像进行预设优化处理,得到参考图像;
110、利用最短路径寻找算法在参考图像中寻找最短路径;
111、分别根据每条最短路径,确定与所述参考帧相邻的图像帧的多条基准线。
112、相对于现有技术,本发明的有益效果如下:
113、本发明公开的一种oct图像分割方法及装置,选取目标对象的三维oct数据中图像质量最好的图像帧作为参考帧,实现对参考帧的准确分割,得到参考帧的多条基准线,从而依据参考帧的多条基准线实现对与参考帧相邻的图像帧的快速准确分割,并通过将与参考帧相邻的图像帧作为参考帧,依次循环对其他图像帧进行快速准确分割。由于除初始参考帧之外的图像帧都是基于已分割的相邻图像帧的基准线进行分割的,最终得到的三维oct数据中所有图像帧的分割结果是一个完整连续的分界面,有效提高了oct图像分割的准确性。同时,由于不需要对每一帧图像都采用参考帧的分割方法进行分割,而是依据参考帧的多条基准线对与参考帧相邻的图像帧进行快速分割,有效降低除初始参考帧之外的图像帧的分割处理复杂度,提高了oct图像的整体分割处理速度。
- 还没有人留言评论。精彩留言会获得点赞!