一种无轴承式直升机结构动稳定性分析方法及系统
本发明涉及直升机旋翼设计领域,特别是涉及一种无轴承式直升机结构动稳定性分析方法及系统。
背景技术:
1、旋翼桨毂作为桨叶与旋翼轴的连接件,其作用就是保证桨叶能实现运动学功能,并将桨叶上的载荷传递给旋翼轴。桨毂与直升机的飞行性能、飞行品质及维修保障性等方面息息相关,其构造形式一直不断改进,在保证疲劳强度和轴承运转周期寿命的条件下,经历了一个从复杂到简单的发展历程。铰的出现解决了直升机的稳定性和操纵性问题,从四十年代到六十年代,铰接式旋翼都是主要的旋翼型式。在长时间不断的实践中,积累了不少技术经验。但是,由于结构复杂、动部件多、制造成本高、可靠性差、维护工作量大、操纵效率及角度阻尼小等缺点,这种型式很不理想。
2、从上世纪五十年代科研人员就开始了旋翼桨毂简化的研究工作。最开始是用弹性轴承或钛合金挠性件来代替过去的金属铰链,黑鹰是比较有代表性的。此后,研究工作者采用复合材料代替金属变形件,球柔性、星形柔性桨毂随之出现,并取得不错的应用效果,如安装星形柔性桨毂的sa365“海豚”直升机及球柔性桨毂的ec155。这些旋翼结构简单,寿命周期也大大延长。经过长期的研究及试验工作,桨毂构型得到进一步简化,直接用弹性变形取代轴承,只保留变距用的轴向铰,无轴承式旋翼应运而生。
3、无轴承式旋翼正在成为直升机发展的趋势,中国直升机所也正在加紧无轴承式旋翼研制步伐。在2015年5月,安装无轴承旋翼的直11型验证机悬停飞行取得成功,这标志着中国无轴承式旋翼研发取得了阶段性的突破。
4、无轴承式旋翼桨叶运动自由度之间耦合情况严重,旋翼/机体耦合的动不稳定性问题突出。铰接式的挥舞及摆振运动都是靠绕真实铰的转动实现的,而无轴承式则是由旋翼的挠曲变形来实现。铰接式旋翼的挥舞及摆振运动分别发生在水平铰及垂直铰处,而变距铰一般都在这两个铰之外,且桨叶作用的弯矩一般又较小,因此弹性耦合很小。而无轴承式旋翼难以将保留的变距铰布置到发生大挠曲变形的部位之外,造成桨叶运动自由度之间耦合情况严重,对旋翼的结构动力学特性有重要影响。总的来说,无轴承式旋翼拥有构造简单、维护工作量小、操纵功效及角速度阻尼大的优点,特别对于武装直升机,是很有发展前途的。但伴随着桨毂结构的简化,也出现了桨叶的多自由度的耦合、旋翼/机体耦合等动不稳定问题,这些都是需要攻关及进一步研究的无轴承式旋翼关键技术。
5、动稳定性问题的研究范畴是初始扰动以后系统的振动运动是收敛还是发散,或者说是稳定还是不稳定的。如扰动后的运动是不稳定的(发散的),往往会给直升机带来严重的后果。在直升机发展史上曾不止一次由于旋翼颤振和直升机“地面共振”等动不稳定现象的出现在空中或地面毁坏了直升机。
6、动不稳定现象大多来自两个不同自由度振动之间的耦合,而且也大多与空气动力的作用有关。遗憾的是旋翼的运动自由度实在是太多了。这样,可能出现的动不稳定性问题也就相应的多了,在设计旋翼时就必须保证在直升机的工作范围(转速范围、飞行速度范围、桨距范围等)内不出现任何一种动不稳定现象,或者说要设法把出现不稳定运动的临界条件推移到工作范围之外去。这样一个要求对旋翼及直升机其他部分结构在某些方面带来很大的影响。
7、直升机上与旋翼相关的动不稳定性问题大体可以分为两种类型:一种是旋翼本身各个自由度耦合的动不稳定性问题,如颤振等;另一种是旋翼与机体之间耦合产生的动不稳定性问题。旋翼本身的动不稳定性问题来源于旋翼桨叶存在着挥舞、摆振及扭转三个运动自由度,而每个运动又是由不同阶次振动叠加而成的。但是一般说来一些经典的动稳定性问题主要是由最低阶振型的振动构成的,也就是说挥舞及摆振零阶(铰接式)或一阶(无轴承式)振型、扭转一阶振型。比较典型的动力不稳定性问题有:变距—挥舞颤振,变距—摆振不稳定性,挥舞—摆振不稳定性,还有所谓的失速颤振。旋翼与机体耦合的动不稳定性问题是由桨叶摆振运动与机体振动耦合而形成的。桨叶的摆振运动按其最低阶振型,并且各片桨叶之间的相位关系构成了后退型振型,机体的振型指的是带动桨毂中心产生水平位移的振型。不稳定运动可能在直升机停在地面时发生,即地面共振,也可能在空中发生,即空中共振。
8、直升机地面及空中共振是一种旋翼/机体耦合的动不稳定性问题,是直升机界所熟知的动力学基本问题之一,它们是旋翼和机体耦合的动不稳定性运动,主要的自激振动源是旋翼摆振后退型模态与旋翼桨毂中心有水平位移的机体模态的耦合。直升机发生地面共振和空中共振将会导致严重后果,因此在直升机研制中必须予以准确的分析计算和试验,并采取相应的设计措施以防止其出现,其关键是建立旋翼/机体耦合动稳定性准确的计算模型和选择相应具有一定精度的分析方法。
9、针对直升机旋翼/机体耦合系统动稳定性这一问题已经有很多学者开展过研究工作。coleman和feingold(coleman p.r., feingold a.m.. theory of self-excitedmechanical oscillations of helicopter rotors with hinged blades[r]. nacareport 1351,1958)在旋转坐标系中建立各片桨叶的动力学方程,在固定坐标系中建立机体的动力学方程。通过多桨叶坐标变换(coleman变换)把桨叶在旋转坐标系中的运动自由度转换到固定坐标系中,转换成系统的特征方程后对其进行特征值分析,这种做法被后来的学者广泛采用,在此基础上建立了不计入挥舞自由度及空气动力的经典地面共振分析模型。胡国才(胡国才. 减摆器非线性特性及其对直升机旋翼/机体耦合动稳定性影响研究[d]. 北京: 北京航空航天大学, 2004.)建立的旋翼/机体耦合动力学模型可以满足直升机悬停、地面及前飞不同状态的动稳定性分析。桨叶模型为当量铰刚性桨叶,气动力模型选取扩展的pitt/peters动力入流模型,计入挥舞自由度及机体的俯仰、滚转运动。提出了一种隐式多桨叶坐标转换方法,从而省去了进行小扰动假设及量纲分析过程,运用floquet传递矩阵法完成对微分方程的求解。
10、在无轴承式旋翼直升机动稳定性研究方面,文献中多是采用hermite插值和线性插值表示旋翼桨叶各单元上的振动位移,这样的插值函数会导致求解振动方程过程复杂,往往导致研究计算精度不足。
11、基于上述问题,亟需提供一种考虑桨叶复杂运动的无轴承式直升机结构动稳定性分析方法或系统,能够使得动稳定性问题分析的精度得以提高。
技术实现思路
1、本发明的目的是提供一种无轴承式直升机结构动稳定性分析方法及系统,能够提高无轴承旋翼系统动力学分析的精确度。
2、为实现上述目的,本发明提供了如下方案:
3、一种无轴承式直升机结构动稳定性分析方法,包括:
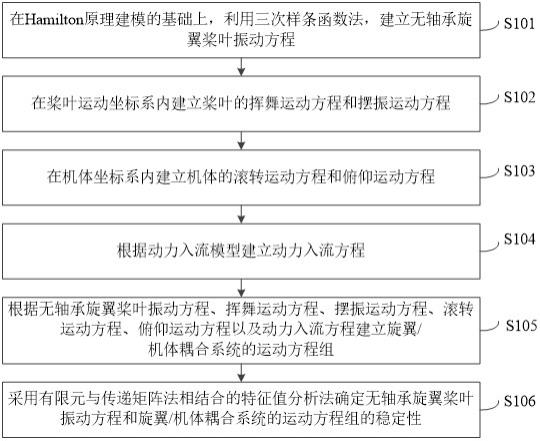
4、在hamilton原理建模的基础上,利用三次样条函数法,建立无轴承旋翼桨叶振动方程;
5、在桨叶运动坐标系内建立桨叶的挥舞运动方程和摆振运动方程;
6、在机体坐标系内建立机体的滚转运动方程和俯仰运动方程;
7、根据动力入流模型建立动力入流方程;
8、根据无轴承旋翼桨叶振动方程、挥舞运动方程、摆振运动方程、滚转运动方程、俯仰运动方程以及动力入流方程建立旋翼/机体耦合系统的运动方程组;
9、采用有限元与传递矩阵法相结合的特征值分析法确定无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组的稳定性。
10、可选地,所述在hamilton原理建模的基础上,利用三次样条函数法,确定无轴承旋翼桨叶振动方程,具体包括以下公式:
11、;
12、其中,为惯性矩阵,为阻尼矩阵,为刚度矩阵,为外载荷向量,和分别为桨叶节点振动位移的一阶和二阶时间导数,为全局自由度下桨叶节点的振动位移。
13、可选地,所述在桨叶运动坐标系内建立桨叶的挥舞运动方程和摆振运动方程,具体包括以下公式:
14、;
15、;
16、其中,、、和分别为桨叶在挥舞方向的惯性力矩、根部约束力矩、结构阻尼力矩和气动力矩,、、和分别为桨叶对于摆振铰作用的惯性力矩、根部约束力矩、结构阻尼力矩和气动力矩。
17、可选地,所述在机体坐标系内建立机体的滚转运动方程和俯仰运动方程,具体包括以下公式:
18、;
19、;
20、其中,和分别为绕机体瞬时转动轴的惯性矩基于机体坐标系的横纵坐标,和分别为绕机体瞬时转动轴的阻尼系数基于机体坐标系的横纵坐标,和分别为绕机体瞬时转动轴的约束刚度基于机体坐标系的横纵坐标,和分别为第片桨叶对机体的滚转力矩和俯仰力矩,为直升机桨叶片数,和分别为机体滚转角和机体俯仰角,和为机体滚转角的一次求导和二次求导,和为机体滚转角的一次求导和二次求导,下标和分别为机体坐标系的横纵坐标。
21、可选地,所述根据动力入流模型建立动力入流方程,具体包括以下公式:
22、;
23、其中,及分别为空气显式质量矩阵及入流的增益矩阵,、及分别表示旋翼总的气动升力系数、对桨毂中心的气动滚转力矩系数及气动俯仰力矩系数,为桨盘平均诱导速度,和分别为旋翼气动滚转力矩和俯仰力矩变化引起的诱导速度,为桨盘平均诱导速度的一阶时间导数,和分别为旋翼气动滚转力矩和俯仰力矩变化引起的诱导速度的一阶时间导数,下标表示气动力系数,上标表示转置。
24、可选地,所述根据无轴承旋翼桨叶振动方程、挥舞运动方程、摆振运动方程、滚转运动方程、俯仰运动方程以及动力入流方程确定旋翼/机体耦合系统的运动方程组,具体包括以下公式:
25、;
26、其中,为旋翼/机体耦合系统的运动方程组,、分别为各片桨叶的挥舞角、摆振角。
27、可选地,所述采用有限元与传递矩阵法相结合的特征值分析法确定无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组的稳定性,具体包括:
28、利用公式确定无轴承旋翼桨叶振动方程的稳态响应方程;
29、当稳态响应方程为稳定状态时,利用公式确定线化小扰动运动方程;
30、根据线化小扰动运动方程求解固有模态特性并进行模态转换,确定无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组的稳定性;
31、其中,和分别为悬停状态下桨叶节点位移和外载荷向量,、和是稳定状态下的惯性矩阵、阻尼矩阵和刚度矩阵,为小扰动振动,和分别为小扰动振动的一阶和二阶时间导数。
32、一种无轴承式直升机结构动稳定性分析系统,包括:
33、无轴承旋翼桨叶振动方程建立模块,用于在hamilton原理建模的基础上,利用三次样条函数法,建立无轴承旋翼桨叶振动方程;
34、挥舞运动方程和摆振运动方程建立模块,用于在桨叶运动坐标系内建立桨叶的挥舞运动方程和摆振运动方程;
35、滚转运动方程和俯仰运动方程建立模块,用于在机体坐标系内建立机体的滚转运动方程和俯仰运动方程;
36、动力入流方程建立模块,用于根据动力入流模型建立动力入流方程;
37、旋翼/机体耦合系统的运动方程组建立模块,用于根据无轴承旋翼桨叶振动方程、挥舞运动方程、摆振运动方程、滚转运动方程、俯仰运动方程以及动力入流方程建立旋翼/机体耦合系统的运动方程组;
38、稳定性确定模块,用于采用有限元与传递矩阵法相结合的特征值分析法确定无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组的稳定性。
39、根据本发明提供的具体实施例,本发明公开了以下技术效果:
40、本发明所提供的一种无轴承式直升机结构动稳定性分析方法及系统,以包含复杂的空气动力和结构动力学的无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组的稳定性分析模型为基础,提供一种考虑桨叶复杂运动的无轴承式直升机结构动稳定性分析方法。首先建立准确反映直升机旋翼结构及飞行气动环境的无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组;采用有限元与传递矩阵法相结合的特征值分析法求解无轴承旋翼桨叶振动方程和旋翼/机体耦合系统的运动方程组的稳定性。本发明根据无轴承直升机旋翼桨叶运动自由度之间耦合情况严重的特点,采用三次样条插值函数表示节点之间的振动位移,并且运用了有限元与传递矩阵法相结合的特征值分析法,极大地提高了无轴承旋翼系统动力学分析的精确度,对于无轴承式旋翼桨叶运动自由度之间耦合情况严重,旋翼/机体耦合的动不稳定性问题突出,动稳定性分析研究困难等问题具有指导性意义。
- 还没有人留言评论。精彩留言会获得点赞!