一种基于浮体运动响应的波面反演方法及系统
本发明涉及海洋工程,尤其涉及一种基于浮体运动响应的波面反演方法及系统。
背景技术:
1、海洋动力环境,特别是海浪环境要素,对于海洋工程的设计和运维至关重要,波面运动是海洋动力环境的直接反应,通过对波面运动的测量,可以有效反应海洋运动规律,指导海洋工程建设和海上设施运维。波面运动的测量通常需要借助海上目标的运动进行反演。
2、浮标是目前国际上最为主流和通用的海浪环境观测手段,观测浮标通常具有良好的随波性,通过记录浮标自身垂荡运动实现波面观测。近年来,人们逐渐将浮标观测海浪技术推广延伸至大型油气平台和船舶等一般浮体,利用浮体自身响应进行波浪反演,为平台结构实时健康监测、船舶航行辅助决策、海上施工作业等提供环境数据支撑。
3、然而,目前这一技术在实际应用中尚处于起步探索阶段,特别是在不规则波面时历反演方面仍存在较大不足。主要表现在,现有技术建立在浮体运动响应稳态假定的频域理论框架基础上,忽略了浮体动力响应本身的固有瞬态特性,严重影响了波面的识别精度,成为目前制约浮体响应反演波面的一大重要技术瓶颈。
4、现有技术中,尚缺少可精确进行波面反演的算法。浮体漂浮在海面上,其运动是对波面运动的直接反应,浮体的运动参数采集技术相对成熟。利用浮体运动参数进行波面运动的反演,将能获得较好的反演结果。
技术实现思路
1、本发明的目的在于解决以上技术问题,提供一种波面识别精度高的基于浮体运动响应的波面反演方法及系统,该方法旨在借助海面浮体目标的运动响应,充分利用其瞬态特性,对波面的运动进行更加精确的反演,该系统用于实现该波面反演方法。
2、为实现上述目的,本发明采用的技术方案是:
3、一种基于浮体运动响应的波面反演方法,包括以下步骤:
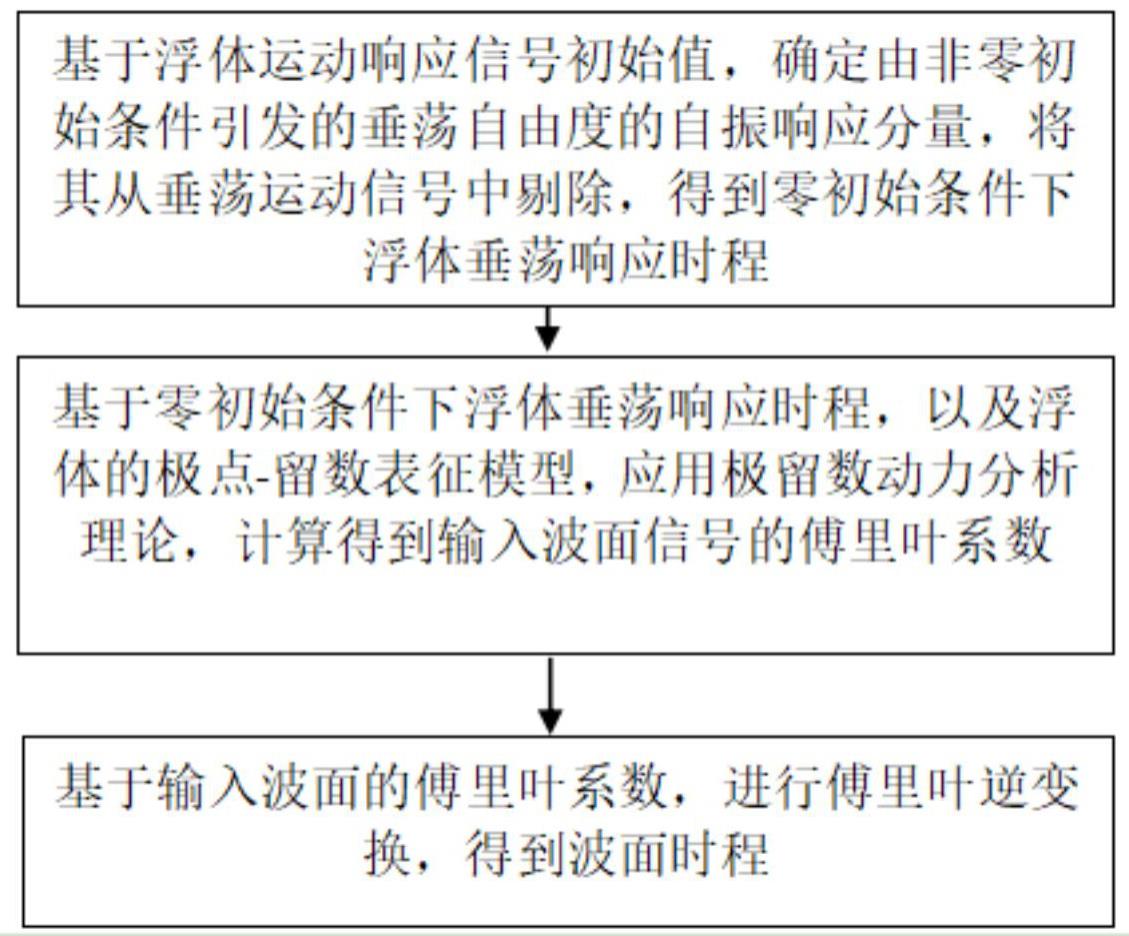
4、s1:基于浮体运动响应信号初始值,确定由非零初始条件引发的浮体垂荡自由度运动信号的自振响应分量,将所述自振响应分量从浮体垂荡自由度运动信号中剔除,得到零初始条件下浮体垂荡位移序列;
5、s2:基于零初始条件下浮体垂荡位移序列,以及浮体的极点-留数表征模型,计算得到输入波面信号的傅里叶系数;
6、s3:基于输入波面信号的傅里叶系数,进行傅里叶逆变换,得到入射波面时程。
7、本发明一些实施例中,步骤s1的执行步骤进一步包括:
8、s11:基于浮体六自由度运动位移信号和浮体六自由度速度信号,确定浮体在第个自由度的运动位移向量和浮体在第个自由度的运动速度向量,其中:
9、浮体六自由度运动位移信号:;
10、浮体六自由度速度信号:;
11、浮体在第个自由度的运动位移向量:=;
12、浮体在第个自由度的运动速度向量:=;
13、其中:下标1, 2, 3, 4, 5, 6分别代表浮体纵荡、横荡、垂荡、横摇、纵摇和首摇运动自由度,1, 2, 3, 4, 5, 6,,=0,1,……,-1,是时间,是时间间隔,为时间点序号,是时间点个数,上标代表向量转置;
14、令=0,确定浮体六自由度运动初始位移和浮体六自由度运动初始速度,其中:
15、浮体六自由度运动初始位移:
16、浮体六自由度运动初始速度:
17、s12:基于浮体六自由度运动初始位移和浮体六自由度运动初始速度,采用四阶-龙格库塔算法求解浮体自振运动控制方程:
18、;
19、基于浮体自振运动控制方程,得到非零初始条件引发的浮体垂荡自由度运动信号的自振响应分量;
20、其中,为浮体质量矩阵,为浮体附加质量矩阵,为浮体静水回复刚度矩阵,为浮体时延函数,为时间哑变量;
21、s13:将所述自振响应分量从浮体垂荡自由度信号中剔除,得到零初始条件下浮体垂荡位移序列:
22、。
23、本发明一些实施例中,步骤s2的执行步骤进一步包括:
24、s21:确定待求入射波面时程的傅里叶级数表征模型:
25、;
26、其中,是欧拉数,为指数函数,为虚数,为离散频率,为频率间隔,为傅里叶系数,为频率点序号,是频率点个数;
27、s22:对上述傅里叶级数表征模型函数进行拉普拉斯变换,得到波面在拉普拉斯域的极点-留数表征函数:
28、;
29、其中,为波面时程函数的拉普拉斯变换,为拉普拉斯域变量;
30、s23:计算波浪作用下浮体垂荡频响函数,在拉普拉斯域内构建浮体因果化波浪-垂荡运动系统传递函数的极点-留数表征模型:
31、对浮体垂荡频响函数进行傅里叶逆变换,获得浮体垂荡脉冲响应函数:
32、;
33、其中,是圆周率,是圆频率,是时间;
34、基于浮体垂荡脉冲响应函数,计算得到因果化浮体垂荡脉冲响应函数:
35、;
36、其中,为因果化时间,满足当时,取值为零;
37、对进行复指数分解,将表示成一系列有限数量复指数函数之和:
38、;
39、对复指数分解后的所述因果化浮体垂荡脉冲响应函数进行拉普拉斯变换,得到所述浮体垂荡脉冲响应函数在拉普拉斯域内的极点-留数表征模型;
40、;
41、其中,为的拉普拉斯变换,为极点,为留数,为极点和留数的序号,为极点和留数的个数;
42、s24:构建零初始条件下入射波面作用引起的浮体垂荡位移序列计算模型,包括:
43、将上述得到的和相乘,得到拉普拉斯域内垂荡响应:
44、;
45、将写成极点-留数形式:
46、;
47、其中:为对应极点的留数,为对应极点的留数,其表达式分别为:
48、;
49、;
50、对进行拉普拉斯逆变换,得到时域函数表达式:
51、;
52、其中,函数:
53、;
54、令,可得零初始条件下浮体垂荡响应序列:
55、;
56、s25:构建基于零初始条件下浮体垂荡自由度运动信号自振响应分量的波面傅里叶系数的求解模型,包括:
57、使用的后个数据,将表示成矩阵形式:
58、;
59、其中,为垂荡响应列向量;
60、;
61、为傅里叶系数列向量:
62、;
63、为系数矩阵:
64、;
65、其中,为列向量,表达式为:
66、;
67、与满足如下关系:
68、;
69、;
70、其中,符号代表复共轭运算;
71、将矩阵表达写成如下显式表达:
72、;
73、令,,将的表达式改写成:
74、;
75、其中,和为的实部和虚部,和为的实部和虚部,表示取实部运算,表示取虚部运算;
76、将的表达式进一步写成矩阵形式:
77、;
78、其中,为系数矩阵:
79、;
80、为待求系数列向量:
81、;
82、求解关于的矩阵方程,可计算得到系数矩阵;
83、基于系数矩阵的计算结果,可以得到波面的傅里叶系数。
84、本发明一些实施例中,步骤s3的执行步骤包括:基于计算得到的波面傅里叶系数,计算入射波面时程:
85、。
86、本发明一些实施例中,步骤s23中,通过水动力软件,分析获得波浪作用下浮体垂荡频响函数。
87、本发明一些实施例中,浮体为浮标或船舶。
88、本发明一些实施例进一步提供一种波面反演系统,用于执行以上所述的波面反演方法。
89、本发明提供的基于浮体运动响应的波面反演方法及系统,其有益效果在于:
90、本发明提出一种高精度的利用浮体运动响应识别不规则波面时历的新方法。该方法建立在全新的极留数理论框架之上,充分考虑了浮体实测运动响应的固有瞬态特征,突破了传统技术将浮体响应全部假设为稳态响应的缺陷与不足,极大地提高了波面反演精度。
91、本发明提出的波面反演系统,可被搭载设置在海面浮体或陆地端,配置灵活,可实时进行数据反演计算,查看计算结果。
- 还没有人留言评论。精彩留言会获得点赞!