一种基于激光点云数据的输电塔杆避雷线保护角的提取方法、系统和存储介质与流程
:本发明涉及输电塔杆避雷线保护角提取,特别涉及一种基于激光点云数据的输电塔杆避雷线保护角的提取方法、系统和存储介质。
背景技术
0、
背景技术:
1、架空输电线路是电力系统的重要组成部分,其运行质量对于电力系统的高效、稳定、安全运行具有十分重要的意义。架空输电线路分布广泛,且暴露在大气环境中,所经过的区域环境存在较大差异,会受到强风暴侵袭、结冰荷载、雷闪袭击、雨淋、湿雾以及自然和工业污秽等影响;同时其自身结构中组件较多,形成故障的因素较多,对电网安全运行造成一定的影响。因此,电力线路故障预防历来都是电力系统的一项重要工作。
2、近年来,随着全球气候变化,强对流天气出现频率增加,许多地区发生风偏闪络,结冰荷载,雷击跳闸等故障的次数升高,因此输电线路的塔高,档距等线路参数的设计尤为重要。
3、为解决上述问题,本文改变以前人工计算方式,发明一种基于激光点云数据的输电塔杆避雷线保护角的提取方法、系统和存储介质。
技术实现思路
0、
技术实现要素:
1、针对以上问题,本发明提出一种基于激光点云数据的输电塔杆避雷线保护角的提取方法,所述方法具体包括如下步骤:
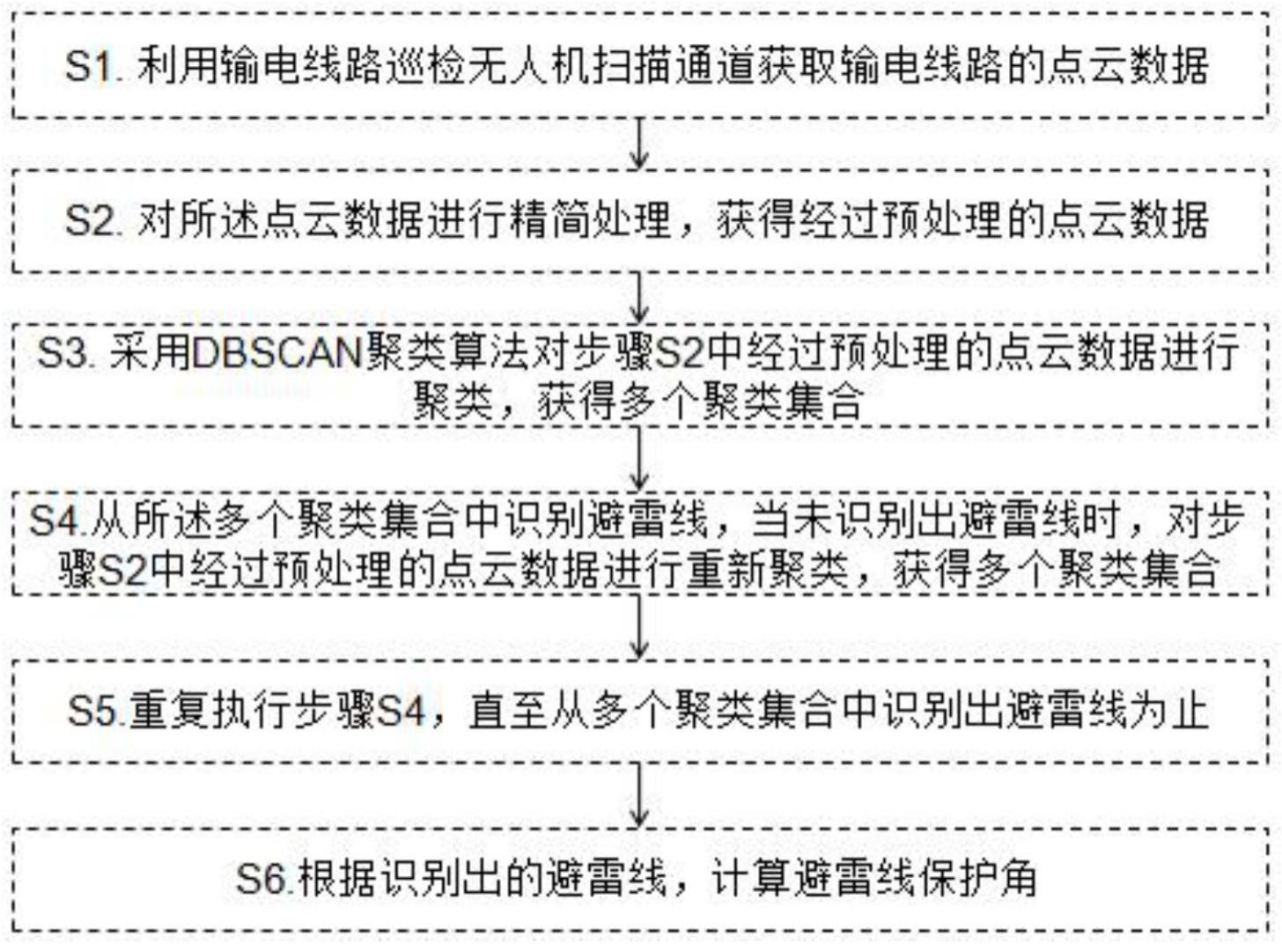
2、s1.利用输电线路巡检无人机扫描通道获取输电线路的点云数据;
3、s2.对所述点云数据进行精简处理,获得经过预处理的点云数据;
4、s3.采用dbscan聚类算法对步骤s2中经过预处理的点云数据进行聚类,获得多个聚类集合;
5、s4.从所述多个聚类集合中识别避雷线,当未识别出避雷线时,对步骤s2中经过预处理的点云数据进行重新聚类,获得多个聚类集合;
6、s5.重复执行步骤s4,直至从多个聚类集合中识别出避雷线为止;
7、s6.根据识别出的避雷线,计算避雷线保护角。
8、进一步地,所述步骤s1具体包括:
9、通过无人机携带的激光雷达,对输电线路进行扫描,生成输电线路的点云数据;
10、所述输电线路的点云数据包括输电线路中实体点的三维坐标(x,y,z)、颜色参数(r,g,b);
11、所述输电线路包括杆塔、避雷线、导线。
12、进一步地,所述步骤s2具体包括如下步骤:
13、s21.获取步骤s1中的所有点云数据中所有点的最大和最小x、y、z坐标,分别为所有点的最大x坐标xmax、所有点的最小x坐标xmin、所有点的最大y坐标ymax、所有点的最小y坐标ymin、所有点的最大z坐标zmax、所有点的最小z坐标zmin;
14、s22.确定xmax、xmin、ymax、ymin、zmax、zmin包围组成的长方体包围盒;
15、s23.将所述长方体包围盒分割成多个以b为边长的立方体;
16、s24.获取所述多个以b为边长的立方体中每个立方体内的实体点的个数,并计算获得多个立方体的实体点个数的平均值;
17、s25.针对每个立方体,当该立方体内的实体点的个数小于所述平均值的50%时,将该立方体二次分割成多个以c为边长的立方体;
18、当该立方体的实体点的个数大于等于所述平均值的50%且小于所述平均值时,将该立方体二次分割成多个以d为边长的立方体;
19、其中c<d<b;
20、s26.重复执行步骤s25,直至将所述长方体包围盒中的每个立方体均二次分割完毕,获得二次分割后的多个立方体;
21、s27.针对步骤s26中获得的二次分割后的多个立方体中的每个立方体,获得该立方体内的多个实体点的三维坐标的平均值(xp,yp,zp),将所述平均值(xp,yp,zp)对应的坐标点作为该立方体的质心;
22、获得该立方体内的多个实体点的颜色参数的平均值(rp,gp,bp),作为该立方体的质心的颜色参数;
23、s28.重复执行步骤s27,直至获得二次分割后的多个立方体中的每个立方体的质心为止;
24、s29.将步骤s28中获得的多个质心作为经过预处理的点云数据。
25、进一步地,所述步骤s3具体包括如下步骤:
26、s31.初始化dbscan算法中的eps(∈)和minpts值;
27、s32.采用dbscan算法对步骤s29中获得的所述经过预处理的点云数据进行聚类,获得多个聚类集合。
28、进一步地,所述步骤s32具体包括如下步骤:
29、s321.选取步骤s29中获得的点云数据中的一个点,计算该点在邻域eps(∈)范围内的邻居点数量m;
30、s322.当所述数量m≥minpts时,将该点标记为核心点;
31、s323.当所述核心点未被分配给一个聚类时,创建一个新的聚类,并将该核心点和该核心点的所有邻居点添加至所述新的聚类中;
32、s324.针对步骤s29中获得的点云数据中的每个点,执行步骤s321至步骤s323,直至每个点均被访问过,获得多个聚类集合。
33、进一步地,所述步骤s321具体包括:
34、当所述该点的周边的点与所述该点的欧式距离小于等于eps(∈)时,将该周边的点作为所述该点在邻域eps(∈)范围内的邻居点。
35、进一步地,所述步骤s4具体包括如下步骤:
36、s41.获取步骤s324中获得的多个聚类集合的主视图;
37、其中,所述主视图为与地面平行的方向观察建筑物所形成的二维图形;
38、s42.基于避雷线图像数据库对每个聚类集合的主视图对应的二维图形进行识别,判断是否能够识别出避雷线;
39、其中,所述避雷线图像数据库存储从主视图方向上获取的多个避雷线的二维图像和三维图像;
40、s43.当未能识别出避雷线时,调整dbscan算法中的eps(∈)和minpts值,对步骤s2中经过预处理的点云数据进行重新聚类。
41、进一步地,所述步骤s42具体包括如下步骤:
42、s421.针对一个聚类集合的主视图,获取该主视图所包含的建筑物图像的所有点的最小x值、最大x值、最小y值、最大y值,将所述最小x值、最大x值之间的长度作为长l1,将所述最小y值、最大y值之间的长度作为宽k1,形成以所述长l1和所述宽k1的长方形,以所述长方形的大小将建筑物图像从所述主视图中切割出来;
43、其中所述长方形包括主视图中建筑物的图像;
44、其中,主视图的x轴为横向水平轴,主视图的y轴为纵向竖直轴;
45、s422.对于避雷线图像数据库中的每个二维图像,获取该二维图像中的避雷线图像的所有点的最小x值、最大x值、最小y值、最大y值,将所述最小x值、最大x值之间的长度作为长l2,将所述最小y值、最大y值之间的长度作为宽k2,形成以所述长l2和所述宽k2的长方形,以所述长方形的大小将建筑物图像从所述主视图中切割出来;
46、s423.分别计算步骤s421中所述主视图内的建筑物图像在所述长方形中的面积占比r1,以及避雷线图像数据库中所有避雷线的二维图像在所述长方形中的面积占比r2;
47、当时,判断步骤s421获取的该主视图对应的二维图形不是避雷线,将该主视图对应的聚类集合标记为非避雷线,并执行步骤s425;
48、当时,将步骤s421中的所述长方形中的建筑物图像平均分成上部、中部、下部三部分,分别从所述三部分的图像范围内随机取v个点,计算该v个点的颜色参数的平均值,最终获得上部、中部、下部图像对应的颜色参数平均值y1、y2、y3;将步骤s422中获得的每个长方形中的避雷线图像平均分成上部、中部、下部三部分,分别从所述三部分的图像范围内随机取v个点,计算该v个点的颜色参数的平均值,最终获得上部、中部、下部图像对应的颜色参数平均值y'1、y'2、y'3;
49、当y1与y'1,或者y1与y'3,或者y2与y'2,或者y3与y'1,或者y3与y'3的差值大于预设阈值t时,判断步骤s421获取的该主视图对应的二维图形不是避雷线,将该主视图对应的聚类集合标记为非避雷线,并执行步骤s425;当y1与y'1,或者y1与y'3,或者y2与y'2,或者y3与y'1,或者y3与y'3的差值小于等于预设阈值t时,执行步骤s424;
50、当时,执行步骤s424;
51、s424.将步骤s421中的聚类集合所对应的所有点组成的三维空间轮廓与所述避雷线图像数据库中的避雷线的三维图像的轮廓进行对比,当存在数据库中的一个或多个避雷线的三维图像的轮廓与步骤s421中的聚类集合所对应的所有点组成的三维空间轮廓的轮廓重合度大于预设阈值r时,判断该聚类集合为避雷线,将该聚类集合标记为避雷线,并执行步骤s425;当所述轮廓重合度小于等于预设阈值r时,判断该聚类集合为非避雷线,将该聚类集合标记为非避雷线,并执行步骤s425;
52、s425.重复执行步骤s421至步骤s424,直至将所有的聚类集合进行标记为止。
53、进一步地,所述步骤s43具体包括如下步骤:
54、s431.当步骤s42中识别出避雷线时,将当前的eps(∈)和minpts值作为dbscan算法分离避雷线的确定参数;
55、所述判断步骤s42中识别出避雷线,具体为:
56、遍历所有聚类集合中是否有标记为避雷线的聚类集合,当存在时,判断步骤s42中识别出避雷线;
57、s432.当步骤s42中未识别出避雷线时,调整dbscan算法中的eps(∈)和minpts值,对步骤s2中经过预处理的点云数据进行重新聚类。
58、进一步地,所述步骤s5具体包括如下步骤:
59、s51.重复执行步骤s4,直至从多个聚类集合中识别出避雷线位置,并将当前的eps(∈)和minpts值作为dbscan算法分离避雷线的确定参数。
60、进一步地,所述步骤s6具体包括如下步骤:
61、s61.获取步骤s5中识别出的避雷线对应的一个或多个聚类集合,获取每个聚类集合对应的避雷线的两个端点a和b;
62、其中端点a的高度大于端点b的高度;
63、s62.获取以a为起始点,指向底面并垂直于底面的射线ac;
64、s63.获取ab与ac的夹角作为避雷线保护角。
65、进一步地,在所述步骤s6之后,所述方法还包括:
66、当再次从点云数据中分离避雷线时,采用步骤s431或者s51中确定出的eps(∈)和minpts值作为dbscan算法的参数,对避雷线进行分离。
67、本发明还提出一种基于激光点云数据的输电塔杆避雷线保护角的提取系统,所述系统执行如下步骤:
68、s1.利用输电线路巡检无人机扫描通道获取输电线路的点云数据;
69、s2.对所述点云数据进行精简处理,获得经过预处理的点云数据;
70、s3.采用dbscan聚类算法对步骤s2中经过预处理的点云数据进行聚类,获得多个聚类集合;
71、s4.从所述多个聚类集合中识别避雷线,当未识别出避雷线时,对步骤s2中经过预处理的点云数据进行重新聚类,获得多个聚类集合;
72、s5.重复执行步骤s4,直至从多个聚类集合中识别出避雷线为止;
73、s6.根据识别出的避雷线,计算避雷线保护角。
74、本发明还提出一种计算机存储介质,所述存储介质存储指令,所述指令由处理器执行如一种基于激光点云数据的输电塔杆避雷线保护角的提取方法。
75、本发明的有益效果如下:
76、1.本发明通过无人机采集输电线路的三维坐标数据和颜色参数,形成点云数据,并对点云数据进行精简处理,通过动态调整eps(∈)和minpts参数的方式,采用dbscan算法对避雷线进行自动分离,最终实现避雷线保护角的计算,实现了对输电线路的自动化分析,避免人工计算所导致的不准确、耗时长的问题,并且缩短了时间,节约了人工成本,及时排除故障隐患,保障电网安全运行;
77、2.本发明通过精简处理对点云数据进行精简,并针对第一次分隔成的立方体内实体点的个数进行判断,并进行二次分割,二次分割使得在一次分割后处于边缘位置的立方体内的实体点进行更多地保留,使得精简后的点云数据能够更准确地反映输电线路边缘位置的图像,提高后续避雷线识别的准确性;
78、3.本发明采用dbscan算法对精简后的点云数据进行聚类,并针对多个聚类集合进行避雷线的识别,在未识别到避雷线时,动态调整dbscan算法的参数,最终获得能够准确分割出避雷线的eps(∈)和minpts参数,提高了避雷线识别和分离的准确性;
79、4.本发明在识别聚类集合中的壁垒线时,首先采用二维图像的大小和颜色参数进行对比识别,提高了系统整体的运算效率。
80、上述说明,仅是本发明技术方案的概述,为了能够更清楚了解本发明技术手段,可依照说明书的内容予以实施,并且为了让本发明的上述说明和其它目的、特征及优点能够更明显易懂,特举较佳实施例,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!