一种多行业二次污染动态来源解析系统及解析方法与流程
本发明涉及计算机,具体而言,涉及一种多行业二次污染动态来源解析系统及解析方法。
背景技术:
1、二次污染物是排入环境中的一次污染物在物理、化学因素或生物的作用下发生变化,或与环境中的其他物质发生反应所形成的物理、化学性状与一次污染物不同的新污染物,又称继发性污染物。
2、如一次污染物二氧化硫在环境中氧化成的硫酸盐气溶胶;汽车废气中的氧化氮、碳氢化合物等在日光的照射下发生光化学反应,生成的臭氧、过氧乙酰硝酸酯(pan)、甲醛和酮类等。
3、按污染源存在的形式分为固定源和流动源两类。
4、所谓固定源就是位置和地点固定不变的污染源。
5、主要指工矿企业在生产中排放的大量污染物。
6、冶金、钢铁、建材等工业企业都是对大气环境污染严重的固定源。
7、流动污染源是指交通工具在行驶时向大气中排放的有害气体而形成的污染源。
8、按人类社会活动功能划分,还可以分为工业污染源、农业污染源、交通运输污染源和生活污染源等。
9、工业污染源:由火力发电、钢铁、化工和硅酸盐等工矿企业在生产过程、中所排放的煤烟、粉尘及有害化合物等形成的污染源。
10、此类污染源由于不同工矿企业的生产性质和流程工艺的不同,其所排放的污染物种类和数量大不相同,但有一个共同的特点是,排放源集中、浓度高、局地污染强度高。
11、是城市大气污染的罪魁祸首。
12、农业污染源:主要是不当施用农药、化肥、有机粪肥等过程产生的有害物质挥发扩散,以及施用后期nox、ch4、挥发性农药成分从土壤中逸散进入大气等形成的污染源。
13、交通运输污染源:由汽车、飞机、火车和轮船等交通运输工具运行时向大气中排放的尾气。
14、这类污染源属流动污染源,主要污染物是烟尘、碳氢化合物、nox、金属尘埃等,是城市大气环境恶化的主要原因之一。
15、生活污染源 是指居民日常烧饭、取暖、沐浴等活动,燃烧化石燃料而向大气排放烟尘、so2 、nox等污染物。
16、这类污染源属固定源,具有分布广、排量大、污染高度低等特点,是一些城市大气污染不可忽视的污染源。
17、但是,随着城市电气化的推进,城市生活污染源将从根本上得到遏制。
18、通常采用对污染物的类别进行检测,从而与对应污染源排放的类别进行匹配,从而找到对应的污染源。
19、这种方法对污染源的判断不够准确。
20、并且由于工业污染源、农业污染源、交通运输污染源和生活污染排放的二次污染物类别存在不同,但也存在重合,所以不能够简单的根据类别不同进行判断。
技术实现思路
1、本发明的目的在于提供了一种多行业二次污染动态来源解析系统及解析方法,用以解决现有技术中存在的上述问题。
2、第一方面,本发明实施例提供了一种多行业二次污染动态来源解析方法,包括:
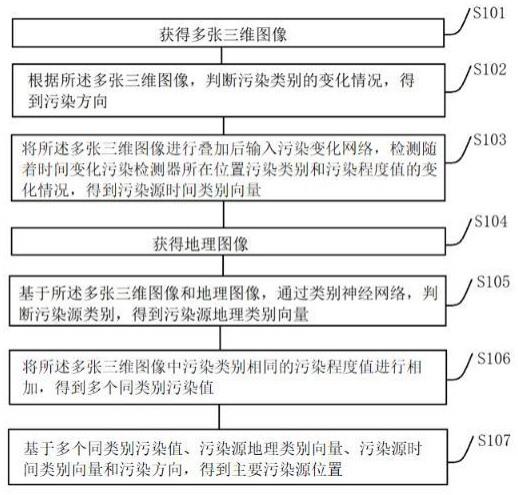
3、获得多张三维图像;所述多张三维图像为不同时间点污染检测器检测得到的图像;所述三维图像中的值表示污染检测器在检测多个区域的污染类别和污染程度值;
4、根据所述多张三维图像,判断污染类别的变化情况,得到污染方向;
5、将所述多张三维图像进行叠加后输入污染变化网络,检测随着时间变化污染检测器所在位置污染类别和污染程度值的变化情况,得到污染源时间类别向量;所述污染源时间类别向量的值表示不同时间的污染源排放不同污染类别的污染物的概率;
6、获得地理图像;所述地理图像表示污染检测器检测得到的图像的区域和污染检测器得到的图像周围的区域的地理情况;所述地理图像为包含污染源的区域;所述地理图像包括工厂位置、交通路线和居民住宅;
7、基于所述多张三维图像和地理图像,通过类别神经网络,判断污染源类别,得到污染源地理类别向量;所述污染源地理类别向量中的值 表示根据不同位置的污染源排放不同判断污染类别的污染物的概率;
8、将所述多张三维图像中污染类别相同的污染程度值进行相加,得到多个同类别污染值;所述同类别污染值表示三维图像所在区域的污染类别对应的污染程度值;
9、基于多个同类别污染值、污染源地理类别向量、污染源时间类别向量和污染方向,得到主要污染源位置。
10、可选的,所述根据所述多张三维图像,判断污染类别的变化情况,得到污染方向,包括:
11、获得第一三维图像;所述第一三维图像为多张三维图像中其中一张图像;
12、获得第一位置;所述第一位置是第一三维图像中其中一个位置;
13、获得第一类别;所述第一类别是第一位置对应的污染类别;
14、获得第二三维图像;所述第二三维图像为多张三维图像中第一三维图像下一时间点的图像;
15、将所述第二三维图像中与第一类别相同的类别的位置进行标记,得到多个第二污染位置;
16、将第一位置和多个第二污染位置分别加入周围8个值,得到第一类别区域和多个第二污染区域;所述第一类别区域包括9个值;所述第二污染区域包括9个值;
17、基于所述多个第二污染区域和第一类别区域,向四周扩展检测,得到第一污染区域和第一原污染区域;所述第一原污染区域表示第一三维图像中与第一污染区域尺寸相同的区域;
18、通过依次遍历第一三维图像中的位置,找到对应的多个污染区域和多个原污染区域;
19、根据所述多个污染区域,得到最优污染区域和最优原污染区域;所述最优污染区域为面积大于其他污染区域的区域;所述最优原污染区域为所述最优污染区域对应的原污染区域;
20、通过多次获取多张三维图像的对应的多个最优污染区域和对应的原污染区域,进行判断,得到污染方向。
21、可选的,所述基于所述多个第二污染区域和第一类别区域,向四周扩展检测,得到第一污染区域和第一原污染区域,包括:
22、将所述多个第二污染区域和第一类别区域对应位置的污染类别判断是否相同,得到多个匹配区域;所述匹配区域为第二污染区域中与第一类别区域对应位置的污染类别相同的区域;所述多个匹配区域的尺寸存在不同;
23、通过多次将多个匹配区域分别加入与边界相邻的值,得到多个扩展匹配区域;
24、通过多次将所述第一类别区域扩展为与扩展匹配区域尺寸相同的区域,得到多个扩展类别区域;一个扩展类别区域对应一个扩展匹配区域;
25、将所述多个扩展类别区域分别与对应的所述多个扩展匹配区域对应位置的污染类别判断是否相同,得到多个第一匹配区域;一个第一匹配区域对应一个扩展类别区域对应一个扩展匹配区域;所述第一匹配区域为扩展匹配区域对中与扩展类别区域对应位置的污染类别相同的区域;
26、通过多次迭代将多个第一匹配区域进行扩展,将所述扩展类别区域扩展为第一匹配区域相同尺寸,判断对应位置的污染类别是否相同,若对应位置的污染类别相同,得到新的匹配区域,直到对应位置的污染类别不相同,得到多个最终匹配区域和多个最终扩展类别区域;一个最终扩展类别区域对应一个最终匹配区域;所述最终匹配区域表示不能够进行匹配后的区域;所述最终扩展类别区域表示最终匹配区域对应的与最终匹配区域尺寸相同的扩展类别区域;
27、将最终匹配区域大于其他最终匹配区域的区域作为第一污染区域,将第一污染区域对应最终扩展类别区域作为第一原污染区域。
28、可选的,所述将所述多张三维图像进行叠加后输入污染变化网络,检测随着时间变化污染检测器所在位置污染类别和污染程度值的变化情况,得到污染源时间类别向量污染程度值,包括:
29、获得检测时间;所述检测时间是多张三维图像对应的时间差;
30、将三维图像进行叠加,得到时间三维图像;
31、将时间三维图像和时间输入第一卷积网络,提取污染特征,得到污染源时间类别向量;所述污染源时间类别向量为一维向量。
32、可选的,所述将时间三维图像和时间输入第一卷积网络,提取污染特征,得到污染源时间类别向量,包括:
33、将第一卷积网络中的多个卷积核与所述时间三维图像的提取特征,得到三维特征图;
34、所述第一卷积网络中用于提取特征的多个卷积核的通道数和时间三维图像对应的多张三维图像对应的个数相同;
35、将所述三维特征图与所述第一卷积网络最后一层的卷积核相乘,得到污染源时间类别向量;
36、所述第一卷积网络最后一层的卷积核的个数和所述时间三维图像对应的多张三维图像对应的个数相同;所述第一卷积网络最后一层的卷积核尺寸与三维特征图的尺寸相同。
37、可选的,所述基于所述多张三维图像和地理图像,通过类别神经网络,判断污染源类别,得到污染源地理类别向量,包括:
38、根据所述地理图像,计算地理图像上的污染源到污染检测器在地理图像的位置的距离,得到距离比例向量;所述距离比例向量中的值表示多个污染源到污染检测器在地理图像的位置的距离的比值;
39、将所述三维图像输入第一类别卷积网络,提取特征,得到第一类别特征向量;所述第一类别特征向量中的值表示污染物的特征;
40、将所述距离比例向量输入比例神经网络,提取特征,得到比例输出向量;所述比例输出向量中的值表示距离比例向量的特征;
41、将第一类别特征向量和比例输出向量输入融合神经网络,进行特征融合,判断污染源类别,得到污染源地理类别向量;
42、所述第一类别卷积网络、比例神经网络和融合神经网络构成类别神经网络。
43、可选的,所述基于多个同类别污染值、污染源地理类别向量、污染源时间类别向量和污染方向,得到主要污染源位置,包括:
44、将污染源地理类别向量中大于地理类别阈值的值对应的类别输入污染源地理类别集合;
45、将污染源时间类别向量中大于时间类别阈值的值对应的类别输入污染源时间类别集合;
46、将污染源地理类别集合和污染源时间类别集合求交集,得到污染源类别集合;
47、根据污染方向和地理图像,得到污染源方向集合;所述污染源方向集合中的值为地理图像中与污染方向对应的直线相交的污染源 ;
48、将污染源方向集合中与污染源类别集合中类别相同的污染源构成污染源集合;
49、获得污染浓度距离比例;所述污染浓度距离比例表示数据库中存储的污染浓度与对应距离的比值;
50、将污染含量除以污染浓度距离比例,得到污染距离;
51、将所述污染源集合中对应污染距离的污染源的位置作为主要污染源位置。
52、可选的,所述通过多次获取多张三维图像的对应的多个最优污染区域和对应的原污染区域,进行判断,得到污染方向,包括:
53、根据所述三维图像构建坐标轴; 将原污染区域对应的第一位置与对应最优污染区域对应的第一位置计算斜率,得到第一污染斜率;
54、通过多次计算多个原污染区域与对应的最优污染区域的斜率,得到多个污染斜率;
55、将多个污染斜率进行聚类,将聚类中心作为污染方向。
56、可选的,所述类别神经网络训练方法,包括:
57、获得训练集;所述训练集包括多个训练数据和对应多个标注数据;所述训练数据包括训练三维图像和训练距离比例向量;所述标注数据表示标注污染源类别;所述标注污染源类别将排放污染的污染源的值设为1,将不排放污染的污染源设为0;
58、将所述训练数据输入类别卷积网络,提取三维图像中污染类别和污染程度值的特征,得到训练污染源类别向量;
59、将所述训练污染源类别向量和标注污染源类别求取损失,得到损失值;
60、获得类别神经网络当前的训练迭代次数以及预先设定的所述类别神经网络训练的最大迭代次数;
61、当所述损失值小于或等于阈值或训练迭代次数达到所述最大迭代次数时停止训练,得到训练好的类别神经网络。
62、第二方面,本发明实施例提供了一种多行业二次污染动态来源解析系统,包括:
63、获取模块:获得多张三维图像;所述多张三维图像为不同时间点污染检测器检测得到的图像;所述三维图像中的值表示污染检测器在检测多个区域的污染类别和污染程度值;获得地理图像;所述地理图像表示污染检测器检测得到的图像的区域和污染检测器得到的图像周围的区域的地理情况;所述地理图像为包含污染源的区域;所述地理图像包括工厂位置、交通路线和居民住宅;
64、污染方向模块:根据所述多张三维图像,判断污染类别的变化情况,得到污染方向;
65、污染源时间类别模块:将所述多张三维图像进行叠加后输入污染变化网络,检测随着时间变化污染检测器所在位置污染类别和污染程度值的变化情况,得到污染源时间类别向量;所述污染源时间类别向量的值表示不同时间的污染源排放不同污染类别的污染物的概率;
66、污染源地理类别模块:基于所述多张三维图像和地理图像,通过类别神经网络,判断污染源类别,得到污染源地理类别向量;所述污染源地理类别向量的值表示不同位置的污染源排放不同污染类别的污染物的概率;
67、污染含量模块:将所述多张三维图像中污染类别相同的污染程度值进行相加,得到多个同类别污染值;所述同类别污染值表示三维图像所在区域的污染类别对应的污染程度值;
68、主要污染源位置判断模块:基于多个同类别污染值、污染源地理类别向量、污染源时间类别向量和污染方向,得到主要污染源位置。
69、相较于现有技术,本发明实施例达到了以下有益效果:
70、本发明提供了一种多行业二次污染动态来源解析方法和系统,所述方法包括:获得多张三维图像。
71、所述多张三维图像为不同时间点污染检测器检测得到的图像。
72、所述三维图像中的值表示污染检测器在检测多个区域的污染类别和污染程度值。
73、根据所述多张三维图像,判断污染类别的变化情况,得到污染方向。
74、将所述多张三维图像进行叠加后输入污染变化网络,检测随着时间变化污染检测器所在位置污染类别和污染程度值的变化情况,得到污染源时间类别向量。
75、所述污染源时间类别向量的值表示不同时间的污染源排放不同污染类别的污染物的概率。
76、获得地理图像。
77、所述地理图像表示污染检测器检测得到的图像的区域和污染检测器得到的图像周围的区域的地理情况。
78、所述地理图像为包含污染源的区域。
79、所述地理图像包括工厂位置、交通路线和居民住宅。
80、基于所述多张三维图像和地理图像,通过类别神经网络,判断污染源类别,得到污染源地理类别向量。
81、所述污染源地理类别向量的值表示不同位置的污染源排放不同污染类别的污染物的概率。
82、将所述多张三维图像中污染类别相同的污染程度值进行相加,得到多个同类别污染值。
83、所述同类别污染值表示三维图像所在区域的污染类别对应的污染程度值。
84、基于多个同类别污染值、污染源地理类别向量、污染源时间类别向量和污染方向,得到主要污染源位置。
85、由于工业污染源、农业污染源、交通运输污染源和生活污染排放的污染物类别存在不同,所以可以采用对污染物类别情况和浓度情况判断。
86、分别采用不同类型的污染源排放污染物的时间不同、不同的污染源排放的污染物、污染物在不同时间的类别变化及污染物的移动方向和污染物含量对应的污染源距离对主要排放污染物的污染源进行准确判断。
87、同时,针对污染物易飘离的特性容易影响方向预测的准确性,本发明的技术方案采用迭代进行对比尺寸匹配得到污染物的移动方向,能够解决污染物易飘离影响的方向预测准确性的技术问题,能够提高方向预测的准确性。
88、同时将叠加多个时间的三维图像,输入第一卷积网络,得到污染源时间类别向量。
89、叠加多个时间的三维图像的时间信息得到增强,基于此,将叠加多个时间的三维图像,输入第一卷积网络,通过第一卷积网络快速地进行判断,可以判断因排放时间不同的对应的污染源,增加了对污染源判断的准确性。
90、所述污染地理类别向量,因为不同位置不同类别的污染源排放的污染物的浓度和类别不同,采用对三维图像的污染特征进行提取,对到污染检测器在地理图像的位置的距离的比值进行特征提取,融合两个特征,使得距离比值向量能够对三维图像的污染特征建立关系,从而计算得到不同位置污染源排放不同判断污染类别的概率。
- 还没有人留言评论。精彩留言会获得点赞!