一种三维隧道岩体结构精细模型建立方法及系统
本发明属于隧道工程领域,具体涉及一种三维隧道岩体结构精细模型建立方法及系统。
背景技术:
1、随着数字化技术的逐渐发展,隧道、桥梁等方面的三维可视化展示方面均受到影响,然而在工程当中,包括各类建筑物的设计和地质信息,大多数以二维的方式存在,其中不可避免地在数据采集过程中,产生数据不准确和不够精细化的问题,极易造成工程上的损失和资源的浪费。相比二维图像,三维展示可以直观地表达结构的空间状态,尤其在隧道这种复杂的环境中,通过三维地质模型可以全方位地展示岩体之间的位置关系,对后续爆破设计或开挖施工具有重要的指导意义。
2、目前,有很多具体地方法可以获取到三维结构模型,但普遍缺少了精确性和说服性,通过借助科学技术手段对施工进行指导,是未来隧道工程中的大趋势。通常在隧道施工当中,不可控的因素较多,对隧道内岩体的内部信息了解不全面,因此要通过技术手段消除因岩体安全隐患的存在对工程带来的危害。近年来激光技术的飞速发展,其中,三维激光扫描技术逐渐应用于地下工程,但生成的模型数据过于单一,岩体外部模糊不清,表面裂隙不明显,岩体内部信息无从探知,对于复杂的岩体状况一步不能精确显示。现存的建立精细化模型的方法较少,存在偏差,容易对工程指导方面出现判断失误等问题,增加施工难度,极易造成安全隐患。
3、综上,提出一种精细模型建立方法或系统或许对施工具有重要的价值。
技术实现思路
1、本发明提出一种三维隧道岩体结构精细模型建立方法及系统,其目的在于解决现存的建立精细化模型的方法较少,且存在偏差,容易对工程指导方面出现判断失误的问题。
2、为实现上述目的,具体技术方案如下:
3、本发明一方面提出一种三维隧道岩体结构精细模型建立方法,步骤为:
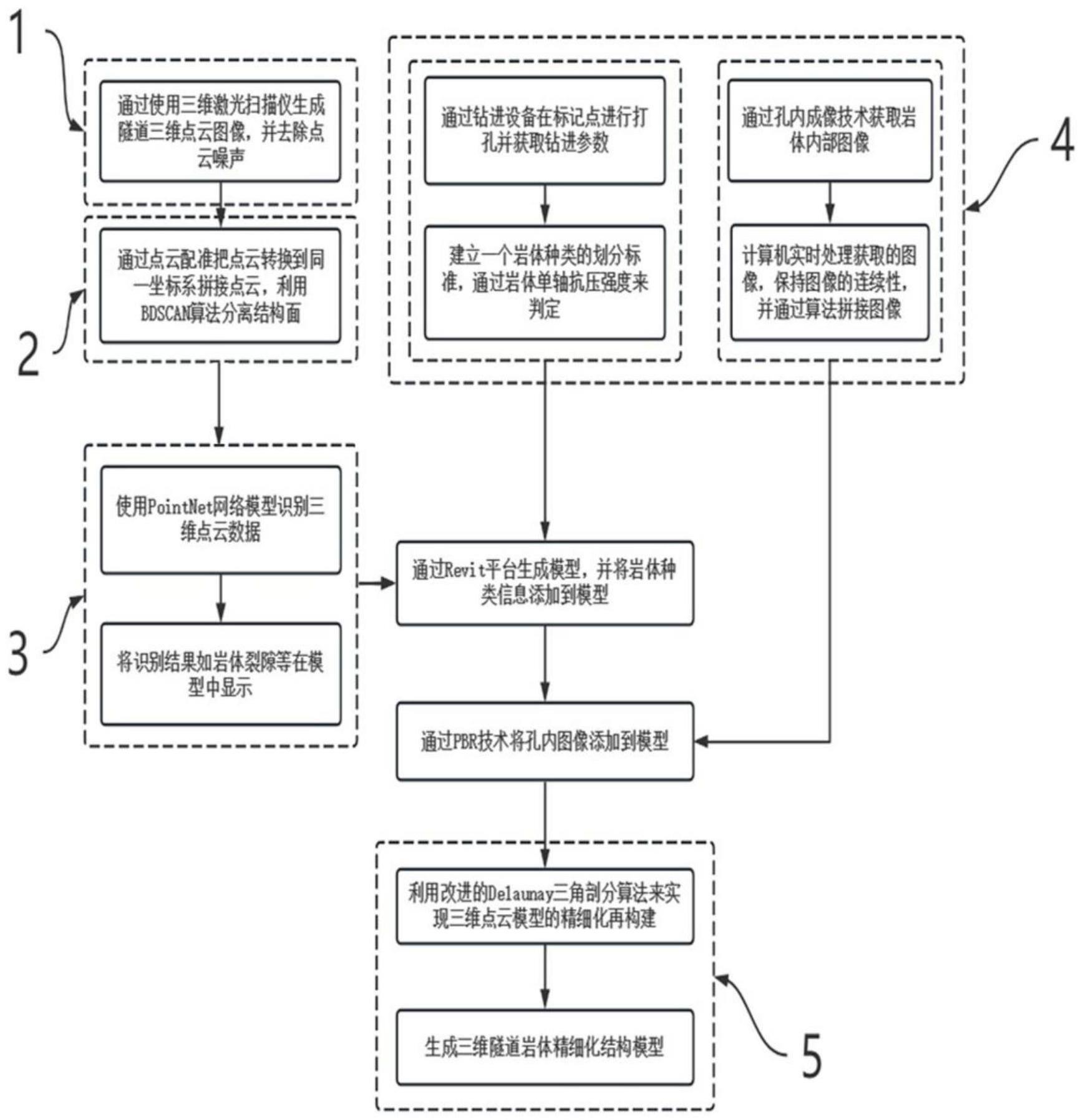
4、步骤(一)通过三维激光扫描仪获取隧道掌子面点云图像,初步生成三维点云模型;
5、步骤(二)将步骤(一)获得的三维点云模型输入至点云处理模型,点云处理模型将三维点云模型的点坐标数据转换成大地坐标系统;利用邻域平均法去除三维点云模型中的噪声;再通过对点云模型进行降维处理后,使用dbscan算法快速分离隧道掌子面和峒壁的结构面;
6、步骤(三)将步骤(二)中隧道掌子面的结构面输入至机器视觉模型,机器视觉模型利用图卷积神经网络gcn识别三维点云模型中的隧道掌子面的结构面,通过revit平台使识别结果显示在三维点云模型当中,得到实现隧道外部信息填充的三维隧道岩体结构模型;
7、步骤(四)通过孔内探测模型使用钻孔设备进行打孔,观测钻进过程与钻进参数的规律,获取岩体内部的岩性信息得到岩石单轴抗压强度σ;并通过改进的反距离加权平均插值方法idw将钻孔过程中未探测区域的坐标信息表达出来,将岩石单轴抗压强度σ和未探测区域的坐标信息输入revit平台,得到利用颜色表示不同岩体强度信息的三维隧道岩体结构模型;
8、步骤(五)通过孔内探测模型的孔内成像技术得到孔内壁全景图像和孔内岩体坐标信息;
9、步骤(六)使用pbr技术来将步骤(五)中获得的孔内壁全景图像和岩体信息渲染到步骤(四)中得到的三维隧道岩体结构模型中,根据孔内壁全景图像体现岩体内部分层界面,再结合岩体信息反映了岩体内部分层界面的变化趋势,保持界面平顺,实现隧道内部信息的填充,并利用ostu算法实现孔内裂隙信息的获取,实现隧道内部信息的填充,进一步精细三维隧道岩体结构模型;
10、步骤(七)将步骤(三)和步骤(六)处理后的三维隧道岩体结构模型输入到精细化处理模型,用改进的delaunay三角剖分算法进行三维隧道岩体结构模型的精细化再构建,生成了包含隧道内岩体外部及内部信息的三维隧道岩体结构精细化模型。
11、进一步的,步骤(二)中所述的dbscan算法步骤为:
12、(1)首先将三维点云模型划分正方体网格区域,每个正方体网格包含至少50个点云数据;
13、(2)在正方体网格区域内生成一个边长为正方体网格二分之一的小正方体,小正方体从正方体网格区域内的一个角开始,以固定距离沿着边移动遍历正方体网格区域,每次移动记录小正方体内的点云数据数量,直至遍历整个正方体网格区域;
14、(3)标记小正方体内点云数据数量最多的区域位置,将此小正方体放大但点的大小不变,直至放大到与正方体网格区域同样大小并替代正方体网格区域,作为新的正方体网格区域;将上述步骤重复两次到四次,将三维点云模型降维并尽可能保留特征;
15、(4)在三维点云模型中,选取隧道掌子面和峒壁间的随机散点,包括最近点和最远点,求出选取随机散点之间的距离l并求出平均值作为领域半径eps,具体公式如下:
16、
17、
18、式中:l为随机散点之间的距离;x、y、z,x0、y0、z0为两随机散点的坐标;领域半径eps用r来表示;l1…ln为不同随机散点之间的距离;n为数量;
19、(5)通过随机选择多个步骤(3)中新的正方体网格区域内的点云数据,点云数据数量的平均数量作为最小点密度minpts;
20、(6)三维点云模型的类别设置为2类,一类为掌子面,另一类为峒壁;每个点云数据在邻域半径eps中包含的点云数据不能少于最小点密度minpts,否则划分为另一类,从而实现隧道掌子面和峒壁的结构面的分离。
21、进一步的,步骤(四)中改进的反距离加权平均插值方法idw的表达公式为:
22、
23、式中:g为待插值点要素估计值;di为待插值点与第i个样本空间位置之间的欧式距离;n为估算中控制点数目,λ为距离参数。
24、进一步的,步骤(七)中改进的delaunay三角剖分算法步骤为:
25、(1)根据步骤(二)得到的隧道掌子面和峒壁的结构面的面积将点云数据分割成若干大小的矩形块;
26、(2)在矩形块区域中点云数据集中的部分边缘选取两个点云数据,连接形成起始的边长,以起始的边长中心为圆心,搜索半径内距离圆心所在边长垂直距离最近的点作为第三点构造起始三角形;
27、(3)通过以起始三角形的边长为待扩展边以搜索半径内距离圆心所在边长垂直距离最近的点,并生成起始扩展三角形,搜索点的位置始终在起始扩展三角形的外侧,后续选取散点的位置均在起始扩展三角形的外侧并形成扩展三角形;通过计算出扩展三角形和起始扩展三角形的法向量夹角,选择夹角最大的扩展三角形作为最后的扩展三角形;
28、(4)通过上述步骤不断生成n个扩展三角形,并完成区域内的网格划分;将划分的区域连通,从而获得完整的三维点云模型。
29、进一步的,步骤(4)中划分的区域中包含边界区域,边界区域生成光滑的三角网格曲面的方法为:选取距离起始区域连接的边缘最近的两个点,再选取与起始区域相连接的区域中距离相连接的边缘最近的两个点,通过选取的四个点生成一个球体,然后标记一个中心点,由四个点中两两相距最远的两个点连接线的交点作为中心点,垂直于两条连接线在中心点向两端做垂直线,先接触球体的点作为连接点,连接区域内选取的两个点,并生成三角形,最后连接所有连接点,生成光滑的三角网格曲面。
30、本发明另一方法提出一种三维隧道岩体结构精细模型建立方法的系统,所述系统包括三维激光扫描仪、点云处理模型、机器视觉模型、孔内探测模型和精细化处理模型,三维激光扫描仪、点云处理模型和机器视觉模型依次连接,机器视觉模型和孔内探测模型均连接精细化处理模型;
31、三维激光扫描仪用于获取隧道掌子面和峒壁的点云数据;
32、点云处理模型用于去除隧道掌子面和峒壁的点云数据的噪声和利用dbscan算法分离隧道掌子面和峒壁;
33、机器视觉模型用于获取隧道岩体外部信息;
34、孔内探测模型用于获取隧道岩体内部的信息;
35、精细化处理模型用于对三维隧道岩体结构模型进一步精细化再构建。
36、本发明还提出一种电子设备,包括存储器和处理器,存储器存储有计算机程序,所述的处理器执行所述计算机程序时,实现所述的三维隧道岩体结构精细模型建立方法的步骤。
37、本发明还提出一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现三维隧道岩体结构精细模型建立方法。
38、本发明的有益成果:
39、通过建立三维隧道岩体结构精细模型,可提供大量实用参考信息,全方位展示出岩体结构的关系,对后续施工如爆破具有重要的指导意义;
40、通过三维激光扫描取代传统摄像方式获取岩体信息,避免了因环境较暗造成的成像不清晰、测量效率和精度低、测量安全性差等缺点;
41、对隧道三维模型的建立可极大程度上提供后续现场爆破或技术方案的指导,避免了因误差较大而造成影响,保护了生命财产的损失;
42、通过结合三维激光扫描仪、点云处理模型、机器视觉模型、孔内探测模型和精细化处理模型可展示出隧道岩体内部及外部的细节信息,增加隧道施工中的安全性和对施工过程的掌控。
- 还没有人留言评论。精彩留言会获得点赞!