复杂场景下合成孔径声纳图像多尺度目标检测方法及系统
本发明涉及水声信号处理领域,尤其涉及复杂场景下合成孔径声纳图像多尺度目标检测方法及系统。
背景技术:
1、合成孔径声纳(synthetic aperture sonar,sas)是一种高分辨率水下成像声纳,其基本原理是利用小孔径基阵的移动形成虚拟大孔径,从而获得方位向的高分辨率。与普通侧扫声纳相比,sas最为显著的优点是方位向分辨率较高,且理论分辨率与目标距离以及采用的声波频段无关。合成孔径声纳图像目标检测任务在水下无人平台自主导航和搜索发挥着重要作用。考虑水底环境的复杂性以及水下目标尺寸的多样性,这会进一步增加目标检测的难度。
2、传统的检测和识别方法包括:人工判读和模式识别。众所周知,人工判读存在效率低、耗时长、主观不确定性大和经验依赖性强等问题,而模式识别通过人工提取灰度、纹理、边缘和形状等特征,经过图像和数据处理后设计分类器进行判别。上述方法适用于简单或者特征明显的目标判别,对于复杂场景下的水下目标,传统特征提取算法存在特征设计难度大、运算冗余以及泛化性和鲁棒性差等问题。近年来,随着计算机视觉领域的蓬勃发展,基于深度学习的目标识别与检测相关技术研究正在开展,尤其是以卷积神经网络(convolutional neural networks,cnn)代替人工判读和模式识别。因此,通过借鉴深度学习技术提高sas图像感兴趣小目标的检测识别精度具有重要的理论和实践意义.williams等人利用cnn对sas图像目标进行分类识别,提高了sas图像目标的分类准确率。mckay等人在cnn的基础上,通过迁移学习进一步提高了sas图像水下目标的分类准确率。williams等人通过分析cnn的计算复杂度,选取参数更少的网络来对水下目标进行分类识别。上述三种sas图像水下目标识别方法主要是利用cnn对sas图像进行分类识别,因此无法获取图像内目标的位置信息。目前,基于cnn的目标检测模型在一个框架内实现了目标检测和识别的统一.li等提出了基于ssd的水下多尺度目标检测方法,不过,该方法不能适用复杂场景下的sas图像多尺度目标检测。tang等人利用faster r-cnn网络实现了声纳图像海底沉船目标的自动检测。faster-rcnn考虑正负样本的平衡性,设置正负区域交并比(intersectionover union,iou)为0.5,这使得其目标检测并不是很准确,因为iou=0.5时区域内含有较多背景,造成很多误检,而直接使用提高iou的阈值会造成正负样本不均衡问题,使得漏检率大大提高。
3、综上所述,目前急需一种适用复杂场景下sas图像多尺度目标检测精度的方法,以提高后续目标精细化识别的准确率与效率。
技术实现思路
1、本发明的目的在于克服现有技术缺陷,提出了复杂场景下合成孔径声纳图像多尺度目标检测方法及系统。
2、为了实现上述目的,本发明提出了一种复杂场景下合成孔径声纳图像多尺度目标检测方法,所述方法包括:
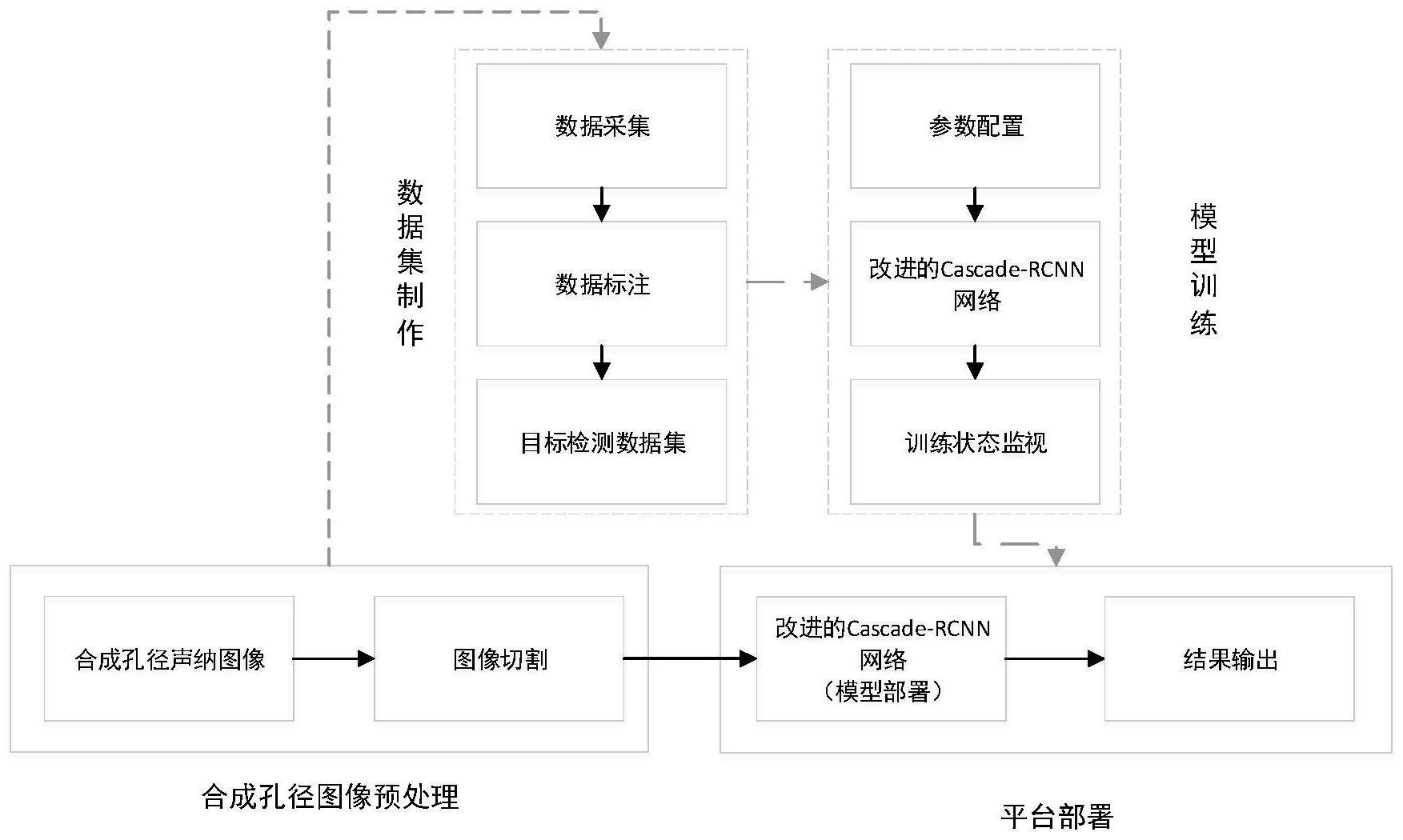
3、步骤1)对阵元接收的声学回波数据进行处理,得到满足尺寸要求的合成孔径声纳图像;
4、步骤2)将标准尺寸合成孔径声纳图像输入预先建立和训练好的目标检测模型,实现水下多尺度目标检测;
5、所述目标检测模型为改进的cascade-rcnn网络,所述改进的cascade-rcnn网络包括高分辨率骨干网络,高分辨率骨干网络采用改进的特征提取模块。
6、优选的,所述步骤1)具体包括:
7、对阵元接收到的声学回波数据进行处理,得到合成孔径声纳图像,再基于图像宽度进行切割,得到满足尺寸要求的合成孔径声纳图像。
8、优选的,所述改进的cascade-rcnn网络包括依次连接的:
9、高分辨率骨干网络,用于作为特征提取的骨干网络来构建多层次表征;
10、区域提案网络,用于生成候选目标边界框提案;
11、特征融合网络,用于对多尺度特征进行融合增强;
12、具有阈值的三个级联对象检测器,用于进行边界框回归和分类;和
13、soft nms模块,用于获得最终的水下多尺度目标检测结果。
14、优选的,所述改进的特征提取模块的输入为特征d,输出dbbss为:
15、dbbss=d+dsim;
16、其中,dsim为第一支路的输出,所述第一支路为依次连接的第一3x3卷积层单元、sge组件、第二3x3卷积层单元和sim组件,所述第一3x3卷积层单元包括bn层和relu层,第二3x3卷积层单元包括bn层。
17、优选的,所述第一支路的处理过程具体包括:
18、输入特征d经过第一个3x3卷积层单元,其输出特征d1为:
19、d1=f1(d),d∈φh×h×m
20、其中,h×h为输入特征的尺寸,m为输入特征的通道数,φ表示特征图,f1为第一个3x3卷积层单元;
21、d1进入sge组件,按通道维度将d1分为g个组,对每个组进行单独处理,sge组件输出特征dsge,其中第i个输出特征为:
22、
23、其中,为第i个卷积组,σ()为激活函数,ai为第i个卷积组的注意力系数,满足下式:
24、
25、其中,γ和β分别表示第i个卷积组的权重和偏置,为量化后的第i个卷积组注意力系数:
26、
27、ε=1e-5,ci为第i个卷积组经过全局平均池化操作得到特征系数,σc和μc均为中间变量,cj为第j个卷积组经过全局平均池化操作得到特征系数,m表示卷积组总数;
28、dsge经过第二个3x3卷积层单元,其输出特征d2为:
29、d2=f2(dsge),dsge∈φh×h×m
30、其中,f2为第二个3x3卷积层单元;
31、d2经过sim组件的输出dsim为:
32、
33、其中,sigmoid()表示s型函数,e表示sim组件单个通道所有神经元组成的能量矩阵,其中的某个神经元t的能量函数et为:
34、
35、其中,xi表示sim组件单个通道t以外的其他神经元,wt和bt为神经元t线性变换后的权重和偏置,λ为权重系数,n为单个通道的神经元个数。
36、优选的,所述方法还包括目标检测模型的训练步骤,具体包括:
37、从真实水下环境中采集原始声纳数据,经处理得到标准尺寸合成孔径声纳图像,并进行标注生成训练集;
38、将训练集数据依次输入改进的cascade-rcnn网络,直至满足训练要求,得到训练好的目标检测模型。
39、另一方面,本发明提出了一种复杂场景下合成孔径声纳图像多尺度目标检测系统,所述系统包括:
40、处理模块,用于对阵元接收的声学回波数据进行处理,得到标准尺寸合成孔径声纳图像;
41、平台部署模块,用于将预先建立和训练好的目标检测模型部署到嵌入式平台;和
42、检测输出模块,用于将标准尺寸合成孔径声纳图像输入部署在嵌入式平台的目标检测模型,实现水下多尺度目标检测;
43、所述目标检测模型为改进的cascade-rcnn网络,所述改进的cascade-rcnn网络包括高分辨率骨干网络,高分辨率骨干网络采用改进的特征提取模块。
44、优选的,所述处理模块包括:
45、合成孔径声纳子模块,用于对接收到的声学回波数据进行处理,得到合成孔径声纳图像;和
46、图像切割子模块,用于基于图像宽度对合成孔径声纳图像进行切割,得到满足尺寸要求的合成孔径声纳图像,以保证水下目标的完整性。
47、与现有技术相比,本发明的优势在于:
48、1、本发明将合成孔径声纳与改进的cascade-rcnn目标检测相结合,提出了一种水下环境智能感知方法,该方法以端到端的方式解决现有方法虚警率高以及多尺度目标检测精度低的问题,该方法可对复杂场景的水下多尺度目标进行检测,有效降低了复杂场景下目标检测的虚警率,并通过在标准特征提取模块中引入(spatial group-wise enhance,sge)组件和(a simple,parameter-free attention module,sim)组件提高了目标检测的精度,为基于sas图像的水下目标检测任务提供了一种有效解决的手段;
49、2、与现有技术yolox、yolof、centernet、faster-rcnn、dynamic-rcnn、cascade-rcnn相比,本发明方法的检测精度明显提高,可以准确的检测水下多尺度目标,并且对复杂的地貌特征具有较好的抑制效果。
- 还没有人留言评论。精彩留言会获得点赞!