驾驶轨迹的决策方法及装置、设备、计算机可读存储介质与流程
本技术涉及汽车领域,尤其涉及一种驾驶轨迹的决策方法及装置、计算机可读存储介质。
背景技术:
1、自动驾驶车辆是集环境感知、规划决策、行为控制与执行等多项功能于一体的综合智能系统,涵盖了机械、控制、传感器技术、信号处理、模式识别、人工智能和计算机技术等多学科知识。研制具有自主行驶能力的智能车辆,对研发具有我国自主知识产权的车辆主动安全辅助驾驶产品、提高我国自主品牌汽车的智能化水平、改善道路交通安全状况、发展智能交通系统,具有重要的现实意义。在自动驾驶车辆中,决策规划是其中的关键技术,也是当前研究的热点和难点问题,它衔接感知、预测与控制,是体现智能性的重要部分。因此,决策规划算法研究对提升自动驾驶系统的性能有着重要的意义。
2、现有技术是基于规则状态机及几何曲线进行轨迹决策规划,由于没有考虑场景的复杂性,导致轨迹决策的准确性差。
技术实现思路
1、本技术实施例提供一种驾驶轨迹的决策方法及装置、设备、计算机可读存储介质,能够提高驾驶轨迹的决策的准确性。
2、本技术的技术方案是这样实现的:
3、本技术实施例提供了一种驾驶轨迹的决策方法,所述方法包括:
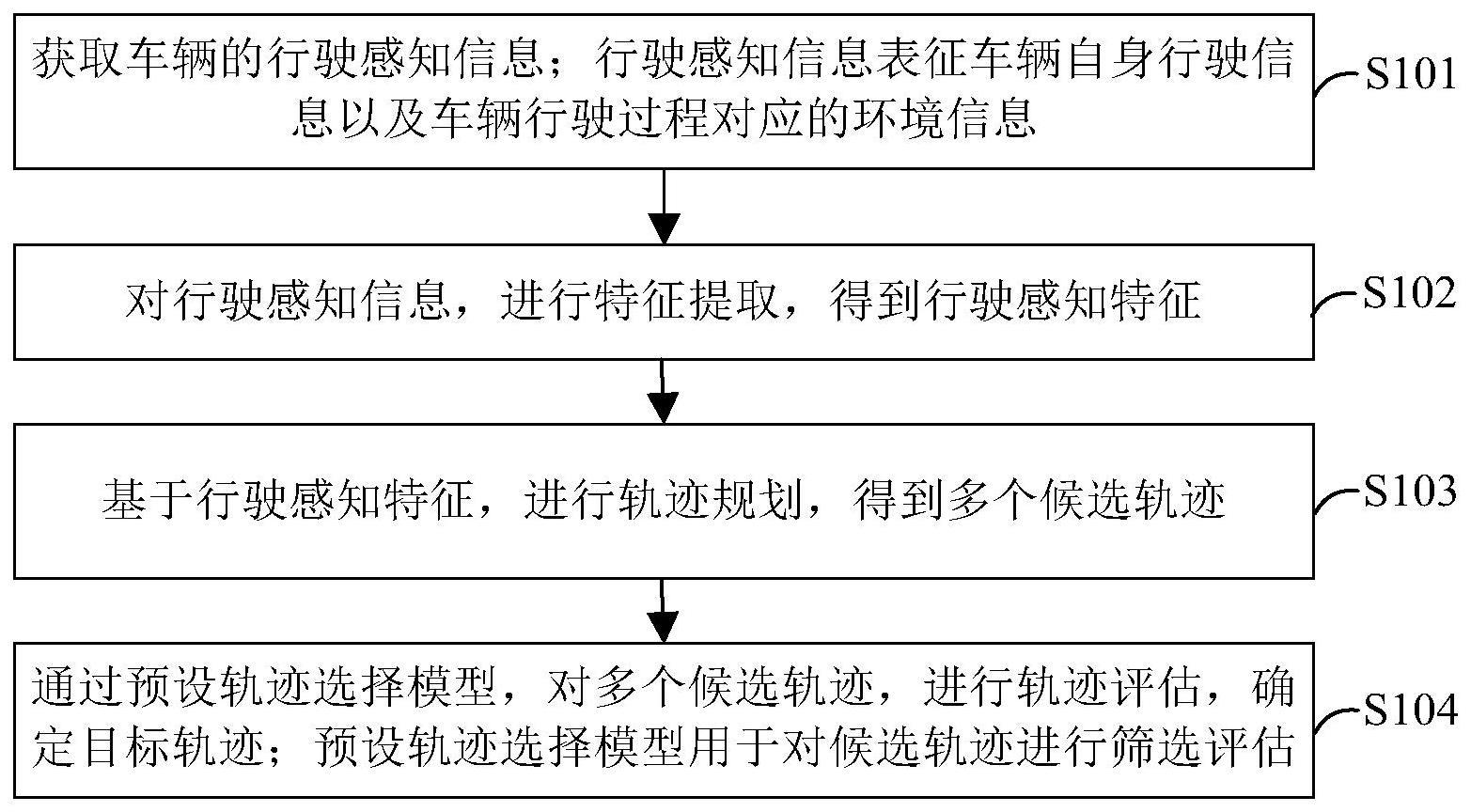
4、获取车辆的行驶感知信息;所述行驶感知信息表征车辆自身行驶信息以及车辆行驶过程对应的环境信息;
5、对所述行驶感知信息,进行特征提取,得到行驶感知特征;
6、基于所述行驶感知特征,进行轨迹规划,得到多个候选轨迹;
7、通过预设轨迹选择模型,对所述多个候选轨迹,进行轨迹评估,确定目标轨迹;所述预设轨迹选择模型用于对候选轨迹进行筛选评估。
8、上述方案中,所述通过预设轨迹选择模型,对所述多个候选轨迹,进行轨迹评估,确定目标轨迹,包括:
9、将所述多个候选轨迹,输入到所述预设轨迹选择模型中进行轨迹评估,得到初始目标轨迹;
10、对所述初始目标轨迹,进行安全评估,得到所述目标轨迹。
11、可以理解的是,将多个候选轨迹,输入到预设轨迹选择模型中进行轨迹评估,得到初始目标轨迹,对初始目标轨迹,进行安全评估,确定目标轨迹,由于添加了安全评估,使得确定的目标轨迹安全性更高,进而提高驾驶轨迹的决策的准确性。
12、上述方案中,所述对所述初始目标轨迹,进行安全评估,得到所述目标轨迹,包括:
13、通过预设安全规则,对所述初始目标轨迹进行安全评估;所述预设安全规则用于筛除不安全的驾驶轨迹;
14、若所述初始目标轨迹符合所述预设安全规则,则将所述初始目标轨迹作为所述目标轨迹;
15、若所述初始目标轨迹不符合所述预设安全规则,则继续对所述多个候选轨迹,进行轨迹评估,直至确定符合所述预设安全规则的所述目标轨迹。
16、可以理解的是,通过预设安全规则对初始目标轨迹进行安全评估,可以去除不安全的轨迹,使得确定的目标轨迹安全性更高。
17、上述方案中,所述行驶感知信息包括:车辆行驶信息和环境信息;
18、所述对所述行驶感知信息,进行特征提取,得到行驶感知特征,包括:
19、对所述车辆行驶信息,进行特征提取,得到车辆行驶特征;
20、对所述环境信息,进行特征提取,得到环境特征;
21、将所述车辆行驶特征和所述环境特征,确定为所述行驶感知特征。
22、可以理解的是,对车辆行驶信息,进行特征提取,得到车辆行驶特征;对环境信息,进行特征提取,得到环境特征,将车辆行驶特征和环境特征,确定为行驶感知特征,便于后续根据行驶感知特征进行轨迹规划。
23、上述方案中,所述基于所述行驶感知特征,进行轨迹规划,得到多个候选轨迹,包括:
24、将所述行驶感知特征和地图信息进行结合,确定多个候选车道;
25、对所述多个候选车道进行筛选处理和平滑处理,得到第一候选车道和坐标区域;
26、基于所述第一候选车道和坐标区域,进行轨迹规划,得到所述多个候选轨迹。
27、可以理解的是,将行驶感知特征和地图信息进行结合,确定多个候选车道;对多个候选车道进行筛选处理和平滑处理,得到第一候选车道和坐标区域,可以确定车辆的行驶区域,再基于第一候选车道和坐标区域,进行轨迹规划,得到多个候选轨迹,在确定车辆的行驶区域之后,进行轨迹规划,可以提高轨迹规划的准确性。
28、上述方案中,所述基于所述第一候选车道和坐标区域,进行轨迹规划,得到所述多个候选轨迹,包括:
29、基于所述第一候选车道和所述坐标区域,确定约束准则;所述约束准则表征车辆行驶过程中需要满足的多种限制条件;
30、基于所述第一候选车道、所述坐标区域和所述约束准则,进行轨迹规划,得到所述多个候选轨迹。
31、可以理解的是,通过第一候选车道和坐标区域,确定约束准则,再基于一候选车道、坐标区域和约束准则,进行轨迹规划,得到多个候选轨迹,轨迹规划过程中考虑了约束条件,使得得到的多个候选轨迹更加安全。
32、上述方案中,所述基于所述第一候选车道和所述坐标区域,确定约束准则,包括:
33、基于所述第一候选车道和所述坐标区域,确定交规约束;所述交规约束表征车辆行驶过程中需要满足的交通规则;
34、基于环境特征,确定场景任务约束;
35、根据所述交规约束和所述场景任务约束,确定路径约束和速度约束;
36、将所述路径约束和所述速度约束,确定为所述约束准则。
37、可以理解的是,基于第一候选车道和坐标区域,确定交规约束;基于环境环境特征,确定场景任务约束,从而确定路径约束和速度约束,便于后续根据约束准则进行轨迹规划,提高轨迹规划的有效性。
38、上述方案中,所述通过预设轨迹选择模型,对所述多个候选轨迹,进行轨迹评估,确定目标轨迹之前,所述方法还包括:
39、获取车辆的多个历史数据;
40、对所述多个历史数据,进行特征提取和特征分析,确定多个历史候选轨迹;
41、通过所述多个历史候选轨迹,对初始轨迹选择模型进行训练,确定所述预设轨迹选择模型。
42、可以理解的是,获取车辆的多个历史数据,对多个历史数据,进行特征提取和特征分析,确定多个历史候选轨迹,通过多个历史候选轨迹,对初始轨迹选择模型进行训练,确定预设轨迹选择模型,由于对多个历史数据,进行特征提取和特征分析,筛选了用于训练的多个历史候选轨迹,通过多个历史候选轨迹,对初始轨迹选择模型进行训练,可以提高预设轨迹选择模型的决策能力,进而提高驾驶轨迹的决策的准确性。
43、上述方案中,所述通过所述多个历史候选轨迹,对初始轨迹选择模型进行训练,确定所述预设轨迹选择模型,包括:
44、对所述多个历史候选轨迹,进行网格图化处理和平面化处理,得到处理后的多个历史候选轨迹;
45、通过所述处理后的多个历史候选轨迹,对所述初始轨迹选择模型进行训练,直至所述初始轨迹选择模型的评价指标值大于预设阈值,确定所述预设轨迹选择模型;所述评价指标值包括准确率、精准率、召回率和综合评分。
46、可以理解的是,通过对多个历史候选轨迹,进行网格图化处理和平面化处理,得到处理后的多个历史候选轨迹,使得处理后的多个历史候选轨迹符合模型的输入类型,便于对初始轨迹选择模型进行训练,进而提高预设轨迹选择模型的决策的准确性。
47、本技术实施例提供了一种驾驶轨迹的决策装置,所述驾驶轨迹的决策装置包括:获取单元和确定单元,其中,
48、所述获取单元,用于获取车辆的行驶感知信息;所述行驶感知信息表征车辆自身行驶信息以及车辆行驶过程对应的环境信息;对所述行驶感知信息,进行特征提取,得到行驶感知特征;基于所述行驶感知特征进行轨迹规划,得到多个候选轨迹;
49、所述确定单元,用于通过预设轨迹选择模型,对所述多个候选轨迹,进行轨迹评估,确定目标轨迹;所述预设轨迹选择模型用于对候选轨迹进行筛选评估。
50、本技术实施例提供了一种驾驶轨迹的决策设备,包括:
51、存储器,用于存储可执行数据指令;
52、处理器,用于执行所述存储器中存储的可执行指令,当所述可执行指令被执行时,所述处理器执行所述的驾驶轨迹的决策方法。
53、本技术实施例提供了一种计算机可读存储介质,存储有可执行指令,当所述可执行指令被一个或多个处理器执行的时候,所述处理器执行所述的驾驶轨迹的决策方法。
54、本技术实施例提供了一种驾驶轨迹的决策方法及装置、设备、计算机可读存储介质,其中,方法包括:获取车辆的行驶感知信息;基于所述行驶感知信息,进行特征提取,得到行驶感知特征;基于所述行驶感知特征,进行轨迹规划,得到多个候选轨迹;通过预设轨迹选择模型,对所述多个候选轨迹,进行轨迹评估,确定目标轨迹;所述预设轨迹选择模型用于对候选轨迹进行筛选评估。上述方案中,可以根据行驶感知特征,进行轨迹规划,得到多个候选轨迹,通过预设轨迹选择模型,进行轨迹评估,确定目标轨迹,由于预设轨迹选择模型是按照一定准确率提前训练好的,用于对候选轨迹进行筛选评估,可以从多个候选轨迹中筛选出最优轨迹,即目标轨迹,可以提高驾驶轨迹的决策的准确性。
- 还没有人留言评论。精彩留言会获得点赞!