本发明属于元宇宙与虚拟,具体涉及到一种基于元宇宙的实验仿真方法。
背景技术:
1、vr(virtual reality)技术全称为虚拟现实技术,是一种突破性的新型科技手段与技术。有别于传统的研究手段,vr技术突破了人类对于时间、空间、视觉、听觉、嗅觉等各方面的生理束缚与限制,使得现实中所暂时无法实现的研究方法在虚拟世界中得以展现。vr技术在使用户获得沉浸式体验的同时,将加速突破各领域内的难题与瓶颈,是一项具有广阔前景的新兴科技手段。
2、实验仿真系统通过模拟虚拟实验环境,让教师和学生能够高效地完成专业教学内容。但由于近年来实验环境日趋复杂,实验效果的要求也日益增高,传统的实验仿真系统已经出现诸多包括真实性和交互性方面的局限性,改进已有的实验仿真系统和发明新的实验仿真逐渐变得重要。
3、现今高校中的实验仿真系统中,存在两类现象:以交互性为主的实验仿真系统往往是简单的基础性实验,具有交互功能的大多数是简单的工具,无法突出虚拟实验仿真系统的优越性;而大型实验的仿真系统中,虽然具有大型设备,但往往仅仅具有虚拟3d演示功能,缺少设备中各部件之间的交互性,不能很好的应用在大型设备的教学应用中,或者说是不能直观的体现大型设备各部件之间的关系。
技术实现思路
1、针对上述问题,本发明的主要目的在于设计一种基于元宇宙的实验仿真方法,解决在大型实验的仿真系统中实验设备与使用者的交互问题。
2、为了实现上述目的本发明采用如下技术方案:
3、一种基于元宇宙的实验仿真方法,该方法基于仿真系统进行实现,所述的仿真系统为结合了虚拟现实技术,以建模工具结合模型渲染工具,最终以引擎工具进行制作具有交互性的虚拟实验环境;
4、具体实现步骤如下:
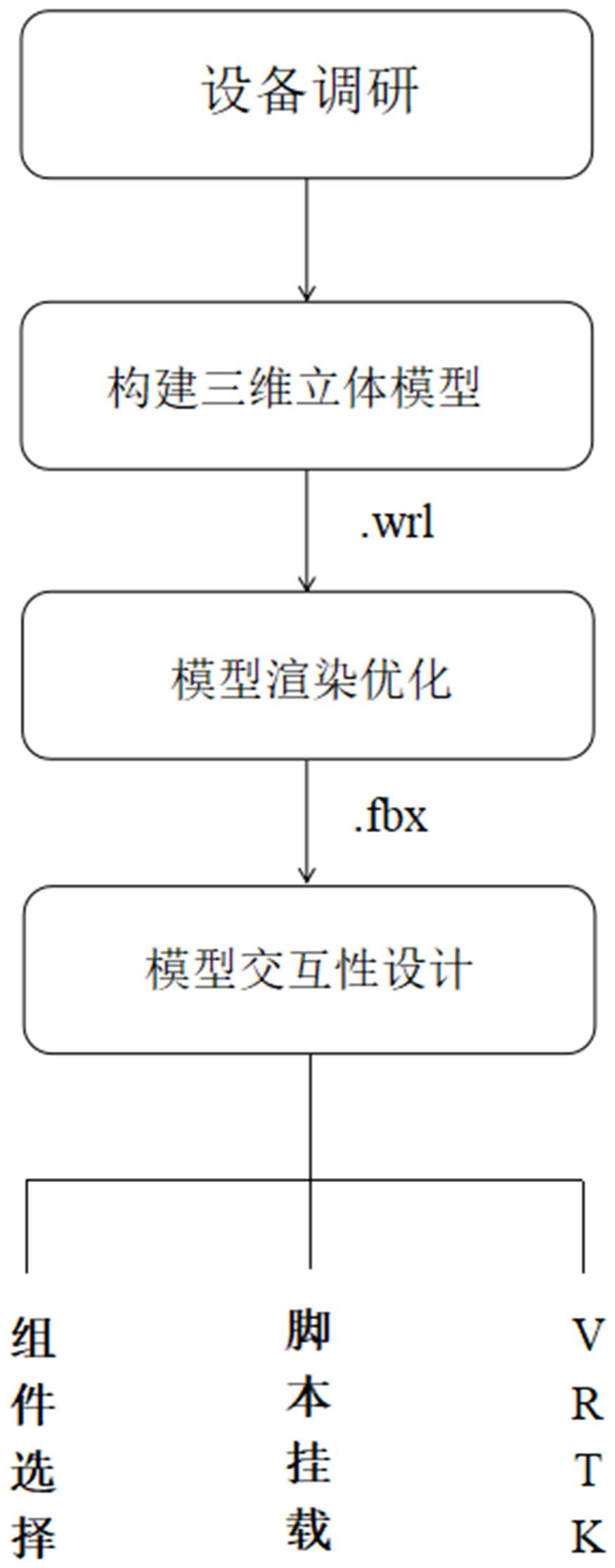
5、步骤1:三维模型构建,基于实验设备的基本信息,采用建模工具针对实验设备的各部件三维模型进行建模,以及实验设备各部件三维模型的组装;
6、步骤2:模型渲染及优化,将实验设备以装配体形式的三维模型导入模型渲染工具中,并使用孤立命令针对三维模型中的各部件进行孤立,针对孤立后各部件的三维模型进行优化,得到优化后的三维模型;
7、步骤3:赋予交互性,优化后的三维模型导入引擎工具,并结合三维模型中各部件模型的特点选择碰撞器;
8、在引擎工具中导入vrtk插件,并调整三维模型的碰撞器参数,选择合适的抓取机制进行实验设备各部件三维模型的抓取;
9、步骤4:模型运动效果判定,基于步骤3抓取的三维模型,并通过导入引擎工具的手持设备,判断实验设备各部件三维模型的抓取行程轨迹与预设是否吻合。
10、作为本发明的进一步描述,在所述的仿真系统中,所述的建模工具设置为solidworks,所述的模型渲染工具设置为3ds max,所述的引擎工具设置为unity 3d。
11、作为本发明的进一步描述,步骤1中,基于实验设备的型号、大小、尺寸进行评判并确定实验设备的选型,然后通过solidworks软件将实验设备各部件的三维模型进行建模,以及实验设备各部件三维模型的组装。
12、作为本发明的进一步描述,步骤1中,三维建模过程中包含大量的曲面时,使用迭代收缩算法减少模型的曲面数:
13、 (1)
14、其中, 代表网格中的顶点集合,为三维模型各部件的顶点,为向量维度;
15、设为顶点v = [, , , 1]的误差,为顶点的相关联平面集合,则有:
16、 = (2)
17、其中,为当前顶点的相关联平面集合,为的转置,为顶点v的转置,为平面的基本误差二次型,表示为:
18、 = (3)
19、 设为顶点的二次误差测度矩阵,则有:
20、 = (4)
21、设折叠后边(, )成为, 则折叠后的误差为 :
22、 = (5)
23、其中,为折叠后的边向量的转置,,分别为顶点i,j的二次误差测度矩阵。
24、作为本发明的进一步描述,步骤2中,通过3ds max软件中的材质编辑器,对所导入的三维模型各部件设定材质参数,所述的材质参数为外观上的物理特性,包括质地、材料、光泽度。
25、作为本发明的进一步描述,步骤3中,三维模型中各部件的碰撞器包括一个或多个。
26、作为本发明的进一步描述,步骤3中,所述的抓取机制包括vrtk_child ofcontroller grab attach组件、vrtk_climbable grab attach组件、vrtk_fixed jointgrab attach组件、vrtk_rotator track grab attach组件。
27、作为本发明的进一步描述,步骤4中,模型运动效果的判定为,基于导入unity 3d自身所带的虚拟手持设备进行判断。
28、作为本发明的进一步描述,所述的实验设备类型包括固定形态模型和动态流动的模型类型。
29、作为本发明的进一步描述,在针对动态流动的模型类型进行仿真的过程中,运用离子系统有效地模拟实验中流体动态流动的过程,具体为:
30、 (6)
31、其中,代表单子粒子属性,为向量维度,为单个属性,为离子所有属性集合维度;
32、设粒子在时间时刻的状态为 ,则从至的映射可表示为:
33、 (7)
34、其中,为t时刻单个粒子映射的状态,为时间维度集合;
35、粒子系统即为多个粒子在多时间段映射的集合,可表示为:
36、 (8)
37、将粒子的初始状态定为。
38、相对于现有技术,本发明的技术效果为:
39、本发明提供了一种基于元宇宙的实验仿真方法,该方法基于仿真系统进行实现,仿真系统为结合了虚拟现实技术,以solidworks 作为建模工具,通过3ds max作为模型渲染工具,最后以unity 3d 为制作引擎,综合了建模、渲染、赋予交互性的步骤,设计了具有交互性的传统工科虚拟实验环境,在具有较大型传统工科实验设备的基础上,能够较好地赋予实验设备与使用者的交互性,根据元宇宙与虚拟现实的理念,应用在虚拟实验教学中,高效地帮助教师更好地达到教学任务。
40、本发明的方法在实现过程中,通过unity 3d 引擎中的vrtk插件实现人机交互,在大型实验设备中,vrtk 插件能够针对模型的不同部件采取合适的抓取机制,提升用户的交互性,vr技术模拟现实世界的真实性和自然的人机交互性能够在很大程度上提高高校的教学与研究质量,使虚拟环境下的使用者能够有较好的沉浸式体验,使得传统实验课程教学的过程中,可见性更高,提高传统实验课程的便利性与教学效果。