一种实现波束扫描的可重构阵列天线
本发明属于方向图可重构天线设计,特别是指一种实现波束扫描的可重构阵列天线。
背景技术:
1、可重构天线在不改变天线基本结构的前提下通过改变阵列中各阵元的激励幅度和相位实现改变方向图辐射特性的目的,即利用一个天线综合得出多个特殊形状的波束以实现不同的特殊功能,因此可重构天线设计可以极大的减少天线数量达到减少系统的体积、重量、制造成本,最终使雷达具有更好的电磁兼容性。作为一种新的天线技术,可重构天线因在信息与通信领域中具有良好的应用前景和实际价值,近年来引起研究学者的广泛关注(如[1]辜杨.波束扫描稀疏阵列天线综合方法的研究[d].导师:郝张成;陈忆元.东南大学,2020.[2]lei,shiwen,et al.″admm-based array antenna synthesis algorithmwith reconfigurable pattern element selection.″signal processing 5(2021):108099.)。阵列天线方向图综合设计是一个非常复杂的电磁问题,其目标函数是非线性、多参数且不可微的,传统的梯度寻优数值方法和解析方法均无法有效求解。群智能算法因具备全局寻优能力强、理论概念简单、不需要梯度信息、灵活实现和易于与其他智能算法融合的优点,因此在求解较为复杂的高维度多峰函数优化问题时具有明显的优势,目前以广泛应用于阵列天线综合等电磁优化问题中。经多个群智能算法标准测试函数进行验证,灰狼算法对比引力搜索算法、差分进化和粒子群优化算法在求解精度和稳定性上具有明显优势,但灰狼算法也存在着收敛速度慢、全局搜索能力弱和陷入局部最优的缺点。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种实现波束扫描的可重构阵列天线,通过利用改进灰狼算法对设立的远场方向图的适应度函数进行优化求解,以得到可重构阵列天线的远场方向图的优化结果,基于仿真结果证明,不仅降低了系统制造成本,在系统的维护性和稳定性上也具有明显优势,且综合所得的扫描波束具有更优的辐射特性。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、本发明提供了一种实现波束扫描的可重构阵列天线,所述可重构阵列天线的远场方向图由基于改进灰狼算法的阵列综合方法优化所得,其中,所述阵列综合方法包括:
4、结合综合后最大副瓣电平、预设主瓣宽度及综合后主瓣宽度设立远场方向图的适应度函数;
5、利用改进灰狼算法对设立的远场方向图的适应度函数进行优化求解,得到可重构阵列天线的远场方向图的优化结果。
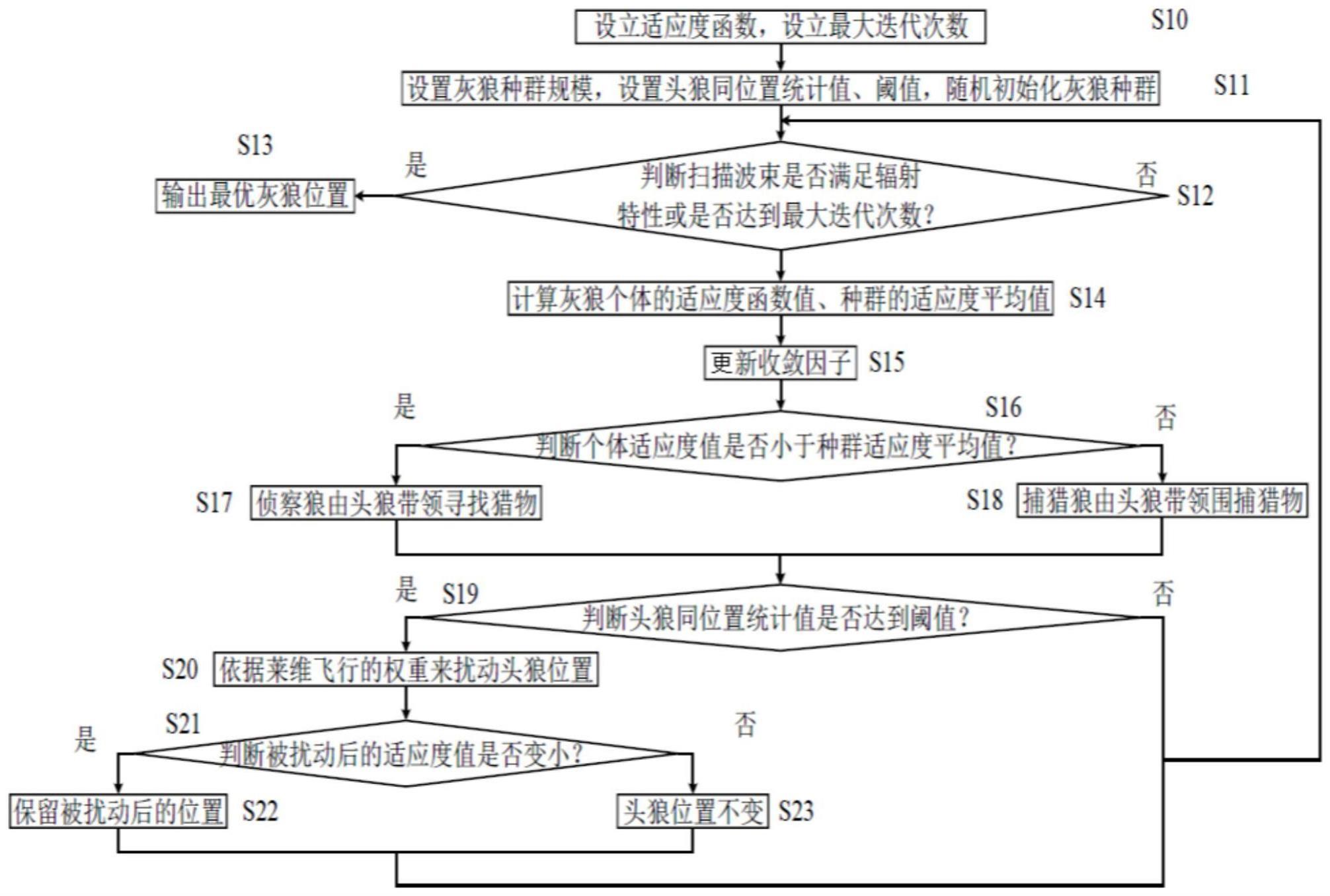
6、进一步的,所述利用改进灰狼算法对构建的远场方向图的适应度函数进行优化求解,包括:
7、随机初始化灰狼种群;
8、判断是否存在灰狼位置对应的扫描波束满足给定的辐射特性要求或算法是否达到最大迭代次数,若符合其中任意一个条件,输出最优灰狼个体位置,否则执行循环迭代步骤直至满足前述中任意一个条件;
9、所述循环迭代步骤包括:
10、计算灰狼个体的适应度函数值、种群的适应度平均值,确定三头精英狼,更新头狼同位置统计值;
11、更新收敛因子;
12、对比灰狼个体适应度值与种群适应度平均值,依据对比结果更新灰狼个体位置;
13、判断头狼连续出现在当前位置的次数是否达到阈值,若是,则依据莱维飞行的权重来扰动头狼位置并判断是否保留扰动后的位置。
14、进一步的,阵列模型的远场方向图表示为:
15、
16、(1)式中,设置阵列单元为理想点源,单元间距均为δ1,k=2π/λ,λ为自由空间波长,u=sinθ(∈[-1,1]),zd表示天线中第d个阵元的激励幅度,其中d∈[1,...d];
17、所述设立的适应度函数为:
18、fit=k1psl+k2|bw-bwd| (2)
19、(2)式中,k1、k2为权重系数,psl为综合后得到的最大副瓣电平,bwd为预设的主瓣宽度,bw为综合后得到的主瓣宽度;
20、灰狼位置对应的适应度函数值具体如下式:
21、fit=fit1+fit2+…+fith (3)
22、(3)式中,h为扫描波束的个数;
23、种群的适应度平均值具体如下式:
24、
25、依据式(4),输出的灰狼个体位置需满足对应的fit值最小。
26、进一步的,设置种群规模大小为m,t为当前迭代次数,t为最大迭代次数,第m(m∈[1,...,m])个灰狼位置zm由d个元素组成,表示为:
27、[zm、1,...,zm、d,…,zm、d],头狼同位置统计值为j,且j=0、阈值j为10。
28、进一步的,所述判断是否存在灰狼位置对应的扫描波束满足给定的辐射特性要求及算法是否达到最大迭代次数,包括:
29、判断是否存在zm,依据式(1),其对应的扫描波束最大副瓣电平均小于预设阈值psld且主瓣宽度均小于bwd,判断t是否达到最大迭代次数t。
30、进一步的,所述确定三头精英狼、更新头狼同位置统计值,包括:
31、对所有灰狼个体按适应度值从小到大排序,三头精英狼α狼、β狼和δ狼的位置(xα、xβ和xδ)分别由群体最优解、次优解和第三最优解来定义,若α狼的位置与上一代位置相同,则对统计值j做j=j+1处理,否则j=0。
32、进一步的,所述更新收敛因子,包括:
33、非线性递减收敛因子a1的更新公式如下:
34、
35、(5)式中,k3表示收敛因子a1的曲线光滑因子;
36、非线性递减收敛因子a2更新公式如下:
37、
38、(6)式中,k4表示收敛因子a2的曲线光滑因子。
39、进一步的,所述的更新灰狼个体位置,包括:
40、若m狼的适应度函数值小于等于fitave,则其位置更新步骤为:
41、x1=xα-a1*|c1*xα-xm(t)| (7)
42、x2=xβ-a2*|c2*xβ-xm(t)| (8)
43、x3=xδ-a3*|c3*xδ-xm(t)| (9)
44、xm(t)表示第t次迭代过程中m狼的位置;x1、x2和x3表示在α狼、β狼和δ狼各自位置向量(xα、xβ和xδ)的引导下m狼的位置更新向量;参数a1、a2和a3为调节灰狼个体移动方向参数,由式(10)确定,c1、c2和c3为猎物位置修正参数,由式(11)确定;
45、a=2*a*r1-a (10)
46、(10)式中,r1为[0,1]区间的随机数,a由式(5)确定;
47、c=2*r2 (11)
48、(11)式中,r2为[0,1]区间的随机数;
49、m狼更新后的位置xm(t+1)由(12)式确定;
50、
51、若m狼的适应度函数值大于fitave,则其位置依据式(7)-(12)进行更新,其中式(12)中a由式(6)确定。
52、进一步的,所述依据莱维飞行的权重来扰动头狼位置,包括:
53、判断j是否达到最大阈值j,若是,则依据莱维飞行的权重来扰动头狼位置,等价于依据式(13)对α狼的位置进行更新;
54、
55、式中,表示点乘,r3、r4为[0,1]区间的随机数,s为服从式(14)的levy飞行分布的随机步长,sr由式(15)表示;
56、
57、
58、(14)式中,β为常数,u和v表示正态分布的随机数,u~n(0,σ2),v~n(0,1),方差σ如式(16)所示:
59、
60、式中:γ表示伽马函数。
61、进一步的,所述判断是否保留扰动后的位置,包括:
62、依据式(3),计算扰动前、后头狼个体的适应度函数值,若扰动后的适应度函数值小于扰动前适应度值,则保留扰动后的位置,否则保持原位置不变,即头狼的位置更新公式等价如下:
63、
64、与现有技术相比,本发明所达到的有益效果:
65、该实现波束扫描的可重构阵列天线,通过利用改进灰狼算法对设立的远场方向图的适应度函数进行优化求解,以得到可重构阵列天线的远场方向图的优化结果,基于仿真结果证明,不仅降低了系统制造成本,在系统的维护性和稳定性上也具有明显优势,且综合所得的扫描波束具有更优的辐射特性;
66、该实现波束扫描的可重构阵列天线,基于改进的灰狼算法,首先依据平均适应度值将狼群分为侦察狼和捕猎狼,侦察狼在头狼带领下依据非线性递减收敛因子寻找猎物以平衡算法的全局勘探和局部开发性能,捕猎狼在头狼带领下依据非线性递减收敛因子攻击猎物以提升算法对特定区域进行精细化搜索的能力,其次,引入跳出机制,借助莱维飞行的权重来更新头狼个体位置,提高个体的局部抗停滞能力,最终提高算法的寻优精度。
- 还没有人留言评论。精彩留言会获得点赞!