基于小型无人机载干涉SAR的复杂地形区域高程反演方法
本发明涉及图像处理的,具体涉及一种基于小型无人机载干涉sar的复杂地形区域高程反演方法。
背景技术:
1、在利用基于小型无人机载干涉sar实现地物高程反演时,根据干涉sar地形高程反演公式,基线越长,反演精度越高。然而,长基线将引起小型无人机载sar图像对间的失相干等问题,导致干涉测量失效。同时,现有的干涉测量技术主要为单基线,相位解缠绕时,干涉相位缠绕到-π到π,需要对其进行相位解缠绕处理。
2、现有单基线干涉sar相位解缠绕方法,大多以itoh为约束条件,假定相邻像素间的绝对相位差小于π,即测量区域的地形表面没有陡坡或强不连续。但是,对于复杂山地区域,地形表面具有较多的强不连续陡坡,采用小型无人机载干涉sar技术反演其高程时,干涉相位中相邻像素间的相位差将高于π,出现干涉相位模糊现象,导致相位解缠绕结果错误。
3、因此,如何克服因地表强不连续性或陡坡导致的干涉相位连续性假设失效,并解决小型无人机载干涉sar多基线相位解缠绕精度不足,是当前面临的问题。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种基于小型无人机载干涉sar的复杂地形区域高程反演方法,以解决现有技术中如何克服因地表强不连续性或陡坡导致的干涉相位连续性假设失效,并解决小型无人机载干涉sar多基线相位解缠绕精度不足的技术问题。
2、本发明提供了一种基于小型无人机载干涉sar的复杂地形区域高程反演方法,包括:
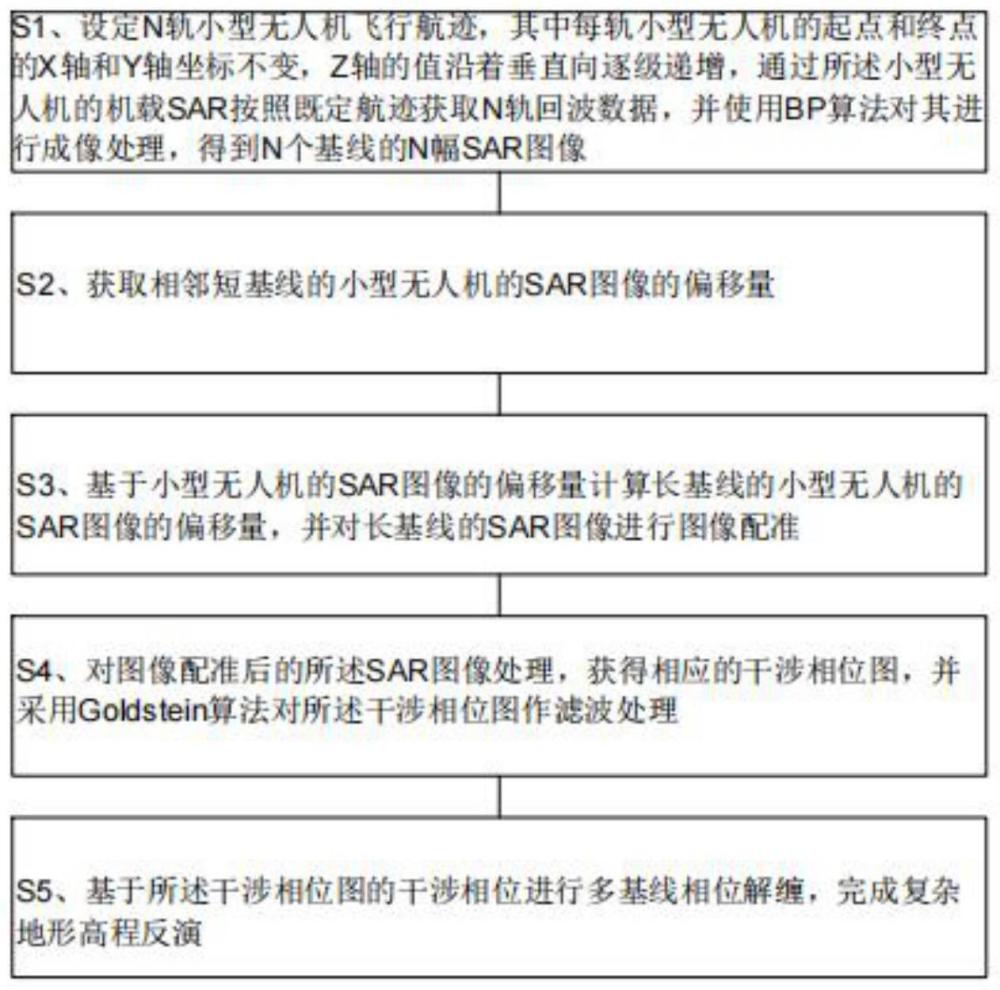
3、s1、设定n轨小型无人机飞行航迹,其中每轨小型无人机的起点和终点的x轴和y轴坐标不变,z轴的值沿着垂直向逐级递增,通过所述小型无人机的机载sar按照既定航迹获取n轨回波数据,并使用bp算法对其进行成像处理,得到n个基线的n幅sar图像;
4、s2、获取相邻短基线的小型无人机的sar图像的偏移量;
5、s3、基于小型无人机的sar图像的偏移量计算长基线的小型无人机的sar图像的偏移量,并对长基线的sar图像进行图像配准;
6、s4、对图像配准后的所述sar图像处理,获得相应的干涉相位图,并采用goldstein算法对所述干涉相位图作滤波处理;
7、s5、基于所述干涉相位图的干涉相位进行多基线相位解缠,完成复杂地形高程反演。
8、可选地,所述得到n个基线的n幅sar图像,包括:
9、所述sar图像表示为si,i=1,2,3…n。
10、可选地,所述获取相邻短基线的小型无人机的sar图像的偏移量,包括:
11、以相邻短基线的小型无人机获取的sar图像si作为第一主图形,sn-i作为第一副图像,将第一主图像si的高信噪比的像素点作为控制点,以所述控制点坐标为中心分别进行整数偏移量估计和小数偏移量估计,并求得所述整数偏移量和小数偏移量的和作为所述控制点的偏移量,所述控制点的偏移量表示为
12、其中,所述整数偏移量以第一主图像si的控制点坐标为中心,匹配窗尺寸5*5,第一副图像sn-i中对应坐标为中心,搜索窗尺寸12*12,利用复相关法,完成整数偏移量估计;
13、所述小数偏移量以第一主图像si的控制点坐标为中心,匹配窗尺寸7*7,第一副图像sn-i中对应坐标为中心,搜索窗尺寸15*15,并进行16倍升采样处理,利用复相关法,完成小数偏移量估计。
14、可选地,所述基于小型无人机的sar图像的偏移量计算长基线的小型无人机的sar图像的偏移量,包括:
15、以长基线的小型无人机获取的sar图像si中s1作为第二主图像,sn,n≥3作为第二副图像,对所述第二副图像按照所述第二主图像的控制点坐标进行重采样处理,并将相邻短基线控制点的偏移量迭代累加对应获取第二主图像s1和第二副图像sn的偏移量,表示为:
16、
17、可选地,所述并对长基线的sar图像进行图像配准,包括:
18、以第二主图像s1的控制点坐标及对应点坐标在第二副图像sn的偏移量,采用最小二乘法完成第二副图像sn的偏移量拟合,并利用双线性插值法完成第二副图像sn的重采样处理。
19、可选地,所述对图像配准后的所述sar图像处理,获得相应的干涉相位图,并采用goldstein算法对所述干涉相位图作滤波处理,包括:
20、将第二主图像s1和第二副图像sn共轭相乘,获得相应的干涉相位图,且使用goldstein算法对干涉相位图作滤波处理,并使用小型无人机的航迹信息完成干涉相位的去平地相位处理,则监测区域目标点在不同基线下对应的干涉相位表达式为:
21、
22、其中,φn表示s1和sn的干涉相位,表示对应的垂直基线长度,h表示目标点p的地表高程,λ表示波长,r表示场景中心到航迹的天线相位中心的最短斜距,θ表示最短斜距时场景中心到航迹的天线入射角。
23、可选地,所述基于所述干涉相位图的干涉相位进行多基线相位解缠,完成复杂地形高程反演,包括:
24、对公式2变形,将基线为时的目标高程可表示为:
25、
26、基于目标的高程h不受基线影响的前提,在多基线情况下将公式3等量表示为:
27、
28、将公式4变形表示为:
29、
30、根据缠绕相位φn的绝对相位可表示为则公式5可重新表示为:
31、
32、其中,表示在不同基线长度下的缠绕相位,kn表示同一像素在每一幅缠绕相位图中的模糊数,若n-1幅干涉图中的任意两幅基线的长度比值满足:
33、
34、其中,γi(i=1,2,…,n-1)为两两互质的正整数,并根据中国余数定理,基线解表示为:
35、
36、其中,c0为不为零的任意有理数;
37、联合公式6-8,可表示为:
38、
39、对公式9变形,表示为:
40、
41、令
42、
43、其中,·为取整运算;
44、将公式11代入公式10,则公式10可表示为:
45、2π(ξ1+ζ1+γ1k1)=2π(ξ2+ζ2+γ2k2)=…=2π(ξn-1+ζn-1+γn-1kn-1) (12)
46、将公式12中各项对2π求余,则公式12的同余方程组可表示为:
47、
48、根据中国余数定理求出x的值,若假定求解值为p,则每一幅缠绕相位图中同一像素的模糊数表示为:
49、
50、因此,多基线干涉相位图中同一像素的绝对相位可表示为:
51、
52、将公式15代入公式3,即可获得区域内任意目标点p的高程hp,可表示为:
53、
54、相比于现有技术,本发明具有如下有益效果:
55、通过将相邻短基线小型无人机的机载sar图像进行偏移量循环累加的长基线sar图像配准方,并通过干涉相位图的干涉相位进行多基线相位解缠,克服因地表强不连续性或陡坡导致的干涉相位连续性假设失效的问题,确保后续insar生成数字高程模型的精确性。
- 还没有人留言评论。精彩留言会获得点赞!