ORB特征匹配算法的优化方法、装置及计算机设备与流程
本技术属于计算机视觉,更具体地,涉及一种orb特征匹配算法的优化方法、装置、计算机设备及计算机可读存储介质。
背景技术:
1、近几十年来,移动机器人技术正向着自主建图、自主导航的智能化方向发展,不仅对许多工业生产和服务业兴起做出了巨大贡献,也在工业、医学、农业、建筑业甚至军事等领域中均有重要用途,是21世纪最具潜力的应用领域之一。因此,移动机器人自主导航技术的研究具有重要的意义。
2、移动机器人的核心技术为视觉slam图像匹配算法,在应用的工程中,移动机器人首先通过自带相机获取外界环境图像,其配置的视觉slam图像匹配算法对获取到的外部环境图像进行视觉同步定位与建图,进而构建环境地图。但申请人认识到,在视觉同步定位与建图过程中需要将多个外部环境图像进行特征点匹配,由于每个外部环境图像中特征点的差异,使用视觉slam图像匹配算法会造成较大的图像特征点的误匹配率,降低视觉slam图像匹配算法的定位精度。
技术实现思路
1、有鉴于此,本发明提供了一种orb特征匹配算法的优化方法、装置、计算机设备及计算机可读存储介质,主要目的在于解决目前存在使用视觉slam图像匹配算法会造成较大的图像特征点的误匹配率,降低视觉slam图像匹配算法的定位精度的问题。
2、依据本技术第一方面,提供了一种orb特征匹配算法的优化方法,包括:
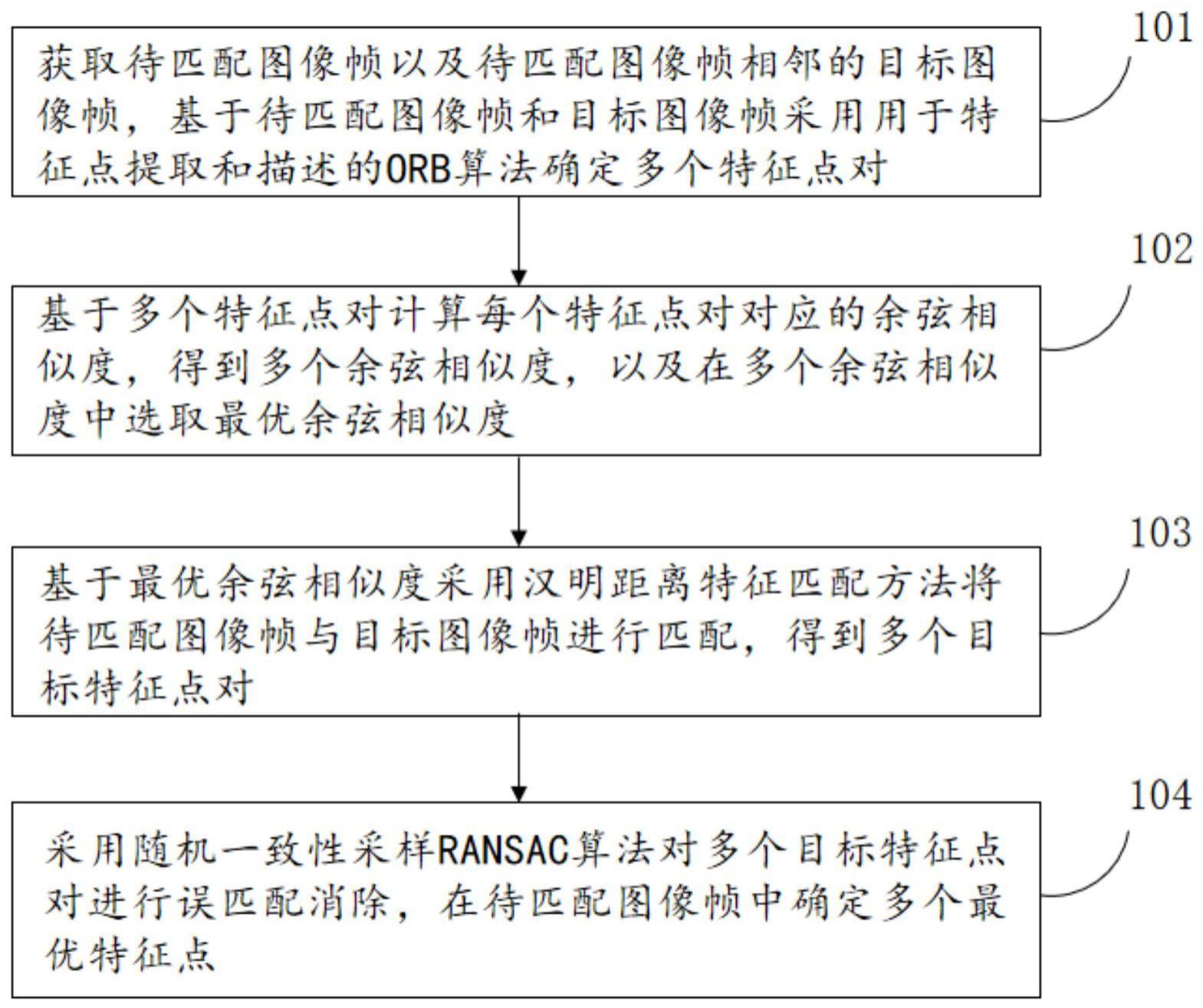
3、获取待匹配图像帧以及所述待匹配图像帧相邻的目标图像帧,基于所述待匹配图像帧和所述目标图像帧采用用于特征点提取和描述的orb算法确定多个特征点对;
4、基于所述多个特征点对计算每个特征点对对应的余弦相似度,得到多个余弦相似度,以及在所述多个余弦相似度中选取最优余弦相似度;
5、基于所述最优余弦相似度采用汉明距离特征匹配方法将所述待匹配图像帧与所述目标图像帧进行匹配,得到多个目标特征点对;
6、采用随机一致性采样ransac算法对所述多个目标特征点对进行误匹配消除,在所述待匹配图像帧中确定多个最优特征点。
7、可选地,所述基于所述待匹配图像帧和所述目标图像帧采用用于特征点提取和描述的orb算法确定多个特征点对包括:
8、利用所述orb算法包括的fast算法从所述待匹配图像帧中提取多个第一fast角点,以及利用所述fast算法从所述目标图像帧中提取多个第二fast角点,其中,所述多个第一fast角点的数量与所述多个第二fast角点的数量相同;
9、利用所述orb算法包括的brief算法计算所述多个第一fast角点中每个第一fast角点对应的第一brief描述子,以及利用所述brief算法计算所述多个第二fast角点中每个第二fast角点对应的第二brief描述子;
10、基于多个第一brief描述子确定多个第一orb特征点,以及基于多个第二brief描述子确定多个第二orb特征点;
11、采用汉明距离特征匹配方法将所述多个第一orb特征点与所述多个第二orb特征点进行匹配,得到所述多个特征点对。
12、可选地,所述利用所述orb算法包括的fast算法从所述待匹配图像帧中提取多个第一fast角点,以及利用所述fast算法从所述目标图像帧中提取多个第二fast角点,包括:
13、将所述待匹配图像帧划分为多个第一图像块,所述多个第一图像块中每个图像块包括多个第一像素点;
14、设置所述多个第一像素点中每个第一像素点的亮度为第一目标亮度,以及确定第一目标阈值,计算所述第一目标阈值与所述第一目标亮度之间的和值,得到第一最高亮度,计算所述第一目标亮度与所述第一目标阈值之间的差值,得到第一最低亮度;
15、对于每个第一像素点执行以下操作:以第一像素点为中心,选取以第一预设值为半径的圆周上的多个第一目标像素点,确定所述多个第一目标像素点中每个第一目标像素点的第一当前亮度,若确定在所述圆周上有连续的预设数量的第一目标像素点的第一当前亮度大于第一最高亮度或小于第一最低亮度时,确定所述第一像素点为第一特征点;
16、获得所述多个第一图像块对应的多个第一特征点,采用非极大值抑制方法对所述多个第一特征点进行平衡,在所述多个第一特征点中确定多个第一目标特征点,将所述多个第一目标特征点作为所述多个第一fast角点;以及,
17、将所述目标图像帧划分为多个第二图像块,所述多个第二图像块中每个第二图像块包括多个第二像素点;
18、设置所述多个第二像素点中每个第二像素点的亮度为第二目标亮度,以及确定第二目标阈值,计算所述第二目标阈值与所述第二目标亮度之间的和值,得到第二最高亮度,计算所述第二目标亮度与所述第二目标阈值之间的差值,得到第二最低亮度;
19、对于每个第二像素点执行以下操作:以第二像素点为中心,选取以第二预设值为半径的圆周上的多个第二目标像素点,确定所述多个第二目标像素点中每个第二目标像素点的第二当前亮度,若确定在所述圆周上有连续的预设数量的第二目标像素点的第二当前亮度大于第二最高亮度或小于第二最低亮度时,确定所述第二像素点为第二特征点;
20、获得所述多个第二图像块对应的多个第二特征点,采用所述非极大值抑制方法对所述多个第二特征点进行平衡,在所述多个第二特征点中确定多个第二目标特征点,将所述多个第二目标特征点作为所述多个第二fast角点。
21、可选地,所述基于多个第一brief描述子确定多个第一orb特征点,以及基于多个第二brief描述子确定多个第二orb特征点,包括:
22、对所述多个第一图像块中每个第一图像块执行以下操作:确定第一图像块的质心和几何中心,以几何中心为原点,连接所述几何中心与所述质心,得到一从所述几何中心指向所述质心的方向向量,确定第一图像块包括的至少一个第一brief描述子对应的至少一个坐标,以所述方向向量为基准,根据所述质心和每个第一brief描述子对应的坐标确定每个第一brief描述子对应的方向,构建图像金字塔,基于所述图像金字塔和每个第一brief描述子对应的方向组成每个第一brief描述子对应的第一orb特征点;
23、基于每个第一图像块中每个第一brief描述子对应的第一orb特征点得到所述多个第一orb特征点;以及,
24、对所述多个第二图像块中每个第二图像块执行以下操作:确定第二图像块的质心和几何中心,以几何中心为原点,连接所述几何中心与所述质心,得到一从所述几何中心指向所述质心的方向向量,确定第二图像块包括的至少一个第二brief描述子对应的至少一个坐标,以所述方向向量为基准,根据所述质心和每个第二brief描述子对应的坐标确定每个第二brief描述子对应的方向,构建图像金字塔,基于所述图像金字塔和每个第二brief描述子对应的方向组成每个第二brief描述子对应的第二orb特征点;
25、基于每个第二图像块中每个第二brief描述子对应的第二orb特征点得到所述多个第二orb特征点。
26、可选地,所述采用汉明距离特征匹配方法将所述多个第一orb特征点与所述多个第二orb特征点进行匹配,得到所述多个特征点对,包括:
27、对所述待匹配图像帧包括的所述多个第一orb特征点中每个第一orb特征点执行以下操作:计算第一orb特征点与所述目标图像帧包括的所述多个第二orb特征点中每个第二orb特征点的汉明距离,在多个汉明距离中确定汉明距离小于汉明距离阈值的至少一个目标汉明距离,在所述多个第二orb特征点中确定所述至少一个目标汉明距离对应的至少一个第二目标orb特征点,计算所述至少一个第二目标orb特征点中每个第二目标orb特征点与所述第一orb特征点之间的余弦相似度,得到多个余弦相似度,在所述多个余弦相似度中确定最优余弦相似度,基于所述最优余弦相似度和每个第二目标orb特征点对应的余弦相似度确定每个第二目标orb特征点对应的相似度匹配值,得到至少一个相似度匹配值,在所述至少一个相似度匹配值中查询最大相似度匹配值,将所述最大相似度匹配值对应的第二目标orb特征点与所述第一orb特征点组合成一特征点对;
28、基于每个第一orb特征点对应的一特征点对得到所述多个特征点对。
29、可选地,所述基于所述多个特征点对计算每个特征点对对应的余弦相似度,得到多个余弦相似度,以及在所述多个余弦相似度中选取最优余弦相似度,包括:
30、对所述多个特征点对中每个特征点对执行以下操作:确定特征点对包括的两个特征点的方向,基于两个特征点的方向计算所述特征点对对应的余弦相似度;
31、基于每个特征点对对应的余弦相似度得到多个余弦相似度,计算所述多个余弦相似度中每个两个余弦相似度之间的差值,得到多个第一差值,计算所述多个第一差值中每两个第一差值之间的差值,得到多个第二差值,在所述多个第二差值中查询出现频率最高的差值作为一组第二目标差值,确定所述一组第二目标差值对应的余弦相似度为所述最优余弦相似度。
32、可选地,所述采用随机一致性采样ransac算法对所述多个目标特征点对进行误匹配消除,在所述待匹配图像帧中确定多个最优特征点,包括:
33、在所述多个目标特征点对中随机选取四个目标特征点对,采用四点法对所述四个目标特征点对进行计算,得到初始化单应性矩阵;
34、在所述多个目标特征点对中多次随机选取四个更新目标特征点对,采用所述四点法对每次选取的四个更新目标特征点对进行计算,得到多个更新单应性矩阵,计算所述多个更新单应性矩阵中每个更新单应性矩阵与所述初始化单应性矩阵之间的误差,得到多个误差,在所述多个误差中确定误差小于误差阈值的至少一个目标误差,在所述多个目标特征点对中确定所述至少一个目标误差对应的多个目标orb特征点对,在所述待匹配图像帧中确定所述多个目标orb特征点对对应的多个内点,统计所述多个内点的数量,直至所述多个内点的数量满足预设条件;
35、将所述多个内点作为所述多个最优特征点。
36、依据本技术第二方面,提供了一种orb特征匹配算法的优化装置,包括:
37、确定模块,用于获取待匹配图像帧以及所述待匹配图像帧相邻的目标图像帧,基于所述待匹配图像帧和所述目标图像帧采用用于特征点提取和描述的orb算法确定多个特征点对;
38、选取模块,用于基于所述多个特征点对计算每个特征点对对应的余弦相似度,得到多个余弦相似度,以及在所述多个余弦相似度中选取最优余弦相似度;
39、匹配模块,用于基于所述最优余弦相似度采用汉明距离特征匹配方法将所述待匹配图像帧与所述目标图像帧进行匹配,得到多个目标特征点对;
40、消除模块,用于采用随机一致性采样ransac算法对所述多个目标特征点对进行误匹配消除,在所述待匹配图像帧中确定多个最优特征点。
41、依据本技术第三方面,提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面中任一项所述方法的步骤。
42、依据本技术第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中任一项所述的方法的步骤。
43、借由上述技术方案,本技术提供了一种orb特征匹配算法的优化方法、装置、计算机设备及计算机可读存储介质,本技术首先根据获取的待匹配图像帧和目标图像帧采用用于特征点提取和描述的orb算法确定多个特征点对,随后基于多个特征点对计算每个特征点对对应的余弦相似度,得到多个余弦相似度,以及在多个余弦相似度中选取最优余弦相似度,接着基于最优余弦相似度采用汉明距离特征匹配方法将待匹配图像帧与目标图像帧进行匹配,得到多个目标特征点对,最后采用随机一致性采样ransac算法对多个目标特征点对进行误匹配消除,在待匹配图像帧中确定多个最优特征点;通过orb算法确定多个特征点对,计算每个特征点对对应的余弦相似度,在这些余弦相似度中选取最优余弦相似度,基于这个最优余弦相似度利用汉明距离特征匹配方法可以对待匹配图像帧与目标图像帧进行精确匹配,即利用余弦相似度剔除了不合规的特征点,精确匹配之后再采用ransac算法进一步消除多个目标特征点中的不合规的特征点,确定了最优特征点,上述过程有效减少误匹配率,进而提高了视觉slam图像匹配算法的定位精度。
44、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!