一种基于蚁群优化算法的多AGV动态路径规划方法
本发明属于多agv动态路径规划方法领域,尤其涉及一种基于蚁群优化算法的多agv动态路径规划方法。
背景技术:
1、近年来,随着信息技术与工业技术的长足发展,推动了包括制造业在内的各行业的加速转型。智能化、自动化包装制造已经成为实现智能生产的必要条件。而在打造智能仓储的过程中,智能装置的运输功能以及配套的智能调度算法的开发,业已成为全球相关科研团队和大型制造业公司的研究投资热点。作为智能运输设备的自动导引运输车agv可谓是连接智能生产、智能工厂、智能物流的重要纽带。
2、传统的工厂系统中,货物和零件的运输调度主要依赖固定的调度生产线或者人工搬运,这在货物和零件的运输调度任务较小时勉强能够应付。随着制造业的高速发展和加工制造技术的升级改造,海量的货物调度需求在固定的仓储或者工厂里的调度问题难点逐渐凸显出来,传统的人力操作、传送带运输的工厂物流方式已经难以满足需求。尽管近些年来随着agv硬件的发展,这些难点有所缓解,然而面对大型复杂仓储中的调度问题,现有的agv串行搬运的方案在处理这些问题时仍表现乏力,主要体现在:
3、1.当前任务分配方法缺乏对潜在冲突情况的评估,导致多个agv之间的任务执行数量不均衡。一些agv小车高频次的响应下发的任务,而另一些小车则长时间地处于空闲状态。
4、2.现有的参与调度的agv数量通常较少,agv的协作能力和故障容错能力较差,无法处理多agv调度过程中产生的冲突或死锁问题,自动化程度差。
5、3.现有的agv调度方法在由多agv组成的动态调度系统时缺乏智能预测推理能力,生成的agv调度方案缺乏高效性和灵活性。
6、现有技术中,公开号cn105938572a的中国专利公开了一种物流存储系统预防干涉的多自动导引车路径规划方法,结合干涉度阈值,设计诱导蚁群粒子群融合方法进行路径规划,主要是通过蚁群算法等规划路径,没有公开解决调度过程产生冲突或死锁等问题,也没有实现智能预测功能。
7、因此,在“智能制造”的驱动下,亟需提供一种基于蚁群优化算法的多agv动态路径规划方法,通过智能、高效的任务分配和调度方案来实现多个agv小车的实时路径规划和动态避障技术,从而为智能仓储提供技术支撑。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种基于蚁群优化算法的多agv动态路径规划方法,按照并行的双线程设计了agv的任务派遣和潜在的冲突消解技术,同时对于某些死锁情形进行消解,实现了多agv调度系统的自动化,智能化和高效化。
2、本发明的技术方案是这样实现的:
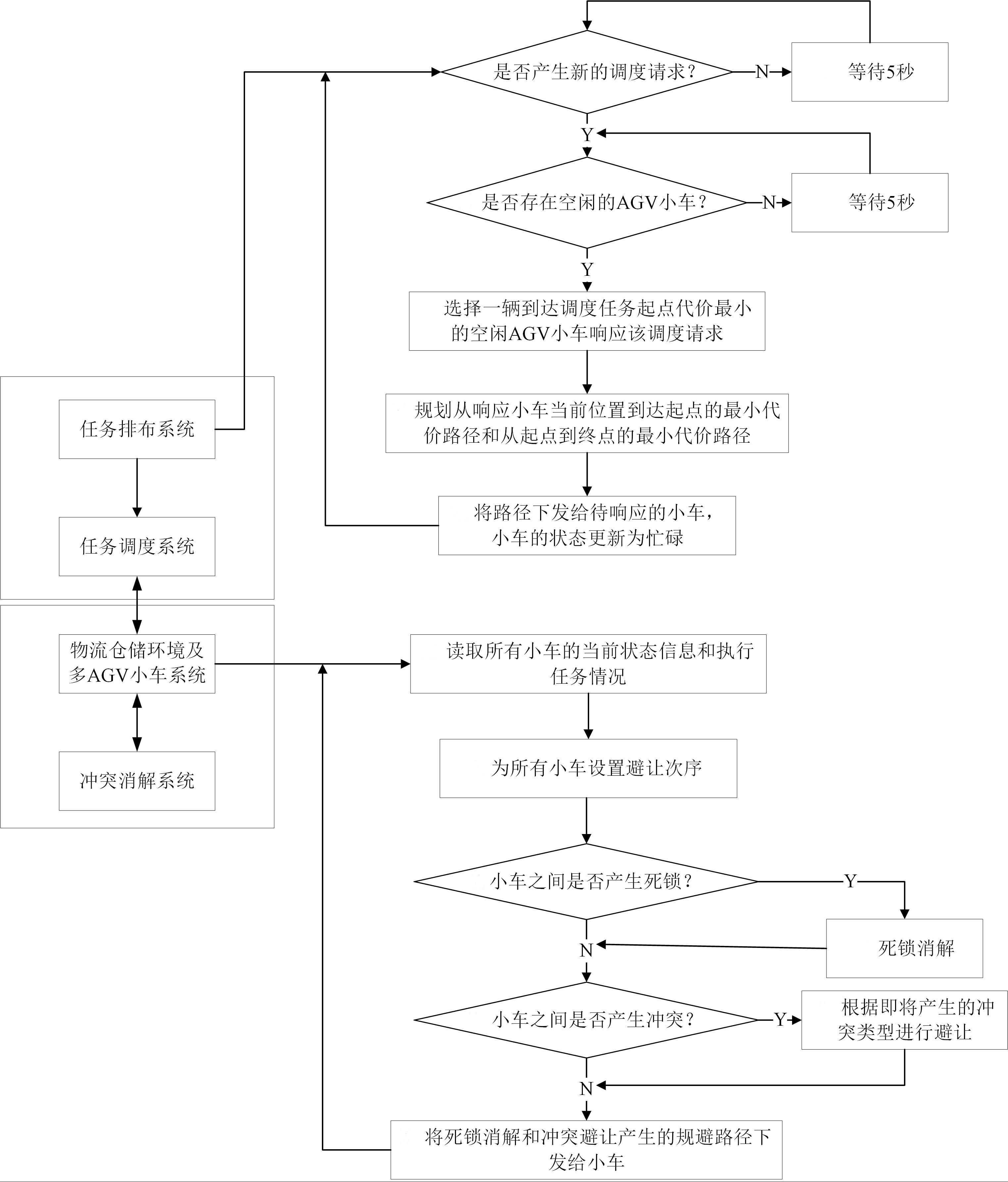
3、一种基于蚁群优化算法的多agv动态路径规划方法,应用于任务系统与路径规划系统上,任务系统包括任务排布系统、任务调度系统;路径规划系统包括物流仓储环境及多agv小车系统和冲突消解系统;其中,任务系统与路径规划系统进行信息交互;包括以下步骤:
4、s1、任务排布系统下发新的货物调度请求,并将货物调度请求下发给任务调度系统;
5、判断当前时刻任务排布系统是否下发了新的货物调度请求,若产生新的调度请求,则执行步骤s2;否则任务调度系统等待5秒,再次判断当前时刻任务排布系统是否下发了新的货物调度请求;
6、s2、物流仓储环境及多agv小车系统获取仓储中所有空闲agv小车;
7、判断当前时刻的物流仓储中是否存在空闲agv小车,若存在空闲agv小车,则执行步骤s3;否则任务调度系统等待5秒,再次判断当前时刻的物流仓储中是否存在空闲agv小车;
8、s3、获取所有空闲状态agv小车的位置,通过物流仓储环境及多agv小车系统和冲突消解系统计算所有空闲agv小车从自身所在位置调度到任务起点的时间代价,选择一辆产生时间代价最小的空闲agv小车响应货物调度请求;
9、s4、根据步骤s3中响应货物调度请求的空闲agv小车,获取其从自身所在位置到任务起点的最优路径,根据步骤s3中所有空闲agv小车从自身所在位置调度到任务起点的时间代价的计算方法,计算响应货物调度请求的空闲agv小车从任务起点到任务终点的最优路径;
10、s5、将步骤s4中从自身所在位置到任务起点的最优路径和从任务起点到任务重点的最优路径发送给响应货物调度请求的空闲agv小车,执行货物调度任务,将响应货物调度请求的空闲agv小车的运行状态变为忙碌。
11、优选的,步骤s3中根据所有空闲agv小车的信息,获取所有空闲状态agv小车的位置,计算所有空闲agv小车从自身所在位置调度到任务起点的时间代价,选择一辆产生时间代价最小的空闲agv小车响应货物调度请求,具体包括:
12、s31、获取当前时刻所有空闲agv小车afj在仓储路网中的位置信息cafj,其中j=1,2,……f,f为当前时刻所有空闲agv小车的总数;
13、所述仓储路网为g=(v,e),是由节点的集合v和边集合e构成的图数据;所述节点的属性为仓储中储物架的入口节点ap或路网中的其他节点lm。
14、具体的,在冲突的预估和消解、死锁消解的算法中结合仓储路网的图数据,可以应用于不同的仓储环境中。
15、s32、根据蚁群优化的最短路径算法为每一辆空闲agv小车afj规划从自身所在的位置cafj调度到任务起点s的最优路径arrivespathj;
16、根据空闲agv小车afj的平均行驶速度vj,计算小车从自身所在的位置cafj调度到任务起点s的时间代价arrivestimej,其中,arrivestimej=arrivespathj/vj;
17、s33、冲突消解系统根据冲突消解算法和死锁消解算法读取空闲agv小车afj从自身所在位置cafj到达任务起点s的过程中与其他忙碌agv小车abi将要发生的冲突类型,其中i=1,2,……b,b为当前时刻所有忙碌agv小车的总数,根据冲突类型计算出额外时间成本extratimej,则空闲agv小车afj从自身所在位置cafj到达任务起点s的时间代价为arrivestimej+extratimej,从所有空闲agv小车afj中选择产生时间代价arrivestimej+extratimej最小的空闲agv小车afj*响应货物调度请求,其到达任务起点s的最优路径为optarrivespathj*;
18、到达任务起点s的最优路径optarrivespathj*包括响应货物调度请求的空闲agv小车afj*从自身所在的位置cafj*调度到任务起点s的最优路径arrivespathj*、死锁消解规避路径和冲突避让规避路径分别产生的时间代价之和最小的情况下所对应的路径。
19、优选的,步骤s33中根据冲突类型计算出额外时间成本extratimej,具体包括:
20、s331、获取所有小车的当前状态信息和执行任务情况:从物流仓储环境及多agv小车系统获取所有忙碌agv小车abi当前的位置信息cabi,正在执行任务的剩余路径信息remainpathi,所有空闲agv小车afj当前所在的位置信息cafj;
21、s332、对所有agv小车设置避让次序规则:agv小车间发生冲突时,优先级低的agv小车规避优先级高的agv小车;
22、s333、根据agv小车的位置信息读取产生死锁的agv小车,计算死锁中的每一辆agv小车消解死锁而产生的额外时间代价,将产生额外时间代价最小的agv小车调度到空闲节点处避让,死锁消解,获取死锁消解规避路径;
23、s334、根据忙碌agv小车abi的位置信息cabi和剩余路径信息remainpathi,空闲agv小车的位置信息cafj读取产生冲突的agv小车,冲突类型包括忙碌agv小车与忙碌agv小车之间产生的冲突,忙碌agv小车与空闲agv小车之间产生的冲突;
24、根据将要产生的冲突类型执行对应的冲突避让方案,获取冲突避让规避路径;
25、s335、将所有死锁消解规避路径和冲突避让规避路径加入到最优路径arrivespathj中;
26、s336、按照s32步骤中的时间代价计算公式,根据agv小车afj的平均行驶速度vj,计算死锁消解规避路径和冲突避让规避路径分别产生的时间代价之和为额外时间成本extratimej;
27、其中最小的额外时间成本extratimej所对应的死锁消解规避路径和冲突避让规避路径为最优的死锁消解规避路径和冲突避让规避路径。
28、优选的,所述蚁群优化的最短路径算法包括:
29、s321、根据仓储路网的节点连接关系,为每个路网节点初始化大小相同的信息素,并初始化包含m只蚂蚁的种群,其出发位置为cafj;
30、s322、选取一只蚂蚁,根据当前节点的邻居的信息素强度和能见度,计算蚂蚁走向不同的邻居节点的概率,即为转移概率;
31、两个相邻节点的距离越小,能见度越高;节点的邻居的信息素值越大,则后来的蚂蚁选择该节点的概率越高;
32、s323、根据转移概率采用轮盘赌方法迭代地找到一条从agv小车所在位置cafj到任务起点s的路径,计算蚂蚁在路径上的每个节点留下的信息素值,选取的蚂蚁死去;
33、s324、迭代地选取其他蚂蚁,计算其从当前节点走向不同邻居节点的转移概率,搜索路径,计算其留下的信息素值,直到m只蚂蚁都到达任务起点s后死去;
34、s325、根据所有蚂蚁留下的信息素值更新路网所有的节点的信息素值;更新m只蚂蚁在经过一次探索后得到的从位置cafj到任务起点s的最短的路径;
35、s326、满足蚁群优化终止条件,输出空闲agv小车afj从自身所在位置cafj到任务起点s的当前最优路径arrivespathj;若未满足蚁群优化终止条件,则种群全部死去,重新生成m只蚂蚁的种群,在更新信息素值的路网上从位置cafj重新迭代寻找最优路径。
36、具体的,基于蚁群优化的最短路径算法,根据信息素和能见度,搜索路径,并更新路网节点的信息素值,通过迭代的方式,获得最短路径,即为最优路径,实现agv小车的实时路径规划。
37、优选的,所述能见度为蚂蚁当前所在节点和其邻居的距离的倒数。
38、具体的,根据信息素和能见度的结合计算蚂蚁走向不同邻居节点的概率,优化了蚁群的最短路径算法。
39、优选的,所述死锁为多个agv小车之间相互避让而产生的闭合避让回路,并且所有agv小车处于暂停状态。
40、具体的,基于闭合回路消解算法的死锁检测和消解算法,能够应付一些调度算法难以避免的死锁情形,实现了多agv的无障碍的自动化调度。
41、优选的,所述避让次序规则的优先级设置为:所有空闲agv小车的优先级低于忙碌agv小车的优先级;所有忙碌agv小车,其开始执行调度任务的时间越早,则该忙碌agv小车的优先级越高。
42、具体的,通过优先级的设定,提高agv小车执行任务的效率,减少冲突产生的额外时间代价,同时实现产生冲突时的最优避让方式,提高agv小车调度方案的高效性和灵活性。
43、优选的,所述忙碌agv小车与忙碌agv小车之间产生的冲突包括单点相向冲突,单点t型冲突,单边冲突和多点冲突;忙碌agv小车与空闲agv小车之间产生的冲突包括忙闲冲突;
44、所述冲突避让方案包括单点相向冲突避让方案,单点t型冲突避让方案,单边冲突避让方案,多点冲突避让方案,忙闲冲突避让方案。
45、具体的,归纳了多agv小车系统中存在的各种冲突类型,可以提前规避任务执行时可能产生的冲突或即将发生的冲突,实现多agv组成的动态调度系统进行智能预测推理能力。
46、优选的,所述单点相向冲突为忙碌agv小车abm的剩余路径remainpathm和忙碌agv小车abn的剩余路径remainpathn存在从第一个位置开始的公共路径段且公共路径段的节点数等于1,并且abm和abn的运行方向相反,则两辆agv小车之间将发生单点相向冲突;
47、所述单点t型冲突为忙碌agv小车abm的剩余路径remainpathm和忙碌agv小车abn的剩余路径remainpathn存在从第一个位置开始的公共路径段且公共路径段的节点数等于1,并且abm和abn的运行方向为相互垂直,则两辆agv小车之间将发生单点t型冲突;
48、所述多点冲突为忙碌agv小车abm的剩余路径remainpathm和忙碌agv小车abn的剩余路径remainpathn存在从第一个位置开始的公共路径段且公共路径段的节点数大于1,并且abm和abn的运行方向相反,则两辆agv小车之间将发生多点冲突;
49、所述单边冲突为忙碌agv小车abm即将经过节点为忙碌agv小车abn刚通过的节点,且忙碌agv小车abn即将经过的节点也是忙碌agv小车abm刚通过的节点,则两辆agv小车之间将发生单边冲突;
50、所述忙闲冲突为空闲agv小车afj出现在忙碌agv小车abn的剩余路径remainpathn上,则忙碌agv小车abn将和空闲agv小车afj产生忙闲冲突。
51、具体的,将冲突类型在仓储路网中的具体情形列出,与冲突消解算法相对应,提高agv小车的调度效率。
52、优选的,所述单点相向冲突避让方案为两辆忙碌agv小车之间发生单点相向冲突,打断优先级较低的小车所在的边的连通性,重新为该agv小车规划一条到达任务起点或终点的最短路径;
53、所述单点t型冲突避让方案为两辆忙碌agv小车之间发生单点t型冲突,优先级较低的agv小车先暂停,优先级较高的agv小车能否通过t型路口;若可以通过,则优先级较低的小车暂停,规避冲突,若不能通过,则优先级较高的小车暂停,规避冲突;
54、所述多点冲突避让方案为两辆忙碌agv小车之间发生多点冲突,根据两辆agv小车的运行速度获取两辆agv小车的相遇位置lmeet,为优先级较低的agv小车规划出一条绕过相遇位置lmeet的最短路径,并发送给优先级低的agv小车;
55、所述单边冲突避让方案为两辆忙碌agv小车之间发生单边冲突,打断优先级较低的小车所在的边的连通性,重新为该agv小车规划一条到达任务起点或终点的最短路径;
56、所述忙闲冲突避让方案为忙碌agv小车和空闲agv小车之间产生忙闲冲突,将空闲agv小车调离产生冲突的位置到最近的空闲点位。
57、具体的,根据不同情况设计了不同的冲突消解算法,从所有的冲突消解方案中选择最小时间代价的消解方案,能够快速恢复多agv调度系统的正常运转。
58、与现有技术相比,本发明取得以下有益效果:
59、本发明在派遣agv响应系统的调度请求时,综合考虑了小车到任务起点的最短路径,可能产生的冲突以及对应的多种候选冲突消解方案,根据最短路径对应的时间成本和最优冲突消解方案对应的时间成本来选择agv小车响应任务需求。
60、将仓储中调度任务在多agv动态系统中的派发问题分解为两个并行独立的任务调度模块和冲突消解与死锁消解模块。其中,任务调度模块以最小时间代价为目标,因此能够规避掉大多数任务执行时可能产生的冲突或即将发生的冲突。冲突消解和死锁消解模块针对可能发生的冲突,从所有的冲突消解方案中选择最小时间代价的消解方案,快速恢复多agv调度系统的正常运转。
61、归纳了多agv小车系统中存在的各种冲突类型,并根据不同情况设计了不同的冲突消解算法。同时本发明提出了一种基于闭合回路消解算法的死锁检测和消解算法,能够应付一些调度算法难以避免的死锁情形。实现了多agv的无障碍的自动化调度。
62、在任务调度时,考虑到了迪杰斯特拉等传统路径规划算法可能无法在给定的时间内找到一条可行的路径,基于蚁群优化算法的路径搜索基础算法赋予了多agv调度在路径生成时的高效性和灵活性。
63、对比传统的agv小车调度算法,按照并行的双线程设计了agv的任务派遣和潜在的冲突消解技术,使得两个模块独立自主的与agv小车系统进行交互。其中在任务分配策略中,调度算法所在的线程实时将任务排布系统下发的任务派发给响应代价最小的agv小车;在路径规划策略中,冲突消解和死锁消解所在的线程能够智能的捕获潜在的冲突并进行消解。同时对于某些死锁情形,死锁消解算法能够自动捕捉到当前的小车状态,启发式的完成死锁消解,实现了多agv调度系统的自动化,智能化和高效化。
- 还没有人留言评论。精彩留言会获得点赞!