一种用于水泥生产的翻板阀运动异常检测系统的制作方法
本发明涉及人工智能和图像处理,尤其涉及一种用于水泥生产的翻板阀运动异常检测系统。
背景技术:
1、水泥生产过程中翻板阀的作用主要是控制水泥、粉状物料等流体的流动。水泥生产过程中翻板阀工作的原理是通过气动执行机构控制阀板的开启和关闭,从而实现对流体的控制。
2、而翻板阀会因为各种原因出现工作异常,比如重锤过轻、过重或脱落,阀板卡死,堵料,化学腐蚀,高温烧坏,质量问题等,需要维护人员及时处理,对于上述情况,快速发现并准确定位翻板阀的异常状态是必不可少的。现有技术中对于翻板阀常见的检修方式为人工巡检,由负责巡检的技术人员,定时排查翻板阀状态,确保翻板阀能够正常工作。这种排查方式不仅效率极低,浪费人力资源,且根本不能及时发现翻板阀异常状况,因此,本发明提出了一种用于水泥生产的翻板阀运动异常检测系统。
技术实现思路
1、本发明的目的是为了解决现有技术中不能及时发现、不能准确定位翻板阀异常状态等问题,降低生产过程延误所带来的检修成本,而提出的一种无巡检,对翻板阀状态全天实时自动监控的方法。
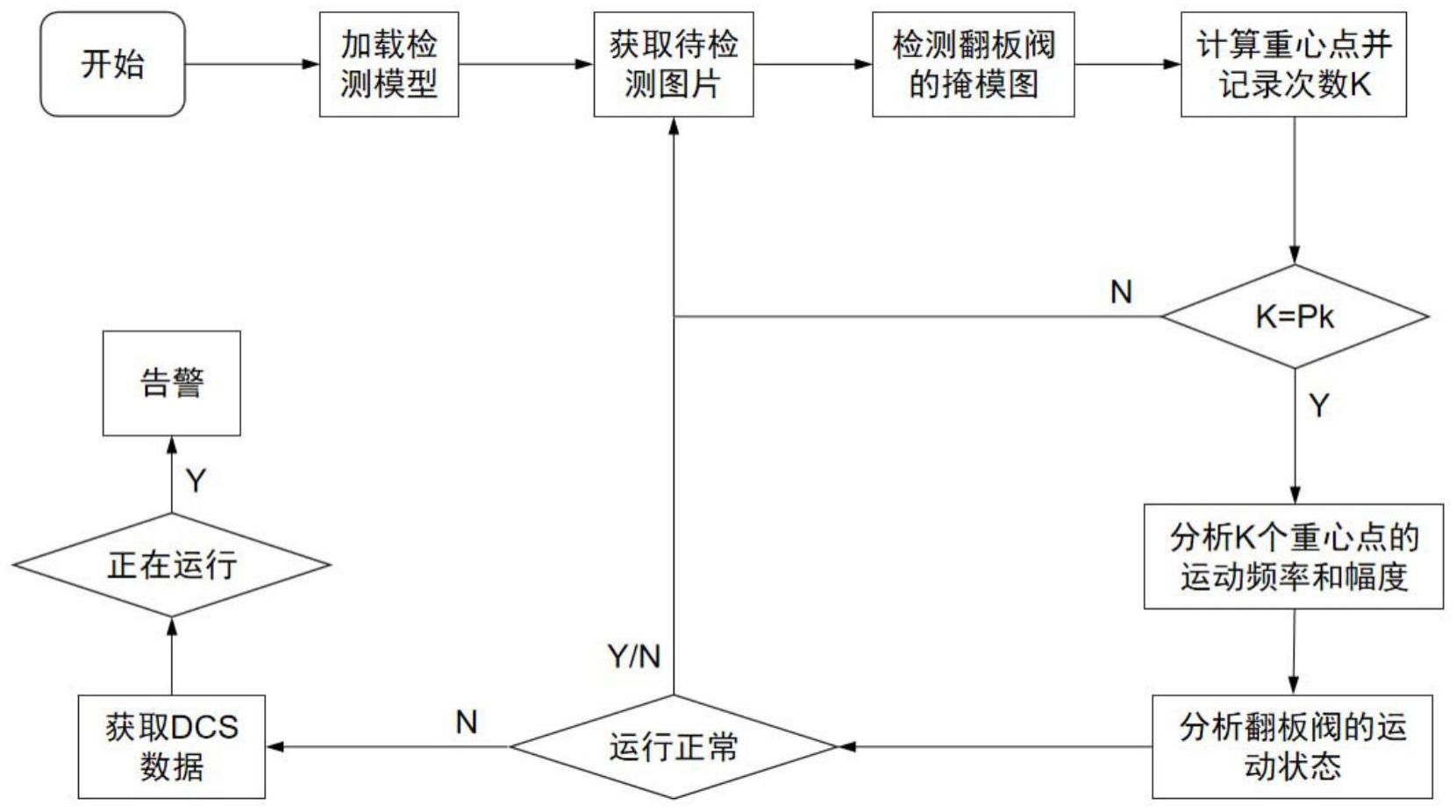
2、一种用于水泥生产的翻板阀运动异常检测系统,包括按照顺序依次进行工作的7个模块,分别是图像采集模块、ai检测模块、数据记录模块、数据分析模块、状态分析模块和告警模块,通过上述模块进行翻板阀运动异常检测并采用如下步骤:
3、a.开始,启动系统,加载计算机和硬件资源,以及检测模型;
4、b.获取待检测图片,首先获取监控相机传输的视频流并解码为图片数据,根据预先设置的矩形roi区域,将roi包括的区域从图片中裁剪出来;
5、c.ai分析,将步骤b中裁剪出来的roi图片送入yolov8分割网络中,经过模型推理得到翻板阀的掩模图及其翻板阀在roi图片中的相对位置;
6、d.计算重心点并记录数据,将得到的掩模图计算翻板阀的重心点坐标,将该重心点按照顺序记录下来;
7、e.当记录次数达到预先设定的次数,则进行步骤f,若没有达到预先设定的次数,则再次执行步骤b、步骤c和步骤d;
8、f.数据分析,对连续多次的翻板阀的重心点坐标进行数据分析,其中包括中位数、平均值,以及翻板阀在连续运动的过程中的周期、频率和幅度;
9、g.运动状态分析,根据翻板阀在连续运动过程中的频率和幅度,判断运动频率是否大于设定最小频率,以及运动有效频率的数量是否大于设定的最小有效频率数量;
10、h.根据状态分析得到当前翻板阀的运动状态是否正常,若翻板阀运行正常,返回步骤b,开始新一轮的状态检测,若翻板阀的运行不正常,转至步骤i;
11、i.实时读取dcs系统的数据,查看翻板阀是否处于工作状态;
12、j.若处于工作状态,则根据步骤h的结果,若运动异常则立即告警,转步骤k,若运动无异常则不告警;若经过dcs系统的数据读取,翻板阀不处于工作状态,则不告警;
13、k.告警,及时告警并通过负责人检查。
14、优选地,图像采集模块使用一个能够正对着翻板阀的监控相机,调整并固定监控相机和翻板阀保持在同一水平线上,通过读取监控相机的视频流实时数据,并间隔解码为单张图片数据ii∈r2,在图片数据上自动选择能够将翻板阀完全包括的矩形roi区域,并设定该矩形roi区域坐标相对图像坐标为(x,y,w,h)。
15、优选地,在ai检测模块中,根据图片数据和矩形区域坐标,将矩形区域从图片中ii裁剪出来,其中裁剪出来的roi图为ci∈r2。之后对ci做缩放和填充处理,使其统一到640×640的图像大小;
16、检测方法采用的是最新目标检测网络yolov8,该网络主要分为三个部分,分别是骨干网络、融合网络和预测网络;
17、骨干网络将640×640的输入图片下采样5次分别得到20×20,40×40,80×80三张不同尺寸的特征图,之后经过融合网络将不同大小的特征图的特征批次融合;
18、融合网络采用两个特征金字塔的网络结构,最后每一个融合后的特征图连接预测网络;
19、预测网络有两个分支,分别是检测分支和分割分支,检测分支对于每一个目标预测类别、边框和α个掩码系数,分割分支针对当前输入图片,输出α个掩码原型图,之后对于每一个目标,将α个掩码系数和α个掩码原型图矩阵乘,得到输入图片的实例分割结果。
20、优选地,数据记录模块中,计算掩模图中表示的翻板阀的重心点pi,设定掩模图中共有n个表示翻板阀的点,那么将翻板阀的重心点的位置坐标记录至重心序列p中,即pi∈p。
21、
22、同时预测k张图片{i1,i2,i3,…,ik},重复k次ai检测模块和数据记录模块,得到k个掩模图{c1,c2,c3,…,ck}和重心点{p1,p2,p3,…,pk},得到具有序列为k的重心序列p={p1,p2,p3,…,pk}。
23、优选地,数据分析模块中,确认是翻板阀在正常运动时是否是一种周期运动,并在计算运动周期时只选用垂直方向的重心值。
24、数据分析模块在预测次数k达到设定值pk后开始工作,预先定义参数如下:pm表示偏移中位数的最小像素值,pf为最小频率阈值,pv为最小有效频率次数阈值,数据分析步骤如下:
25、(1)计算序列为k的重心序列p在垂直方向上的中位数m和平均值a,公式如下,其中n为序列p的长度(对于不同的翻板阀选择不同的方法,中位数和平均值选其一即可);
26、
27、(2)依次遍历重心序列p,若序列p中的一点满足以下两个公式中的一个,则认为是最高或最低点:
28、
29、在式1和式2中,表示在重心序列p中第i个重心点的y坐标,my表示重心序列p的中位数m的y坐标;
30、当满足式(1)时,加入到最高点序列hmax;当满足式(2)时,加入到最低点序列hmin,i表示重心序列p中第i个重心点;
31、(3)根据上述得到的最高点序列hmax,依次计算相邻两个顶点之间的时间间隔,进而得到频率,公式如下:
32、
33、
34、对于上述公式,计算相邻两个顶点之间的时间间隔,得到两个顶点之间的时间差值,即周期tmax,频率fmax通过周期t的倒数得到;
35、同理,最低点序列hmin的计算周期、频率的计算方法和最高点序列的计算方法一致,可以得到tmin和fmin;
36、计算幅度d采用的是k个预测次数中的最高点和最低点的差值,即:
37、d=max(hmax)-min(hmin)。
38、优选地,在状态分析模块中,获得翻板阀在一段时间内的频率和幅度之后,预先定义参数如下:pf为最小频率阈值,pv为最小有效频率次数阈值。
39、判断条件1:判断是否满足在高点的摆动频率fmax大于设定的阈值pf,即:
40、fmax>pf
41、判断条件2:频率序列fmax的个数是否大于最小有效频率次数阈值,即:
42、∑fmax>pv
43、将满足条件1的fmax加入到频率序列fmax中,进行判断条件2。
44、优选地,告警模块输入状态分析模块结果和翻板阀是否应该处于工作状态结果,翻板阀是否应该处于工作通过dcs控制系统获取。
45、优选地,在yolov8的训练过程中,使用随机裁剪增广的方法。
46、与现有的技术相比,本发明优点在于:
47、(1)本发明提出了一套完整的翻板阀运动状态识别方法,通过对监控相机的实时智能分析,能够对翻板阀的运动状态全天实时自动监控,以及实时分析翻板阀的摆动频率和幅度,当翻板阀一旦出现异常运动,则立刻告警及时解决。减少了定期检查和维护,提高水泥生产的品质,保证水泥生产的持续进行。
48、(2)本发明所设计的翻板阀检测分割模型,通过使用随机裁剪增广的方法,提高了翻板阀检测分割模型的鲁棒性,相较于传统方法容易丢失或者扩充翻板阀的掩模图,本发明的模型能够得到一个清晰完整准确的翻板阀掩模图,为后续的数据分析提供了强有力的准确数据。
49、(3)本发明通过对翻板阀运动状态的观察,发现翻板阀的摆动是一种规律性的周期运动,根据该发现,提出通过翻板阀的摆动频率来判断翻板阀的摆动是否正常的方法,该方法简单实用,准确可靠,通过对翻板阀的实际测试,准确率能够达到99%以上。
- 还没有人留言评论。精彩留言会获得点赞!