一种地图处理方法、装置及设备与流程
本公开涉及计算机信息处理,特别是指一种地图处理方法、装置及设备。
背景技术:
1、在对地图的车道线进行实采的过程中,由于网络信号和数据处理等实际问题,在数据输出时容易丢失部分散点,然而,在自动驾驶仿真中需要有连续的车道线来引导控车算法,目前尚未有针对散点高精地图的车道线补全方案。
2、公开内容
3、本公开要解决的技术问题是如何提供一种地图处理方法、装置及设备。能够针对散点高精地图,进行车道线的补全,从而得到完整的散点高精地图。
4、为解决上述技术问题,本公开的技术方案如下:
5、一种地图处理方法,地图处理方法包括:
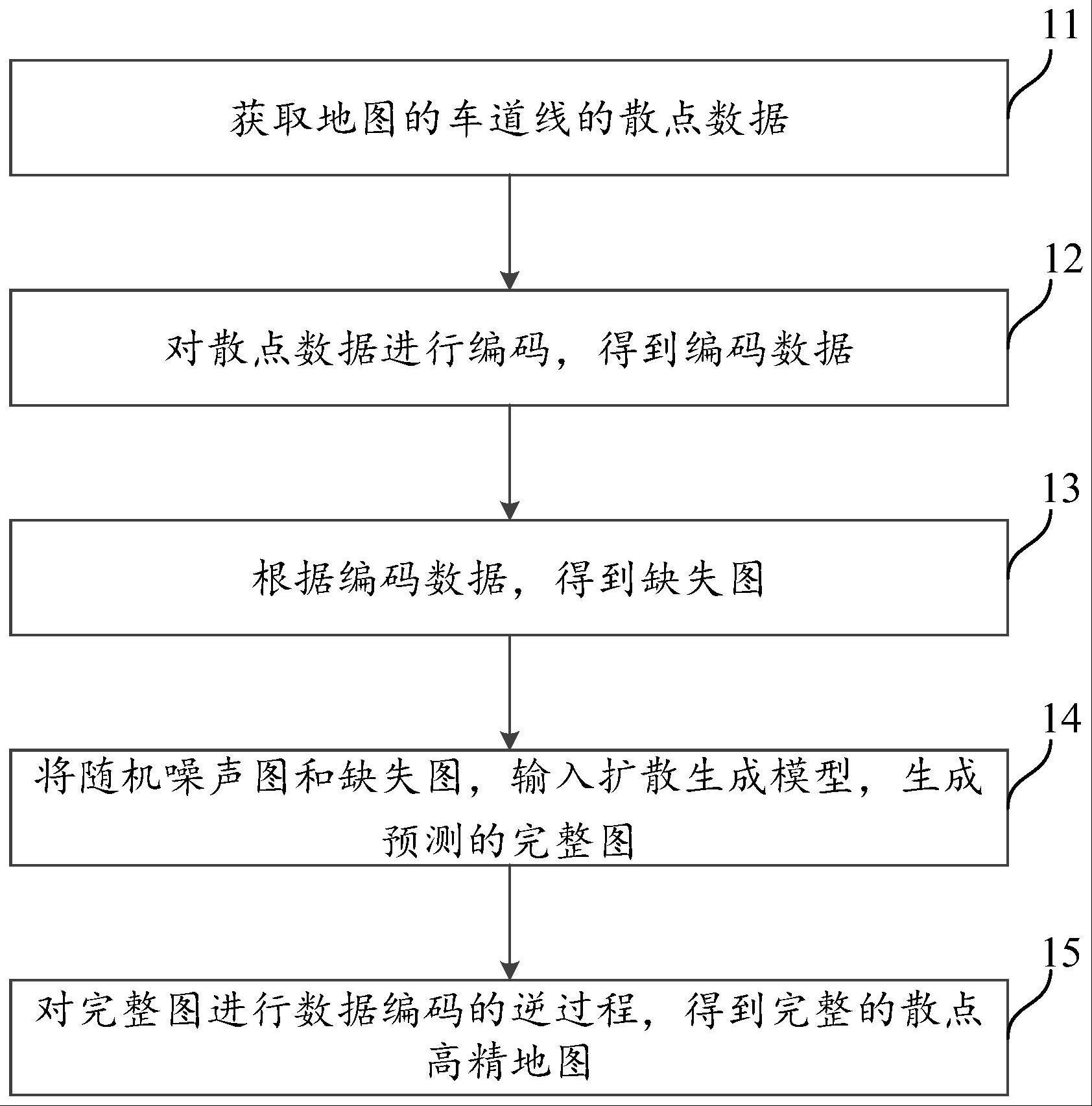
6、获取地图的车道线的散点数据;
7、对散点数据进行编码,得到编码数据;
8、根据编码数据,得到缺失图;
9、将随机噪声图和缺失图,输入扩散生成模型,生成预测的完整图;
10、对所述完整图进行数据编码的逆向处理,得到完整的散点高精地图。
11、可选的,对散点数据进行编码,得到编码数据,包括:
12、按照编码矩阵,对散点数据按照车道线方向进行编码,得到编码数据的矩阵;编码数据的矩阵中车道线的元素填充值为(cos(θ),sin(θ));
13、其中,θ为pn+1和pn之间的夹角,pn为x轴,pn+1为与x轴呈θ的角度的车道线。
14、可选的,根据编码数据,得到缺失图,包括:
15、对编码数据进行分析处理,确定编码数据中包含的车道线数据;
16、创建与编码数据尺寸相同的空图,并将空图中所有的像素值初始化为目标值;
17、遍历空图中的每一个目标值,得到缺失图。
18、可选的,扩散生成模型通过以下过程训练:
19、获取无缺失车道线的训练地图;
20、获取训练地图的车道线的散点的完整编码值;
21、对编码数据进行增强处理,得到增强数据;
22、在完整的编码值中,随机去掉部分车道线或者路口,得到训练数据集;
23、对训练数据集,以固定时间步数不断加高斯噪声直至成为完全噪声,并存储每一步的加噪图;
24、对加噪图进行反向去噪过程,得到扩散生成模型。
25、可选的,对编码数据进行增强处理,得到增强数据,包括:
26、对车道线的方向编码数据进行旋转计算,得到增强数据;或者
27、在原始的高精地图编码图像中以固定大小窗口进行随机滑动采样,得到增强数据。
28、可选的,将随机噪声图和缺失图,输入扩散生成模型,生成预测的完整图,包括:
29、将随机噪声图和缺失图在通道维度上进行拼接处理,得到拼接图;
30、将拼接图输入至扩散生成模型中进行处理,得到预测的完整图;预测的完整图和缺失图的尺寸相同。
31、可选的,对所述完整图进行数据编码的逆向处理,得到完整的散点高精地图,包括:
32、获取完整图中编码后的数据矩阵;
33、遍历数据矩阵中的每一个元素,并计算每一个元素的角度;
34、确定元素的角度对应的车道线的方向;
35、根据元素的角度对应的车道线的方向,将每一个元素的位置数据作为散点坐标,将每一个元素的角度作为散点的属性,确定完整的散点高精地图。
36、本公开还提供一种地图处理装置,地图处理装置包括:
37、获取模块,用于获取地图的车道线的散点数据;
38、处理模块,用于对散点数据进行编码,得到编码数据;根据编码数据,得到缺失图;将随机噪声图和缺失图,输入扩散生成模型,生成预测的完整图;对完整图进行数据编码的逆过程,得到完整的散点高精地图。
39、可选的,处理模块包括:
40、第一处理子模块,用于按照编码矩阵,对散点数据按照车道线方向进行编码,得到编码数据的矩阵;编码数据的矩阵中车道线的元素填充值为(cos(θ),sin(θ));
41、其中,θ为pn+1和pn之间的夹角,pn为x轴,pn+1为与x轴呈θ的角度的车道线。
42、可选的,处理模块还包括:
43、第二处理子模块,用于对编码数据进行分析处理,确定编码数据中包含的车道线数据;
44、第三处理子模块,用于创建与编码数据尺寸相同的空图,并将空图中所有的像素值初始化为目标值;
45、第四处理子模块,用于遍历空图中的每一个目标值,得到缺失图。
46、可选的,处理模块还包括:
47、第五处理子模块,用于获取无缺失车道线的训练地图;
48、第六处理子模块,用于获取训练地图的车道线的散点的完整编码值;
49、第七处理子模块,用于对编码数据进行增强处理,得到增强数据;
50、第八处理子模块,用于在完整的编码值中,随机去掉部分车道线或者路口,得到训练数据集;
51、第九处理子模块,用于对训练数据集,以固定时间步数不断加高斯噪声直至成为完全噪声,并存储每一步的加噪图;
52、第十处理子模块,用于对加噪图进行反向去噪过程,得到扩散生成模型。
53、可选的,第七处理子模块还包括:
54、第一处理子单元,用于对车道线的方向编码数据进行旋转计算,得到增强数据;或者
55、第二处理子单元,用于在原始的高精地图编码图像中以固定大小窗口进行随机滑动采样,得到增强数据。
56、可选的,处理模块还包括:
57、第十一处理子模块,用于将随机噪声图和缺失图在通道维度上进行拼接处理,得到拼接图;
58、第十二处理子模块,用于将拼接图输入至扩散生成模型中进行处理,得到预测的完整图;预测的完整图和缺失图的尺寸相同。
59、可选的,处理模块还包括:
60、第十三处理子模块,用于获取完整图中编码后的数据矩阵;
61、第十四处理子模块,用于遍历数据矩阵中的每一个元素,并计算每一个元素的角度;
62、第十五处理子模块,用于确定元素的角度对应的车道线的方向;
63、第十六处理子模块,用于根据元素的角度对应的车道线的方向,将每一个元素的位置数据作为散点坐标,将每一个元素的角度作为散点的属性,确定完整的散点高精地图。
64、本公开还提供一种计算设备,包括:处理器,存储器及存储在存储器上并可在处理器上运行的程序或指令,程序或指令被处理器执行时实现如上的方法的步骤。
65、本公开还提供一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如上的方法的步骤。
66、本公开的上述方案至少包括以下有益效果:
67、本公开的上述方案,通过获取地图的车道线的散点数据;对散点数据进行编码,得到编码数据;根据编码数据,得到缺失图;将随机噪声图和缺失图,输入扩散生成模型,生成预测的完整图;对完整图进行数据编码的逆过程,得到完整的散点高精地图。能够针对散点高精地图,进行车道线的补全,从而得到完整的散点高精地图。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!