一种时变流道结构的三维瞬变水锤计算方法及系统
本发明涉及计算流体力学,尤其涉及一种时变流道结构的三维瞬变水锤计算方法及系统。
背景技术:
1、计算流体力学(computational fluid dynamics,简称cfd)技术由于成本低,周期短等优点,被广泛应用于建筑、能源、航天以及水下发射系统等领域,从而实现优化设计、性能预测和研究分析的目的。活塞在有压管道内运动推水过程中速度的突然变化会产生由于运动边界引起的三维瞬变水锤压力脉动,严重影响流场压力的稳定性,增大了结构振动噪声和流噪声。因此,采用cfd方法预测这种三维瞬变水锤压力脉动,对于此种模拟结构的设计研发具有重要意义。
2、现有关于水锤现象的数值计算方法研究主要关注于长距离输水管路,将其简化为一维固定流道结构,对象是固定位置阀门的快速启闭引起的水锤现象。然而,模拟结构模拟运动活塞在有压管道内运动会形成时变流道结构,且运动活塞制动时形成的水锤具有三维瞬变特征,因此采用传统的cfd数值计算方法不能准确有效预测上述时变流道结构的三维瞬变水锤现象。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种时变流道结构的三维瞬变水锤计算方法及系统。
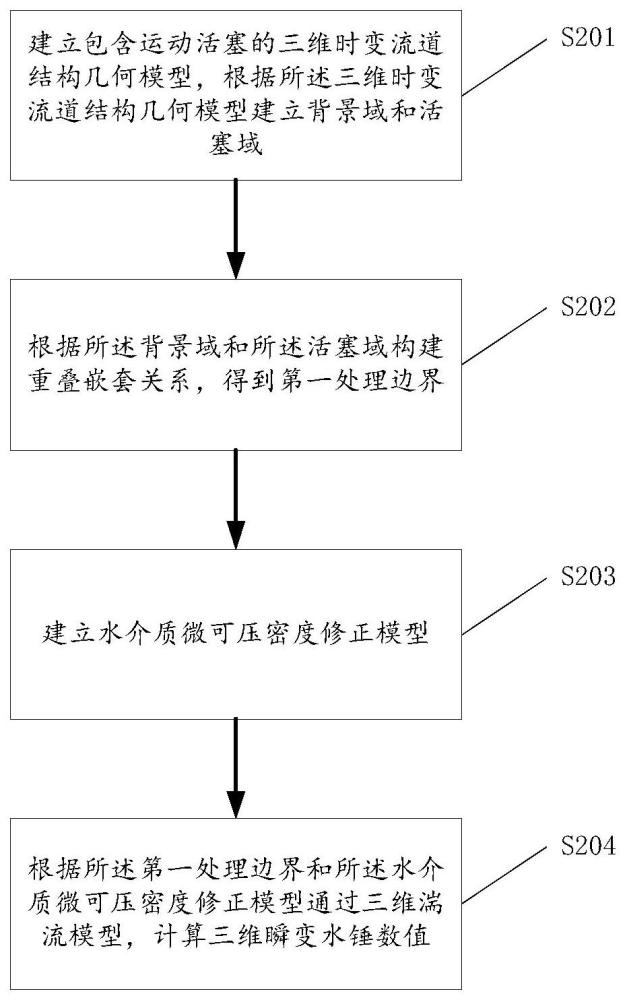
2、一种时变流道结构的三维瞬变水锤计算方法,包括以下步骤:
3、建立包含运动活塞的三维时变流道结构几何模型,根据所述三维时变流道结构几何模型建立背景域和活塞域;
4、根据所述背景域和所述活塞域构建重叠嵌套关系,得到第一处理边界;
5、建立水介质微可压密度修正模型;
6、根据所述第一处理边界和所述水介质微可压密度修正模型通过三维k-ε湍流模型,计算三维瞬变水锤数值。
7、在其中一个实施例中,建立包含运动活塞的三维时变流道结构几何模型,根据所述三维时变流道结构几何模型建立背景域和活塞域包括:
8、使用solidworks建立包含运动活塞和封闭循环流道的三维时变流道结构几何模型;其中,所述三维时变流道结构几何模型包括多个网格单元;
9、建立固定基准坐标系,以运动活塞质心为原点建立随动坐标系,得到包含运动活塞的局部区域;
10、对所述封闭循环流道做包面处理,得到背景域;
11、对所述局部区域和所述运动活塞做布尔运算,得到活塞域。
12、在其中一个实施例中,根据所述背景域和所述活塞域构建重叠嵌套关系,得到第一处理边界包括:
13、设置所述活塞域和所述背景域的活塞运动控制方程;
14、对所述活塞域进行初始化处理,得到多个受体网格单元;
15、对所述背景域进行初始化处理,得到多个供体网格单元;
16、根据所述受体网格单元和所述活塞运动控制方程获取重叠的供体网格单元;根据所述供体网格单元进行重叠质量守恒处理,得到重叠单元;
17、对所述重叠单元进行识别装配,得到第一处理边界。
18、在其中一个实施例中,根据所述受体网格单元获取重叠的供体网格单元包括:
19、根据线性插值方法进行供体网格单元搜索。
20、在其中一个实施例中,根据所述供体网格单元进行重叠质量守恒处理,得到重叠单元包括:
21、根据所述供体网格单元进行重叠质量守恒处理,得到重叠区域;
22、对所述重叠区域进行初始化,得到重叠单元。
23、在其中一个实施例中,根据所述供体网格单元进行重叠质量守恒处理包括:
24、根据如下公式进行质量守恒:
25、mcorr=mcorrent-mref
26、
27、
28、其中,mcorr表示校正质量;mcorrent表示校正后质量;mref表示初始总质量,f表示比例因子,vi表示网格单元体积;ρ表示表示压强为p时水介质的密度;表示源项;dt表示时间步长;
29、将源项添加到守恒方程中实现质量守恒。
30、在其中一个实施例中,建立水介质微可压密度修正模型包括:
31、
32、其中,ρ表示压强为p时水介质的密度,ρ0表示参考压力下水介质的密度,αρ1、αρ2和γw表示预设修正系数,p表示水介质实际压强,p0表示参考压力,β表示水中波速,k′0表示修正后的水介质体积弹性模量;
33、可压缩流体的状态方程如下:
34、p=a+bρn
35、其中,p表示水介质实际压强,a和b表示假设体积模量是压力的线性函数确定的系数,ρ表示表示压强为p时水介质的密度,n表示密度指数;
36、状态方程可以简化为如下:
37、
38、k=k0+nδp
39、δp=p-p0
40、其中,ρ表示压强为p时水介质的密度,ρ0表示参考压力下水介质的密度,k表示压强为p时水介质的体积弹性模量,k0表示参考压力下水介质的体积弹性模量,n表示密度指数,δp表示压力的变化量,p0表示参考压力,p表示水介质实际压强;
41、对所述参考压力下水介质的体积弹性模量根据如下公式进行修正:
42、k′0=k0/(1+k0d/ee)
43、其中,k′0表示修正后的水介质体积弹性模量,d表示管路直径,k0表示参考压力下水介质的体积弹性模量,e表示管壁厚度,e表示管路材料的弹性模量。
44、在其中一个实施例中,根据所述第一处理边界和所述水介质微可压密度修正模型通过三维k-ε湍流模型,计算三维瞬变水锤数值包括:
45、所述三维k-ε湍流模型如下所示:
46、连续性方程:
47、动量方程:
48、k方程:
49、ε方程:
50、式中,表示偏导符号,ρ表示压强为p时水介质的密度,t表示时间,ui和uj表示速度分量,xi和xj表示位移分量,p表示水介质实际压强,μ表示压强为p时水介质的粘性系数,μt表示湍流粘性系数,k表示湍动能,ε表示湍动能耗散率,σk和σε表示k和ω的扩散率,g表示平均速度梯度产生的湍流动能,c1ε和c2ε表示湍动能修正系数;
51、
52、其中,μt表示湍流粘性系数,ρ表示压强为p时水介质的密度,cμ表示粘性修正系数,k表示湍动能,ε表示湍动能耗散率。
53、在其中一个实施例中,根据所述第一处理边界和所述水介质微可压密度修正模型通过三维k-ε湍流模型,计算三维瞬变水锤数值,之前还包括:
54、判断所述第一处理边界切削是否准确;
55、响应于所述第一处理边界切削不准确,对所述重叠受体单元进行识别装配,得到新第一处理边界。
56、一种时变流道结构的三维瞬变水锤计算系统,用于实现如上所述的一种时变流道结构的三维瞬变水锤计算方法,包括:
57、模型构建模块,用于建立包含运动活塞的三维时变流道结构几何模型,根据所述三维时变流道结构几何模型建立背景域和活塞域;
58、边界处理模块,用于根据所述背景域和所述活塞域构建重叠嵌套关系,得到第一处理边界;
59、修正建立模块,用于建立水介质微可压密度修正模型;
60、数值计算模块,用于根据所述第一处理边界和所述水介质微可压密度修正模型通过三维k-ε湍流模型,计算三维瞬变水锤数值。
61、相比于现有技术,本发明的优点及有益效果在于:本发明能够应用重叠网格方法实现运动活塞运动的时变流道结构,利用k-ε湍流模型模拟运动结构作用下流场演化状态,并结合自定义水介质微可压密度修正模型保障水锤压力脉动的产生和传播。本方法考虑了运动活塞与微可压缩水介质的流固耦合运动,实现模拟运动活塞在有压管道内运动过程中时变流道结构的水锤压力脉动准确预测,从而优化性能设计,提高快速迭代修正的设计能力。
- 还没有人留言评论。精彩留言会获得点赞!