一种基于信号空间变换的线谱检测前跟踪方法及多目标分辨方法
本发明属于水声,具体涉及一种基于信号空间变换的线谱检测前跟踪方法及多目标分辨方法。
背景技术:
1、传统的信号跟踪前检测(dbt)方法是基于经过检测器阈值处理的点迹数据,在信噪比较低的水声环境下,易出现漏检、虚警等情况,制约了被动声呐阵列的探测性能。而针对低信噪比目标所提出的检测前跟踪(tbd)方法为本问题提供了解决思路。检测前跟踪类的算法根据其思路侧重的不同可以大致可以分为侧重于检测和侧重于跟踪,侧重于检测的tbd算法主要从长时间非相干积分的思想出发,对多个时间帧的信号轨迹点进行能量的累积,该类方法的难点在于目标运动带来的信号轨迹的非线性与预测困难,很多方法将此转化为对目标模型运动参数的估计。跟踪为主的tbd方法侧重于估计、预测目标每一时刻的状态,目前最为广泛使用的为递归贝叶斯滤波技术,这类方法通过设定目标的状态转移模型,根据下一时刻的观测值不断预测、更新迭代,以达到最优的每一时刻的状态估计。目前,侧重于目标跟踪的方法已发展得较为完善,不仅有对多目标的跟踪,还同时考虑了目标的生灭过程、两目标交汇时的跟踪以及目标运动模型随时间变化等情况,但其在对环境信噪比的要求上仍未获得较大的突破,反映在被动声纳信号处理领域即为,获得准确目标轨迹跟踪的信噪比要求为人眼能够在方位历程图或lofar图上隐约看见目标轨迹。
2、为处理极低信噪比环境下的线谱信号,在上述思想的指导下,目前已提出了一些空频联合线谱检测与跟踪方法,由于阵列获取的信号包含时间-频率-空间三个维度,对于阵列信号中的线谱的检测跟踪,在三维空间下进行考虑可以获取更高的增益。对于三维空间中线谱的非相干积分,典型的方法一在时间-空间-频率三维空间中搜索最优线谱轨迹,再沿着最优线谱轨迹对多帧fraz谱进行累积,该方法建立的目标匀速运动模型中,确认一条轨迹需对目标运动过程中的五个参数进行搜索,已经提出了穷举法、二次收敛的牛顿法、模拟退火法以及粒子群优化算法对参数进行迭代搜索,总的来说,该方法仍然受限于在三维空间中搜索一条曲线带来的较大的计算量,且当信噪比非常低时,错误轨迹上的能量累积值并不一定低于真实轨迹上的。方法二为将频率-方位角(fraz)谱的时间序列建模为隐马尔可夫过程,通过维特比算法同时估计每一时刻的频率和方位角。该方法充分利用线谱信号在方位、频率两个维度上的稳定性这一信息,提升了在低信噪比条件下线谱的检测性能,然而,三维空间中运用维特比算法,计算复杂度高,且在极低的信噪比下,轨迹跟踪的概率受周边其他频率、方位的噪声影响严重。方法三提出了一种针对匀速直线运动目标的时空频信号变换方法,通过视在方位变换,使得信号轨迹点均位于三维信号空间中一个平面切片上。该方法使用遍历搜索切片,运算量大,且其代价函数由切片上radon变换的最大值确定,其建立在信号轨迹在切片上为一条直线的假设之上,理论上未能累加到完整的信号轨迹点上的能量值。到目前为止,对于低信噪比下运动目标的多帧累积仍缺少一种简单、快速且有效的方法。
技术实现思路
1、本发明提供一种基于信号空间变换的线谱检测前跟踪方法,用以解决现有的计算繁复迅速、计算量大的基于信号空间变换的线谱检测前跟踪的问题。
2、本发明提供一种基于信号空间变换的多目标分辨方法,基于信号空间变换的线谱检测前跟踪结果进行分析实现。
3、本发明通过以下技术方案实现:
4、一种基于信号空间变换的线谱检测前跟踪方法,所述线谱检测前跟踪方法具体为,
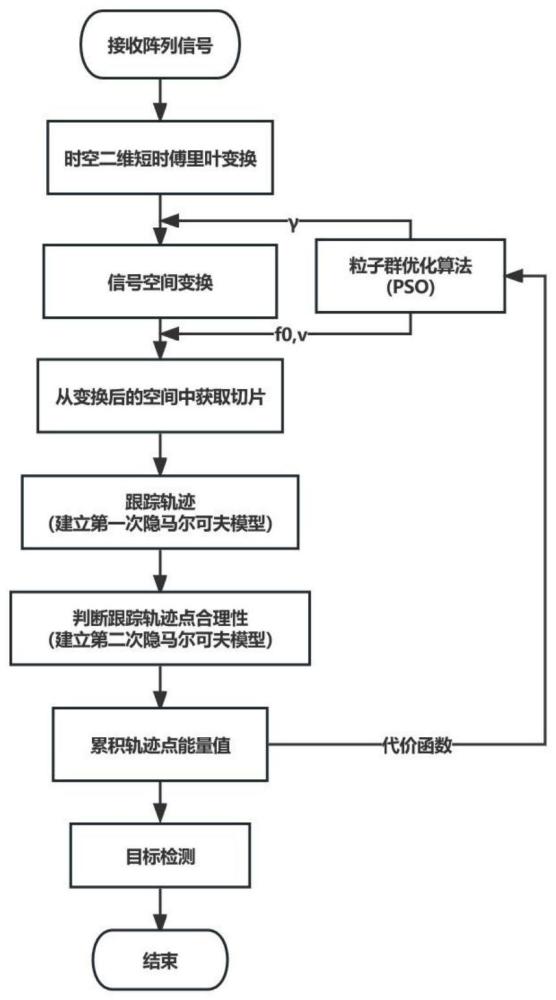
5、步骤1:对接收到的水听器阵列信号进行时空域处理,给出频率-方位角-时间三维空间上的目标辐射声信号功率谱输出表达式;
6、步骤2:将步骤1的三维信号空间上的功率谱输出结果根据参数目标航向进行视在方位变换,获得频率-舷角的余弦值-时间三维空间上的目标辐射声信号功率谱输出结果;
7、步骤3:基于步骤2获得的三维空间上的目标辐射声信号功率谱输出结果,根据参数目标速度和发射信号频率获取功率谱切片;
8、步骤4:基于步骤3获得的功率谱切片,建立隐马尔可夫hmm模型;
9、步骤5:基于步骤4获得的隐马尔可夫hmm模型,利用维特比算法跟踪目标轨迹;
10、步骤6:将步骤3获取的功率谱切片上得到的跟踪目标轨迹点上的功率谱值进行累积;
11、步骤7:将步骤6累积的功率谱值构造为参数寻优算法中的代价函数;
12、步骤8:以步骤7得到的代价函数为判断准则,对寻优算法进行迭代计算直至收敛,然后给出目标检测、参数估计与轨迹跟踪的结果。
13、进一步的,所述步骤1具体为,对m个阵元组成的水平线列阵接收到的目标辐射声信号s(t)作短时二维傅里叶变换,获得频率-方位角-时间三维空间(f-α-t)上的目标辐射声信号功率谱输出表达式:
14、
15、其中,τp表示时间窗滑动第p次所取得的第p段信号对应的时间,n为每段信号的点数,c为水中声速,ω表示频率,α为方位角,为波数矢量,f0为目标发射单频信号的频率;为初始时刻目标所在位置与接收阵几何中心位置之间的距离矢量;设时间窗窗长为t0秒,认为该段时间内接收信号频率、目标方位角近似不变,对应第p段信号用ωp、α(τp)表示。
16、进一步的,所述步骤2具体为,对得到的频率-方位角-时间三维空间(f-α-t)上的目标辐射声信号功率谱输出结果进行如下式的坐标变换:
17、
18、其中,γ0为自真北线顺时针方向计量到目标航向线的角度,为一个常数;根据参数γ0进行坐标变换,得到新的三维空间(f-cosθ-t)上的目标辐射声信号功率谱输出结果。
19、进一步的,所述步骤3具体为,对得到的(f-cosθ-t)三维空间上的目标辐射声信号功率谱输出结果,根据参数发射信号频率f0和目标速度v确定(f-cosθ)平面中的一条直线a,在(f-cosθ-t)三维空间中取直线a与时间轴t构成的一张切片。
20、进一步的,所述步骤5具体为,基于取得的空间切片上以频率f为隐藏状态,以切片上每一个频率f和时间t所对应的像素点上的功率谱值为观测值,建立隐马尔可夫hmm模型;
21、利用维特比算法跟踪得到目标轨迹f(t)后,以目标存在与否为隐藏状态,以每一时刻跟踪到的频率值为观测值再次建立隐马尔可夫hmm模型,根据轨迹的连续性,认为连续的两个时刻距离超过正常范围的点为跟踪错误的轨迹点,即不合理点,利用维特比算法对每个跟踪轨迹点进行合理性判断,去除判断为目标不存在的轨迹点。
22、进一步的,所述步骤7具体为,
23、将保留的轨迹点对应的功率谱值加和,作为该组参数[γ0,f0,v]的代价函数值,采用粒子群参数优化算法进行迭代计算,直到各参数收敛,找到使得代价函数值最大的一组参数[γ0,f0,v]。
24、进一步的,所述步骤8具体为,
25、将搜索得到的代价函数的最大值与根据实际海洋环境所设定的检测阈值对比得到目标检测结果;
26、当高于检测阈值则判定目标存在,反之目标不存在;
27、当目标判定为存在时,最大的代价函数值所对应的一组参数则为目标参数估计结果;
28、该组参数对应的变换空间中功率谱切片上的轨迹跟踪结果即为目标线谱轨迹。
29、进一步的,所述多目标分辨方法使用如上述基于信号空间变换的线谱检测前跟踪方法所产生的目标检测、参数估计与轨迹跟踪的结果。
30、一种基于信号空间变换的线谱检测前跟踪系统,所述线谱检测前跟踪系统使用如所述基于信号空间变换的线谱检测前跟踪方法,所述线谱检测前跟踪系统具体为,
31、数据处理模块,对接收到的水听器阵列信号进行时空域处理,给出频率-方位角-时间三维空间上的目标辐射声信号功率谱输出表达式;
32、三维空间构建模块,将三维信号空间上的功率谱输出结果根据参数目标航向进行视在方位变换,获得频率-舷角的余弦值-时间三维空间上的目标辐射声信号功率谱输出结果;
33、功率谱切片获取模块:基于获得的三维空间上的目标辐射声信号功率谱输出结果,根据参数目标速度和发射信号频率获取功率谱切片;
34、隐马尔可夫hmm模型计算模块,基于获得的功率谱切片,建立隐马尔可夫hmm模型;利用维特比算法跟踪目标轨迹;将获取的功率谱切片上得到的跟踪目标轨迹点上的功率谱值进行累积;
35、代价函数模块,将累积的功率谱值构造为参数寻优算法中的代价函数;以得到的代价函数为判断准则,对寻优算法进行迭代计算直至收敛;
36、显示模块,根据代价函数模块的计算,给出目标检测、参数估计与轨迹跟踪的结果。
37、一种基于信号空间变换的多目标分辨系统,所述多目标分辨系统使用如所述基于信号空间变换的多目标分辨方法实现。
38、本发明的有益效果是:
39、本发明通过将信号空间变换后获取的切片上的轨迹能量累积值构造为粒子群参数优化算法中的代价函数,使得变换空间中切片搜索的复杂度降低,计算量大幅度下降。同时,在切片上建立隐马尔可夫模型,利用维特比算法跟踪轨迹,相比在切片上使用radon算法进行积分的方法,积分路径的选择更为准确,提高了处理增益。该方法提升了低信噪比下匀速运动目标的检测概率、跟踪准确性以及参数寻优的速度。还可以以搜索到的参数为目标的特征对目标进行区分,实现多目标分辨。
- 还没有人留言评论。精彩留言会获得点赞!