一种电机电磁-机械联合优化方法及系统
本发明属于电机优化设计领域,更具体地,涉及一种电机电磁-机械联合优化方法及系统。
背景技术:
1、永磁同步电机由于其较高的弱磁能力和较宽的高效运行区在电动汽车中有着广泛的应用。半无磁桥有中部连接筋的内置式永磁电机是一类特殊的高速电机,其结构如图1所示,其转子外侧无磁桥,有护套缠绕,转子内置式磁钢中部有连接筋;图1所示为典型的具有两层内置式转子磁钢的电机,其中,外层磁钢两侧有磁桥,内层磁钢两侧无磁桥。
2、在电机的设计阶段,往往需要同时考虑电机的电磁性能和机械性能,通常情况下,电机的电磁性能较为关键的参数为电磁转矩,机械性能较为关键的参数为转子应力。目前已有的分析方法中,主要包括有限元法和解析法。在有限元法中,通过建立电机定转子模型,设置电机转速、材料、绕阻等参数可进行电磁转矩的仿真计算;通过建立电机转子模型,设置电机转速、材料、接触等参数可进行转子应力的仿真计算。
3、有限元法计算精度比较高,但其需要进行多物理场的耦合计算,消耗大量的计算资料,效率较低,这无法适用于需要进行大量方案评估的场合以及电机电磁-机械联合优化的前期设计阶段。在解析方法中,通过建立转子的磁路模型,可进行例如空载反电势、dq轴电感及电磁转矩等参数的计算;通过分析转子各部分结构的受力变形,联立应力-应变方程可以求解转子磁桥和连接筋部分所受的应力。解析法效率较高,同时合理磁路模型的建立可使电磁转矩的解析计算达到较高的精度,但由于转子各部分之间非常复杂的变形与接触关系,转子应力的计算精度较低。相对于有限元法,解析法更加适合需要进行大量方案评估的场合以及电机电磁-机械联合优化的前期设计阶段。
4、解析法虽然效率较高,但现有的解析方法中,往往针对电磁性能和机械性能建立相互独立的解析模型,并分别设置参数独立进行优化,一方面,无法保证电机的综合性能最优,另一方面,电机设计的效率仍然收到了一定的限制。半无磁桥有中部连接筋的内置式永磁电机作为高速电机,其对转子强度有较高的要求,而由于其结构的特殊性,现有的解析方法所建立的转子应力解析模型并不能很好地描述其转子所受应力,其电磁性能也更为复杂,因此,现有的优化设计方法所存在的精度和效率问题半无磁桥有中部连接筋的内置式永磁电机的设计过程中更为突出。
技术实现思路
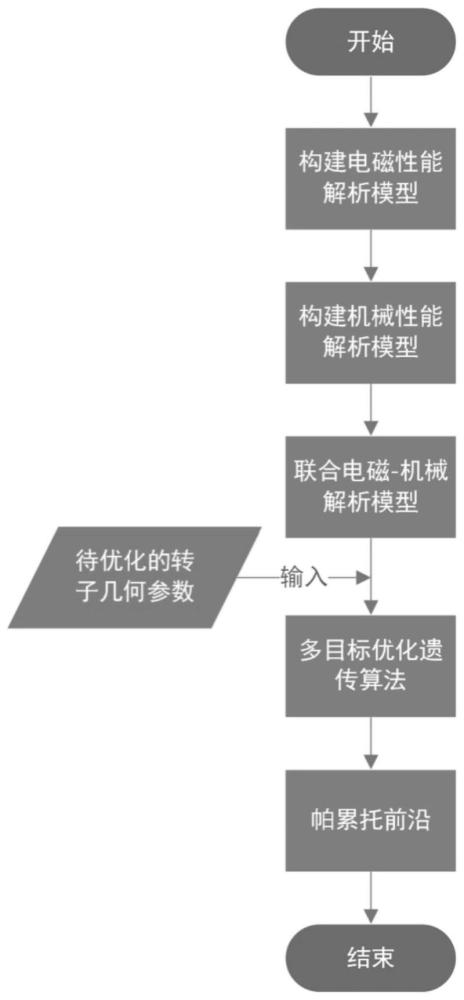
1、针对现有技术的缺陷和改进需求,本发明提供了一种电机电磁-机械联合优化方法及系统,其目的在于,针对半无磁桥有中部连接筋的内置式永磁电机建立准确的电磁性能解析模型和机械性能解析模型,并实现电磁性能和机械性能的联合优化,以提高半无磁桥有中部连接筋的内置式永磁电机的设计效率以及机械电磁的综合性能。
2、为实现上述目的,按照本发明的一个方面,提供了一种电机电磁-机械联合优化方法,电机为半无磁桥有中部连接筋的内置式永磁电机,电磁-机械联合优化方法包括:
3、建立电机的空载磁路模型,以求解用转子几何参数表示的电机的磁链基波幅值建立电机的电枢磁路模型,以求解用转子几何参数表示的电机的d轴电感ld以及q轴电感lq;利用磁链基波幅值d轴电感ld以及q轴电感lq计算电机的电磁转矩tem;
4、建立三个平衡方程,分别用于表示转子轭部和内层磁钢的离心力与护套对转子轭部的应力和内连接筋的拉力相平衡、两层磁钢间部分转子和外层磁钢的离心力与护套对转子轭部的应力和外连接筋的拉力相平衡以及内连接筋和外连接筋的总拉伸长度;联立三个平衡方程,求解得到用转子几何参数表示的外连接筋的拉伸长度urib2,计算相应的外连接筋所受应力σrib2后,按照σ′rib2=k21σrid2+k22对其进行修正,得到外连接筋所受应力σ′rib2;
5、以转子几何参数为待优化参数,以电磁转矩tem最大且外连接筋所受应力σ′rib2最小为优化目标,优化求解得到帕累托前沿,从帕累托前沿中选取电磁转矩和外连接筋所受应力满足预设要求的点作为目标点,并将目标点对应的转子几何参数作为电机优化后的转子几何参数;
6、其中,k21,k22为预先标定的补偿因子。
7、进一步地,所建立的三个平衡方程分别如下:
8、
9、
10、urib1+urib2=us-u0+uω
11、其中,mpm1和rpm1分别为内层磁钢的质量和质心半径,mpm2和rpm2分别为外层磁钢的质量和质心半径,mfe和rfe分别为极靴的质量和质心半径,mfe1和rfe1分别表示内层磁钢与外层磁钢间转子部分的质量和质心半径;ω为角速度,σ为旋转是护套对转子的径向应力,θ为极靴跨距半角度,lstk表示电机有效长度,r1表示护套内径;urib1和urib2分别表示内连接筋和外连接筋的拉伸长度,us为连接筋受应力产生的形变量,uω为护套旋转产生的形变量,u0为护套初始形变量;frib1和frib2分别表示内连接筋和外连接筋对转子的拉力,表达式分别为srib1和srib2分别为内连接筋和外连接筋与转子接触部分的面积,efe表示转子铁心的杨氏模量,lrib1和lrib2分别表示内连接筋和外连接筋的轴向长度。
12、进一步地,建立电机的空载磁路模型,包括:
13、(s1)按照如下方式将每一极对应的转子、气隙及定子进行区域划分:
14、将内层磁钢外层磁钢分隔所得的三个转子铁心区域分别作为第一转子区域、第二转子区域和第三转子区域;
15、将第一转子区域与第二转子区域间的空气磁障作为第一空气磁障,将第二转子区域与第三转子区域间的空气磁障作为第二空气磁障;
16、以内连接筋、外连接筋的中心连线作为原点,第一空气磁障与气隙的两个接触面的中点对应的角度分别记为α1和-α1,第二空气磁障与气隙的两个接触面的中点对应的角度分别记为α1+2α2和-α1-2α2,第三转子区域与气隙的两个接触面最外侧的点对应的角度分别记为α1+2α2+α3和-α1-2α2-α3;将[-α1,α1]范围内的气隙作为第一气隙区域,将(α1,α1+2α2]和[-α1-2α2,-α1)范围内的气隙作为第二气隙区域,将(α1+2α2,α1+2α2+α3]和[-α1-2α2-α3,-α1-2α2)范围内的气隙作为第三气隙区域;
17、(s2)按照如下方式建立空载磁路模型:
18、将定子铁心和三个转子区域等效为节点;
19、将第一气隙区域、第二气隙区域和第三气隙区域等效为磁阻,分别记为rg1、rg2和rg3;
20、将第一空气磁障和第二空气磁障等效为磁阻,分别记为rlbi和rlbo;
21、将内连接筋和外连接筋等效为磁通源,分别记为φribi和φrib0;
22、将内层磁钢等效为并联的磁通源φremi和磁阻rmi;
23、将外层磁钢等效为并联的磁通源φrem0和磁阻rmo;
24、其中,αl>0,α2>0,α3>0。
25、进一步地,计算磁阻rlbi和rlb0时,将第一空气磁障和第二空气磁障分别作为矩形,矩形长度和宽度为对应空气磁障的平均长度和平均宽度。
26、进一步地,求解用转子几何参数表示的电机的磁链基波幅值包括:
27、计算磁通源φremi和磁通源φribi并联等效而成的磁通源φ′remi,并计算磁通源φremo和磁通源φribo并联等效而成的磁通源φ′rem0;
28、计算磁阻rmi与磁阻rlbi并联等效而成的磁阻r′mi,并计算磁阻rmo与磁阻rlb0并联等效而成的磁阻r′mo;
29、建立如下方程组:
30、
31、求解上述方程组,得到第一气隙区域的磁通φgm1和第二气隙区域的磁通φgm2为:
32、
33、按照计算第一气隙区域和第二气隙区域的气隙磁密幅值bgm1和bgm2;
34、按照计算气隙磁密基波幅值
35、按照计算磁链基波幅值
36、其中,φσi表示等效磁阻r′mi的磁通,φσo表示等效磁阻r′mo的磁通;α0=(θ1+θ2)/2,θ1和θ2分别表示部分转子和护套的接触角度;n表示绕阻匝数,kw为基波绕阻系数,d表示气隙直径,p表示转子极对数,lstk表示电机有效长度。
37、进一步地,建立电机的电枢磁路模型,包括:
38、将各转子区域和各气隙磁障的各表面等效为节点,各节点对应的气隙等效为气隙磁导,各节点对应的气隙磁动势等效为磁动势源;其中:第一转子区域表面对应的磁位记为fr1,气隙磁导记为pgr1,磁动势源记为fsr1,角度范围为[-β1,β1];第二转子区域的两个表面对应的磁位均记为fr2,对应的气隙磁导均记为pgr2,对应的磁动势源均记为fsr1,角度范围分别为[-β3,-β2)和(β2,β3];第三转子区域的两个表面对应的气隙磁导均记为pgr3,磁动势源均记为fsr3,对应的角度范围分别为[-π/2p,-β4)和(β4,π/2p];第一空气磁障的两个表面对应的磁位分别记为fb1和fb3,对应的气隙磁导分别记为pgb1和pgb3,对应的磁动势源分别为fsb1和fsb3,角度范围分别为[-β2,-β1)和(β1,β2];第二空气磁障的两个表面对应的磁位分别记为fb2和fb4,对应的气隙磁导分别记为pgb2和pgb4,对应的磁动势源分别记为fsb2和fsb4,对应的角度范围分别为[-β4,-β3)和(β3,β4];
39、将第一空气磁障与相邻转子区域之间的磁导等效为电枢磁路模型中的磁导,分别记为pb1和pb3;
40、将第二空气磁障与相邻转子区域之间的磁导等效为电枢磁路模型中的磁导,分别记为pb2和pb4;
41、将第一空气磁障与第二空气磁障等效为磁阻,分别记为pr1和pr2。
42、进一步地,空气磁障等效而成的磁导pbi的计算方式如下:
43、
44、其中,i∈{1,2,3,4},pg+b表示磁导pbi所对应的空气磁障表面对应的极弧范围内δβ的磁导,其计算公式为:
45、
46、μ0为真空磁导率;θ′和θ″表示磁导pbi两侧转子区域与护套间的夹角,θ′<θ″;lstk表示电机有效长度,dr0为转子外侧直径,ge表示考虑了定子卡特系数后的等效气隙。
47、进一步地,求解用转子几何参数表示的电机的d轴电感ld以及q轴电感lq,包括:
48、以fs(θ,t)表示在任意时刻t,任意角度θ下的定子磁位,根据基尔霍夫电流定律和基尔霍夫电压定律列写如下方程组:
49、
50、求解上述方程组,得到各定子区域表面的磁位fr1和fr2,以及各空气磁障表面的磁位fb1、fb2、fb3、fb4,由此得到转子表面各位置处的磁位fr(θr,t);
51、根据b(θr,t)=(fs(θr,t)-fr(θr,t))μ0/ge计算得到气隙磁密b(θr,t);
52、按照如下公式计算a、b、c三相磁链ψma、ψmb、ψmc:
53、
54、
55、
56、将a、b、c三相磁链ψma、ψmb、ψmc以及三相电流转换到dq轴下,得到d、q轴主磁链ψmd和ψmq,以及d、q轴电流id和iq,按照和计算d、q轴主电感lmd和lmq;
57、按照计算漏电感后,按照ld=lmd+lsl和lq=lmq+lsl计算得到d轴电感ld以及q轴电感lq;
58、其中,m为电机相数,ns为每相串联匝数,z为电机槽数,psl为一个槽漏感的系数;na、nb和nc分别表示a、b、c三相绕组函数。
59、按照本发明的另一个方面,提供了一种电机电磁-机械联合优化系统,电机为半无磁桥有中部连接筋的内置式永磁电机,联合优化系统包括:
60、计算机可读存储介质,用于存储计算机程序;
61、以及处理器,用于读取计算机可读存储介质中存储的计算机程序,执行本发明提供的电机电磁-机械联合优化方法。
62、总体而言,通过本发明所构思的以上技术方案,基于以上分析可知,本发明基于电机的空载磁路模型和电枢磁路模型建立的电磁转矩解析模型和外连接筋所受应力的解析模型,紧密结合了半无磁桥有中部连接筋的内置式永磁电机的结构特点,全面地分析了电磁转矩以及外连接筋所受应力的影响因素,保证了解析模型的准确性,同时,两个解析模型的计算都涉及到了一些相同的转子几何参数,在此基础上,本发明将两个模型结合到一起,通过多目标优化的方式进行联合优化,能够保证电磁性能和机械性能综合最优,且优化效率大为提升。也即是说,本发明针对半无磁桥有中部连接筋的内置式永磁电机建立准确的电磁性能解析模型和机械性能解析模型,并将二者集成到一起建立多目标优化模型,实现了电磁性能和机械性能的联合优化,有效提高了半无磁桥有中部连接筋的内置式永磁电机的设计效率以及最终的综合性能。
- 还没有人留言评论。精彩留言会获得点赞!