一种基于深度学习的混凝土裂缝动态扩展实时监测方法
本发明涉及结构健康监测,特别涉及一种基于深度学习的混凝土裂缝动态扩展实时监测方法。
背景技术:
1、混凝土裂缝监测是结构健康监测的一个重要部分。对混凝土开裂初期和后期裂缝扩展进行实时监测具有重要意义,它不仅可以在混凝土裂缝扩展的初期及时提醒专业人员进行维护和补强,并且极大的降低维修成本,而且还可以降低事故的发生概率。
2、目前,已有研究人员提出了传统的接触式裂缝监测方法和基于深度学习与图像处理技术的非接触式监测方法。遗憾的是,接触式监测方法不仅需要提前估计裂缝可能发生的位置,而且监测设备的成本高且易老化损坏。而非接触式的监测方法首先利用深度学习或图像处理技术来识别所有的裂缝图像,然后利用图像处理技术将识别出的裂缝二值化掩码转换成裂缝参数或骨架线。最后,将当前时刻图像的裂缝参数或骨架线与上一帧图像进行比较,判断裂缝是否发生了扩展。然而,当仅裂缝宽度发生了扩展而裂缝长度(形状)未发生扩展时,基于裂缝骨架线形状上下文匹配的方法将失效。值得注意的是,由于图像处理算法的特性,这些方法在参数转换过程中耗时较长,无法实现实时监测。
3、此外,所有的图像,包括没有裂缝扩展的图像,都需要经过同样的处理,导致效率低下。换句话说,当前基于深度学习算法和图像处理技术的裂缝监测研究更多地集中在对某一特定时刻裂缝的识别上,对整个服役期内裂缝动态扩展的实时监测研究很少,而这是合理评估混凝土结构当前服役性能的重要依据。因此,寻找一种基于深度学习的混凝土裂缝动态扩展实时监测方法十分有必要。
技术实现思路
1、本发明提供了一种基于深度学习的混凝土裂缝动态扩展实时监测方法,以解决现有技术所存在的检测精度低、耗时长以及效率低下的技术问题。
2、为解决上述技术问题,本发明提供了如下技术方案:
3、一方面,本发明提供了一种基于深度学习的混凝土裂缝动态扩展实时监测方法,所述基于深度学习的混凝土裂缝动态扩展实时监测方法包括:
4、对yolov7网络模型进行改进优化,并将改进优化后的yolov7网络模型在预设的混凝土裂缝目标检测数据集中进行训练和验证,得到裂缝目标检测模型;
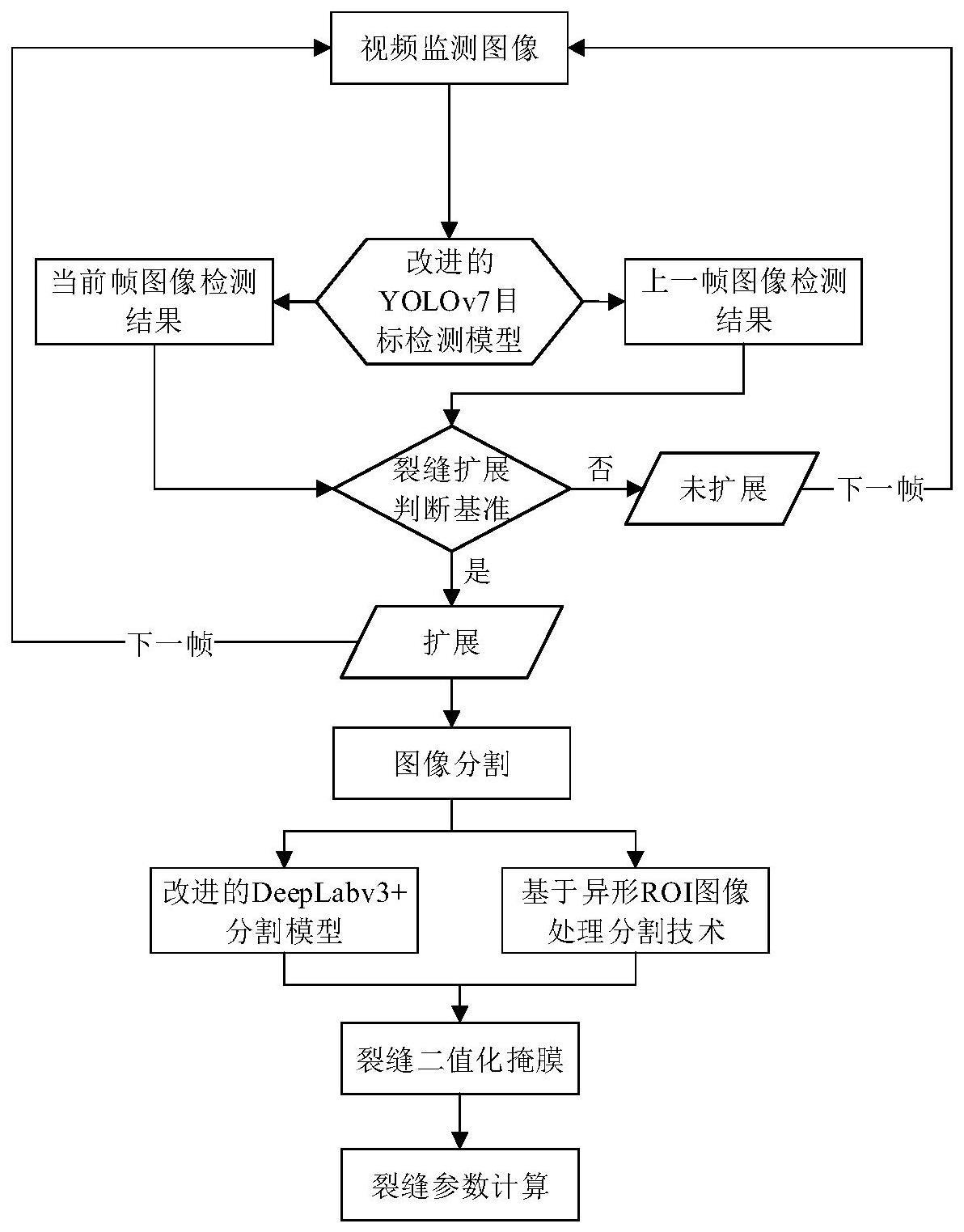
5、实时采集待监测的混凝土的图像,并将采集到的图像输入所述裂缝目标检测模型中,利用所述裂缝目标检测模型得到当前图像对应的裂缝目标检测结果;
6、基于预设的裂缝扩展判断基准,根据所述裂缝目标检测模型输出的相邻两帧图像对应的裂缝目标检测结果,判断当前时刻裂缝是否发生扩展;
7、当确定当前时刻裂缝发生扩展时,计算并输出裂缝参数的动态扩展变化值。
8、进一步地,所述对yolov7网络模型进行改进优化,包括:
9、在yolov7网络模型的第12层、63层和76层位置引入全局注意力机制。
10、进一步地,所述裂缝扩展判断基准包括:
11、若当前帧图像的裂缝目标预测矩形框与上一帧图像的裂缝目标预测矩形框的像素尺寸面积不一致,则判断当前时刻裂缝发生了扩展;
12、若当前帧图像的裂缝目标预测矩形框与上一帧图像的裂缝目标预测矩形框的像素尺寸面积的差异在预设范围内,则进一步通过计算当前帧图像与上一帧图像的矩形预测框内的图像的相似性,判断当前时刻裂缝是否发生了扩展。
13、进一步地,所述通过计算当前帧图像与上一帧图像的矩形预测框内的图像的相似性,判断当前时刻裂缝是否发生了扩展,包括:
14、分别统计当前帧图像和上一帧图像中矩形预测框内的图像像素灰度值;分别绘制出当前帧图像和上一帧图像所对应的直方图;
15、对两帧图像中矩形预测框内的图像像素灰度值分别进行归一化处理,公式为:
16、
17、其中,dst(i,j)表示归一化后的灰度值;src(i,j)表示原始图像的单个灰度值;src(x,y)表示原始图像中全部的灰度值;max表示归一化范围的上限,min表示归一化范围的下限;
18、基于归一化处理后的图像像素灰度值,计算当前帧图像与上一帧图像的矩形预测框内的图像的相似性,公式为:
19、
20、其中,d(h1,h2)表示当前帧图像与上一帧图像的矩形预测框内的图像的相似性计算值;h1(i)和h2(i)分别表示两帧图像的直方图,和分别表示两帧图像的直方图的均值;i表示遍历图像中所有像素或灰度级别的索引;
21、当相似性计算值小于1时,则判断当前时刻裂缝发生了扩展。
22、进一步地,所述计算并输出裂缝参数的动态扩展变化值,包括:
23、根据裂缝大小,利用改进优化的deeplabv3+分割模型或者基于异形roi的图像分割算法,对提取的裂缝图像进行分割,得到裂缝二值化掩膜;
24、通过预设的裂缝参数量化算法对生成的裂缝二值化掩膜进行参数计算,并输出裂缝参数的动态扩展变化值。
25、进一步地,所述根据裂缝大小,利用改进优化的deeplabv3+分割模型或者基于异形roi的图像分割算法,对提取的裂缝图像进行分割,包括:
26、根据裂缝宽度,将裂缝分为宽裂缝部分和细裂缝部分;采用基于异形roi的图像分割算法对裂缝图像中的细裂缝部分进行分割,并对裂缝图像中的宽裂缝部分使用改进优化的deeplabv3+分割模型进行分割。
27、进一步地,所述改进优化的deeplabv3+分割模型是在deeplabv3+模型的解码部分引入一种注意力机制。
28、进一步地,所述基于异形roi的图像分割算法的分割流程包括:
29、针对裂缝目标检测模型输出的裂缝目标预测矩形框,采用多边形闭合框选方法对矩形框内的裂缝区域进行框选;
30、对框选后的图像进行中值滤波和自适应阈值处理,得到裂缝图像二值化掩膜;
31、对得到的裂缝图像二值化掩膜进行连通域分析,以获取所有连通域的数量和面积;其中,连通域分析是指在图像中寻找彼此独立的连通域并标记它们;当裂缝图像二值化掩膜中连通域数量超过1条时,则当前二值化掩膜存在噪声;应删除面积小于预设阈值的连通域,只保留面积最大的连通域,即为真实裂缝。
32、进一步地,所述裂缝参数量化算法为基于微元法的裂缝参数计算方法、基于中心线的裂缝宽度法以及局部平均裂缝宽度法中的任意一种。
33、进一步地,所述裂缝参数包括裂缝长度、裂缝宽度以及裂缝角度。
34、再一方面,本发明还提供了一种电子设备,其包括处理器和存储器;其中,存储器中存储有至少一条指令,所述指令由处理器加载并执行以实现上述方法。
35、又一方面,本发明还提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述指令由处理器加载并执行以实现上述方法。
36、本发明提供的技术方案带来的有益效果至少包括:
37、本发明提供的混凝土裂缝动态扩展实时监测方法,将裂缝目标检测算法与裂缝动态扩展基准方法相结合,实现了裂缝动态扩展的实时自动监测。通过采用基于深度学习和图像处理技术的图像分割算法以及裂缝参数计算方法,能够实现更高效、更高精度的裂缝动态扩展程度的量化。从而能够对混凝土结构新产生的裂缝损伤进行实时识别,以及对既有裂缝的动态扩展进行实时监测。
- 还没有人留言评论。精彩留言会获得点赞!