基于有限元引导深度学习代理模型评估桥梁运行状态方法与流程
本技术涉及评估桥梁运行结构状态方法,尤其涉及基于有限元引导深度学习代理模型评估桥梁运行状态方法,属于桥梁结构在线仿真。
背景技术:
1、我国桥梁保有量越来越大,交通流量也一直在增大,对于桥梁的运维监管日益变得重要。如何保证桥梁的运行安全是未来需要研究和探索的领域。其实不单单是桥梁,包括其他交通设施都面临着这样的问题,比如隧道,边坡等等。桥梁设施在运营期的安全监测是一个很重要的领域,最近几年该领域也有了一定的发展,但是目前技术还停留在对监测阈值的报警和趋势分析的程度。另外,桥梁在运营期的仿真模型,也只是在监测方案设计阶段建立,只能做到对单一现状的模拟仿真。如何实现桥梁结构实时在线仿真是一个重点研究的方向。
2、有研究人员提出了一种基于深度学习的优化有限元迭代过程方法及装置,cn114021414b;该方法对利用深度学习算法实现迭代中下一步状态点的预测,减少迭代步数,保证模拟结果准确性的基础上优化有限元模型的计算效率和收敛性,具有较高的通用性,但该方法基于数据驱动的深度学习网络,需要人工准备大量的数据对模型进行训练,花费大量的时间;没有对数据的输入和数据关系的理解,训练出模型的可靠性较差,而且没有对桥梁在运营期的运行结构状态进行评估。
技术实现思路
1、在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
2、鉴于此,为解决现有技术中存在的技术问题,本发明提供基于有限元引导深度学习代理模型评估桥梁运行状态方法。本发明与纯数据驱动的神经网络学习相比,pinn在训练过程中施加了物理信息约束,因而能用更少的数据样本学习到更具泛化能力的模型;与传统深度学习相比,基于有限元引导的神经网络可以通过物理引导自主完成模型的训练;能够解决有限元模型仿真耗时,仿真效率不高的问题,实现对桥梁的实时仿真模拟,而从评估桥梁运行结构状态。
3、方案一、基于有限元引导深度学习代理模型评估桥梁运行状态方法,包括以下步骤:
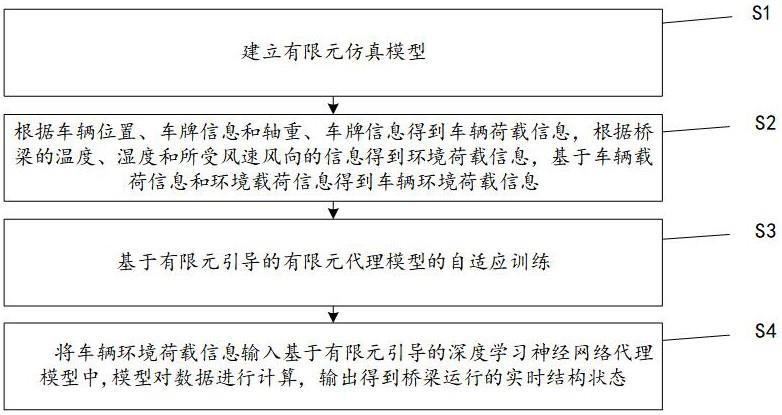
4、s1.建立有限元仿真模型;
5、s2.根据车辆位置、车牌信息和轴重、车牌信息得到车辆荷载信息,根据桥梁的温度、湿度和所受风速风向的信息得到环境荷载信息,基于车辆载荷信息和环境载荷信息得到车辆环境荷载信息;
6、s3.基于有限元引导的有限元代理模型的自适应训练;
7、s4.将车辆环境荷载信息输入基于有限元引导的深度学习神经网络代理模型中,模型对数据进行计算,输出得到桥梁运行的实时结构状态。
8、优选的,建立有限元仿真模型的方法是:
9、s11.获取桥梁设计图上的桥梁结构尺寸及材料类型参数;
10、s12.通过有限元方法,建立包含结构几何、材料信息的桥梁有限元模型;
11、;
12、其中,u为结构响应位移参数,e为结构弹性模量,i为截面极惯性矩参数,b为形函数的二次导数,n为形函数,x为结构纵向位置参数,l为桥梁结构纵向的长度。
13、优选的,根据车辆位置、车牌信息和轴重、车牌信息得到车辆荷载信息,根据桥梁的温度、湿度和所受风速风向的信息得到环境荷载信息,基于车辆载荷信息和环境载荷信息得到车辆环境荷载信息的方法是:
14、s21.车辆位置、车牌信息获取;
15、s22.轴重、车牌信息获取;
16、s23.通过标注信息得到每辆车的车牌、轴重、位置信息及时间信息,共同构建通过桥面的车辆随时间进程的轴重位置分布信息,作为车辆荷载信息;
17、s24.利用前端的温湿度、风速风向传感器实时采集桥梁的环境荷载信息,包括桥梁的温度、湿度和所受风速风向的信息,共同构建桥梁所受随时间变化的环境荷载信息,作为环境荷载信息;
18、s25.将车辆荷载信息和环境荷载信息通过两者所包含的时间信息进行匹配,作为车辆环境荷载信息。
19、优选的,车辆位置、车牌信息获取的方法包括以下步骤:
20、s211.在桥梁上布设视频采集设备,覆盖桥面上所有车道的视频信息采集;
21、s212.视频采集设备采集每一帧视频图像,利用目标识别深度学习算法,实时识别桥上的车辆车牌和车型信息,车牌信息作为车辆标注信息;
22、s213.在采集区域内依据车道方向和车道法线方向分为纵向位置和横向位置,分别用x和y来表示,构建车道坐标系;
23、s214.在视频图像中横向位置和竖向位置用ox和oy表示,构建图像坐标系;
24、s215.将车道坐标系和图像坐标系通过摄像头与车道的位置关系,利用空间坐标转换方程进行转换:
25、;
26、s216.出现在视频采集区域内的车辆,依据车头中心的位置确定车辆在图片中的位置,得到车辆在车道坐标系中的位置,即实际位置信息,同时获取摄像头采集到每一帧图像的时间信息,每辆车的位置和时间信息通过车牌区分。
27、优选的,轴重、车牌信息获取的方法是:在桥梁前端位置每一条车道上铺设车道级动态称重系统;利用动态称重系统中的摄像头和称重设备采集得到的车辆的车牌和轴重信息,车牌作为标注信息,每辆车的轴重信息通过车牌进行区分。
28、优选的,基于有限元引导的有限元代理模型的自适应训练的方法,包括以下步骤:
29、s31.初始化模型参数:依据模型输入变量的数量、桥梁有限元模型的规模和输出变量的数量需求定义深度学习神经网络的网络结构,包括输入输出神经元的数量、神经网络层数量和每一层的神经元数量;
30、s32.数据集构建:将采集到的一天的车辆环境荷载信息数据作为数据集a输入模型;将采集到的十天的车辆环境荷载信息数据作为数据集b输入模型;将采集到的三天的车辆环境荷载信息数据的数据结构打乱,作为测试集a输入模型;
31、s33.定义损失函数:
32、增加有限元域的损失函数:
33、;
34、基于数据的损失函数:
35、;
36、基于势能的损失函数如下:
37、;
38、s34.使用二阶优化方法中的拟牛顿法定义优化算法;
39、s35.模型迭代训练:将数据集a和数据集b分别输入到和两部分损失函数中进行自适应迭代训练,使损失值到达低于容许值,设定容许值为0.00001,达到容许值后自动停止训练,并输出基于有限元引导的深度学习神经网络代理模型;
40、s36.将测试集a数据输入中训练得到的基于有限元引导的深度学习神经网络代理模型,对基于有限元引导的深度学习神经网络代理模型准确率进行评估,评估的方式是人为对部分数据进行核对,当核对数据达到模拟精度的99.5%时,模型训练成功,否则回到s35对模型进行重新迭代训练,其中容许值将下调10%,直到满足精度要求。
41、优选的,将车辆环境荷载信息输入基于有限元引导的深度学习神经网络代理模型中,模型对数据进行计算,输出得到桥梁运行的实时结构状态的方法,包括以下步骤:
42、s41.将车辆环境荷载信息输入到基于有限元引导的深度学习神经网络代理模型中进行计算,即利用训练好的神经元进行叠加计算,计算输出参数,输出参数为桥梁结构的响应参数,响应参数包含桥梁关键位置的挠度、应力和应变参数;
43、s42.获取桥梁结构响应参数最大挠度ω;
44、依据桥梁设计规范中对挠度限制值的规定进行计算,如下:
45、;
46、其中,表示扰度限制值,表示挠度长期增长系数,表示桥梁的结构长度;
47、依据桥梁最大挠度与挠度限制值的比评估桥梁状态:
48、;
49、其中,表示桥状态值,当介于0.5-0.8时,桥梁状态为安全状态,当介于0.8-1.0之间时,桥梁为危险临近状态,当大于1时,桥梁状态为危险状态。
50、方案二、一种电子设备,包括存储器和处理器,存储器存储有计算机程序,所述的处理器执行所述计算机程序时实现方案一所述的基于有限元引导深度学习代理模型评估桥梁运行状态方法的步骤。
51、方案三、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现方案一所述的基于有限元引导深度学习代理模型评估桥梁运行状态方法。
52、本发明的有益效果如下:本发明建立的基于有限元引导的深度学习代理模型,实现桥梁状态在实际环境及车辆荷载下的实时在线仿真,仿真速度可以达到毫秒级,真正实现对桥梁状态实时的诊断。
- 还没有人留言评论。精彩留言会获得点赞!