一种基于YOLOv5改进的路面垃圾实时检测方法
本发明涉及垃圾检测,具体地,涉及一种基于yolov5改进的路面垃圾实时检测方法。
背景技术:
1、随着城市建设信息化、智能化发展,政府环卫投入力度加强,环卫车的产量逐年上升。在这些环卫车上,智能化垃圾检测技术被广泛应用,使得城市环卫工作效率得到提升。然而,路面场景中的垃圾检测是一个极具挑战性的工作,因为垃圾目标形状多变,破损、变形、尺寸不一,并且存在路面背景条件的干扰。为了解决这些问题,本研究提出了一种高效实时的清扫路面垃圾检测方法,该方法能够有效地识别路面上常见的垃圾,为城市环卫工作提供了智能化、高效化的技术支持。
2、目标检测技术是计算机视觉中的重要技术之一,主要用于检测图像或视频中的特定目标。传统的垃圾分类方法主要依靠人工进行分类,效率低下且易受主观因素影响。近年来,随着深度学习技术的发展,基于深度学习的垃圾分类算法也得到了广泛的研究和应用。基于深度学习的目标检测算法主要包括r-cnn、fast r-cnn、faster r-cnn、yolo等。其中,yolo系列算法因其速度快、准确率高等特点,在目标检测领域得到了广泛的应用[1]。yolov5是一种基于深度学习的目标检测算法,由美国加州大学伯克利分校研究团队于2020年5月发布。与之前的版本yolov4相比,yolov5在速度和准确性上都有了大幅提升。在路面垃圾检测中,yolov5可以通过训练模型来识别不同类型的垃圾,例如瓶子、纸张、塑料袋等。在模型训练时,需要收集足够数量的包含垃圾的图像,并使用yolov5算法进行标注和训练。随着训练的进行,模型的准确性和鲁棒性会逐渐提高,从而可以在实际的路面垃圾检测中得到应用。
3、而申请号为202210800590.0的中国发明申请:《一种基于yolov5的神经网络模型的垃圾检测方法》,其技术方案具体为:包括基于yolov5神经网络构建垃圾检测模型,其中,所述垃圾检测模型包括input模块、backbone网络模块、neck网络模块和output模块;采集垃圾图像;将所述垃圾图像输入所述input模块进行预处理;预处理后的所述垃圾图像通过所述backbone网络模块进行切片处理,获取特征图;基于所述特征图,通过所述neck网络模块进行采样融合,获取待预测特征图;将所述待预测特征图输入所述output模块进行输出,获取所述垃圾图像的检测信息。该方案并没有对训练数据集的构建以及yolov5神经网络进行优化,目标检测网络的性能和准确性还有待提升。
技术实现思路
1、为解决现有技术垃圾目标检测存在缺乏样本多样性、计算量较大、识别准确度有待提高的技术问题,本发明提供了一种基于yolov5改进的路面垃圾实时检测方法,本发明采用的技术方案是:
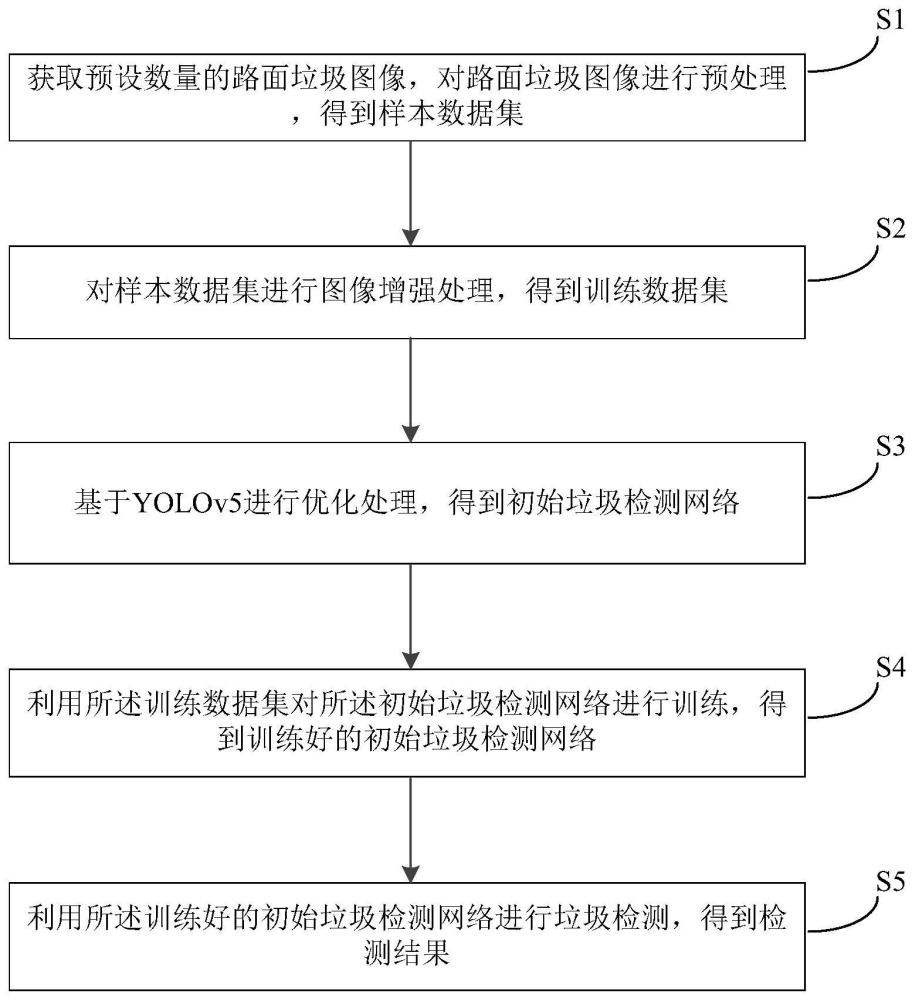
2、一种基于yolov5改进的路面垃圾实时检测方法,包括以下步骤:
3、s1,获取预设数量的路面垃圾图像,对路面垃圾图像进行预处理,得到样本数据集;
4、s2,对样本数据集进行图像增强处理,得到训练数据集;
5、s3,基于yolov5进行优化处理,得到初始垃圾检测网络;
6、s4,利用所述训练数据集对所述初始垃圾检测网络进行训练,得到训练好的初始垃圾检测网络;
7、s5,利用所述训练好的初始垃圾检测网络进行垃圾检测,得到检测结果。
8、作为一种优选方案,在步骤s1中,获取预设数量的路面垃圾图像,对路面垃圾图像进行预处理,得到样本数据集的具体方法包括:
9、s11,获取预设数量的路面垃圾图像;
10、s12,记录路面垃圾图像一组对角点上的坐标,作为路面垃圾图像的标签;
11、s13,将路面垃圾图像进行归一化,得到样本数据集。
12、作为一种优选方案,在步骤s2中,所述图像增强处理包括高斯噪声处理、图像明暗度处理、图像旋转处理、图像裁剪处理、图像平移处理、mosaic增强处理以及局部风格迁移样本扩充处理。
13、作为一种优选方案,所述高斯噪声处理的方法具体为:
14、将高斯噪声加入路面垃圾图像中,并改变不同的信噪比以增加图像的数据量,对应的表达式为:
15、s(o)=s(i)+n(θ)
16、其中,s(o)为处理后图像,s(i)为原始图像,n(θ)为噪声,θ为噪声参数。
17、作为一种优选方案,所述图像明暗度处理的方法具体为:
18、以random函数调用uniform于预设的数值范围内生成随机数,以预设值为分界线,大于预设值则调暗,小于预设值则调亮,将路面垃圾图像进行亮度值变换,对应的表达式为:
19、s(o)=f(s(i))
20、其中,s(o)为处理后图像,s(i)为原始图像,f(•)为亮度变化函数。
21、作为一种优选方案,所述图像旋转处理具体为:
22、将路面垃圾图像进行按照若干个不同的角度进行旋转,得到对应的若干个图像,对应的表达式如下:
23、i′=icosθ-jsinθ
24、j′=i sinθ+j cosθ
25、s(o)=r(s(i))
26、其中,(i,j)是原图像f(i,j)中像素点坐标;(i′,j′)是对应像素点(i,j)经过旋转变换后的图像g(i′,j′)的坐标,式中r(·)为旋转变化函数。
27、作为一种优选方案,所述mosaic增强处理的方法具体为:
28、将一张选定的路面垃圾图像和随机的3张路面垃圾图像进行随机裁剪,再拼接到一张图上作为新的图像,对应的表达式为:
29、s(o)=m(s(i))
30、其中,m(·)为mosaic增强变化函数,s(o)为处理后图像,s(i)为原始图像。
31、作为一种优选方案,所述局部风格迁移样本扩充处理的具体方法为:
32、对路面垃圾图像中的目标垃圾进行渲染,然后嵌入到无垃圾的纯路面背景图像之中进行图像融合处理,得到融合图像;
33、将所述融合图像输入到vgg网络中,使用损失函数ltotal产生损失,再将误差传递到输入层,输入层根据误差进行迭代;
34、经过多次迭代,可以得到需要的风格和内容。
35、作为一种优选方案,所述损失函数ltotal的表达式如下:
36、ltotal=lc+ls+whlh+wtvltv+w1l1
37、其中,其中,lc是内容损失,ls是风格损失,lh为直方图损失,ltv为全变分损失;
38、所述内容损失lc、风格损失ls、直方图损失lh、变分损失ltv表示如下:
39、
40、
41、
42、
43、其中lc是内容损失,ls是风格损失,lh为直方图损失,ltv为全变分损失,l1为生成图像s和原背景图像o之间计算的损失,参考图像h垃圾目标区域各通道的直方图信息gh,f表示frobenius范数,o∈o[m],h∈h[m],同时,采取与训练的vgg网络φ提取高级特征表示进行损失计算,φ(·)为l层图像特征表达;h∈h[m],r表示直方图匹配计算。
44、作为一种优选方案,在步骤s3中,所述yolov5包括input输入层、backbone网络层、neck层、prediction预测结果输出层,所述优化处理具体方法为:
45、在yolov5中的backbone网络层的每一个c3模块加入自改进gam_att注意力机制,所述自改进gam_att注意力机制将通道和空间注意力机制相结合,并将c3模块中的卷积层替换为5*5conv;
46、在yolov5中引入a-eiou损失函数,通过调节alpha因子的值,控制不同损失项的相对重要性,以此调整分类损失和回归损失的权重。
47、相较于现有技术,本发明所具有的有益效果是:
48、本发明通过局部风格迁移样本扩充等图像增强处理方法,实现扩充样本多样性、提升模型预测精度的目的;在backbone网络层引入自改进gam_att_c3注意力机制,自适应地调整特征的权重,更加准确地关注重要的特征区域,在大幅提升目标检测的精度和鲁棒性的同时,有效地减少了计算量;通过引入了a-eiou的损失函数,提升网络对于正负样本的区分能力,改善模型在较小重叠度的样本上的体现,平衡不同损失项之间的重要性。
- 还没有人留言评论。精彩留言会获得点赞!