数字外后视镜系统的控制方法、装置、设备及介质与流程
本发明涉及车辆控制,尤其涉及一种数字外后视镜系统的控制方法、装置、设备及介质。
背景技术:
1、越来越多的车辆采用数字外后视镜替代传统的机械式外后视镜,数字外后视镜主要包括摄像头和监视器。
2、车辆在雨水天气或湿度比较大的环境中行驶时,摄像头的镜头上很容易有水,导致监视器中显示的画面不清楚,造成驾驶员对后方的情况判定不准确,从而导致交通事故。因此,在车辆行驶期间,如何判断摄像头镜头上有水是目前亟待解决的技术问题。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种解决上述问题的数字外后视镜系统的控制方法、装置、设备及介质,可以通过摄像头拍摄的图像的亮度和像素方差值,判断出摄像头的镜头上是否有水,若有水可以去除镜头上的水,使得监视器显示的画面变清楚,从而降低交通事故发生的风险。
2、第一方面,本发明提供了一种数字外后视镜系统的控制方法,所述控制方法包括:
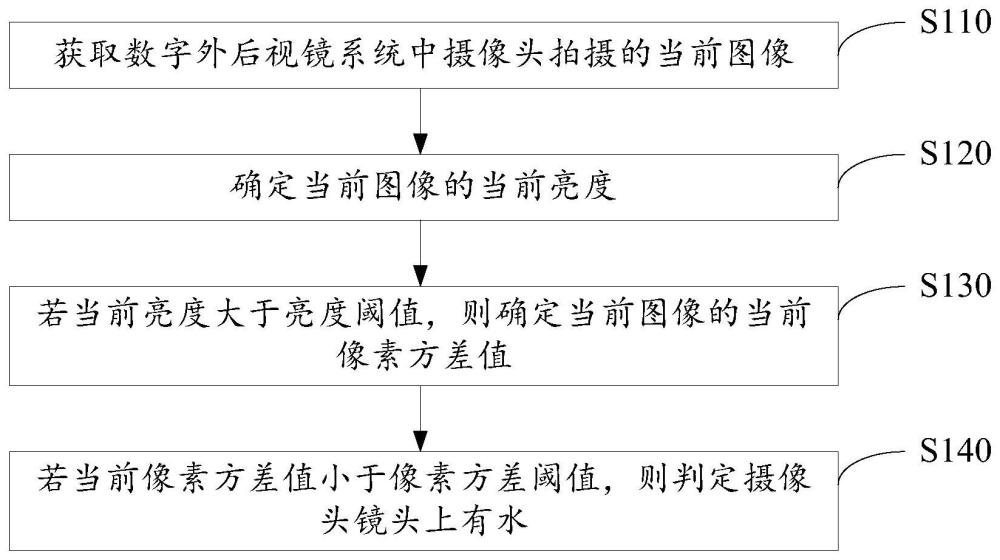
3、获取数字外后视镜系统中摄像头拍摄的当前图像;
4、确定所述当前图像的当前亮度;
5、若所述当前亮度大于亮度阈值,则确定所述当前图像的当前像素方差值;
6、若所述当前像素方差值小于像素方差阈值,则判定所述摄像头镜头上有水。
7、可选的,所述数字外后视镜系统还包括布置在所述摄像头上的除水机构,所述判定所述摄像头镜头上有水后,所述控制方法还包括:
8、控制所述除水机构进行除水操作,以除掉所述摄像头镜头上的水。
9、可选的,所述除水机构安装在所述摄像头的外壳内,所述控制所述除水机构进行除水操作,包括:
10、控制所述除水机构带动所述外壳以设定频率进行振动。
11、可选的,所述确定所述当前图像的当前亮度,包括:
12、获取所述当前图像中红色、蓝色和绿色三个颜色通道的rgb值;
13、计算所述rgb值的平均值,得到所述当前图像的所述当前亮度。
14、可选的,所述控制方法还包括:
15、获取所述摄像头拍摄的车辆行驶在不同场景和不同工况下的第一试验图像,所述场景至少包括白天和晚上,所述工况至少包括高速工况、低速工况和静止工况;
16、确定所述第一试验图像中不模糊图像的第一试验亮度,所述第一试验图像中模糊图像的第二试验亮度;
17、若所述第一试验亮度中的最小值大于所述第二试验亮度中的最大值,则将所述第一试验亮度中的所述最小值确定为所述亮度阈值;
18、若所述第一试验亮度中的所述最小值不大于所述第二试验亮度中的所述最大值,则将所述第二试验亮度中的所述最大值确定为所述亮度阈值。
19、可选的,所述控制方法还包括:
20、获取所述摄像头在所述镜头上有水时,拍摄的车辆行驶在不同场景和不同工况下的第二试验图像,所述场景至少包括白天和晚上,所述工况至少包括高速工况、低速工况和静止工况;
21、确定所述第二试验图像的第三试验亮度;
22、确定所述第三试验亮度大于所述亮度阈值的所述第二试验图像的试验像素方差值;
23、将所述试验像素方差值中的最小值确定为所述像素方差阈值。
24、可选的,在所述外壳振动期间,获取所述外壳的倾斜角度;
25、根据所述倾斜角度,在所述摄像头拍摄的所述当前图像上确定对应的图像截取区域的位置,不同的所述倾斜角度对应不同的所述位置;
26、将从所述图像截取区域截取的图像显示在所述监视器上。
27、第二方面,本发明提供了一种数字外后视镜系统的控制装置,所述控制装置包括:
28、图像获取模块,用于获取数字外后视镜系统中摄像头拍摄的当前图像;
29、亮度确定模块,用于确定所述当前图像的当前亮度;
30、方差值确定模块,用于若所述当前亮度大于亮度阈值,则确定所述当前图像的当前像素方差值;
31、有水判定模块,用于若所述当前像素方差值小于像素方差阈值,则判定所述摄像头镜头上有水。
32、可选的,所述数字外后视镜系统还包括布置在所述摄像头上的除水机构,所述判定所述摄像头镜头上有水后,所述控制装置还包括:
33、除水控制模块,用于控制所述除水机构进行除水操作,以除掉所述摄像头镜头上的水。
34、可选的,所述除水机构安装在所述摄像头的外壳内,除水控制模块还用于:
35、控制所述除水机构带动所述外壳以设定频率进行振动。
36、可选的,所述除水机构包括雨刮刷,除水控制模块还用于:
37、控制所述雨刮刷在所述摄像头的所述镜头上摆动。
38、可选的,亮度确定模块还用于:
39、获取所述当前图像中红色、蓝色和绿色三个颜色通道的rgb值;
40、计算所述rgb值的平均值,得到所述当前图像的所述当前亮度。
41、可选的,控制装置还包括亮度阈值确定模块,用于:
42、获取所述摄像头拍摄的车辆行驶在不同场景和不同工况下的第一试验图像,所述场景至少包括白天和晚上,所述工况至少包括高速工况、低速工况和静止工况;
43、确定所述第一试验图像中不模糊图像的第一试验亮度,所述第一试验图像中模糊图像的第二试验亮度;
44、若所述第一试验亮度中的最小值大于所述第二试验亮度中的最大值,则将所述第一试验亮度中的所述最小值确定为所述亮度阈值;
45、若所述第一试验亮度中的所述最小值不大于所述第二试验亮度中的所述最大值,则将所述第二试验亮度中的所述最大值确定为所述亮度阈值。
46、可选的,控制装置还包括方差阈值确定模块,用于:
47、获取所述摄像头在所述镜头上有水时,拍摄的车辆行驶在不同场景和不同工况下的第二试验图像,所述场景至少包括白天和晚上,所述工况至少包括高速工况、低速工况和静止工况;
48、确定所述第二试验图像的第三试验亮度;
49、确定所述第三试验亮度大于所述亮度阈值的所述第二试验图像的试验像素方差值;
50、将所述试验像素方差值中的最小值确定为所述像素方差阈值。
51、可选的,所述数字外后视镜系统还包括监视器,控制装置还包括位置确定模块,用于:
52、在所述外壳振动期间,获取所述外壳的倾斜角度;
53、根据所述倾斜角度,在所述摄像头拍摄的所述当前图像上确定对应的图像截取区域的位置,不同的所述倾斜角度对应不同的所述位置;
54、将从所述图像截取区域截取的图像显示在所述监视器上。
55、第三方面,本发明提供了一种电子设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行如第一方面所述的控制方法。
56、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行如第一方面所述的控制方法。
57、本发明实施例中提供的技术方案,至少具有如下技术效果或优点:
58、本发明实施例提供的一种数字外后视镜系统的控制方法、装置、设备及介质,通过获取数字外后视镜系统中摄像头拍摄的当前图像;确定当前图像的当前亮度,通过亮度反映当前图像是否模糊;若当前亮度大于亮度阈值,则说明当前图像较模糊,需要进一步确定当前图像的当前像素方差值;若当前像素方差值小于像素方差阈值,则说明摄像头镜头上有水,即判定摄像头镜头上有水。该方法可以通过摄像头拍摄的图像的亮度和像素方差值,判断出摄像头的镜头上是否有水,若判断有水则去除镜头上的水,使得监视器显示的画面变清楚,从而降低交通事故发生的风险。
59、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!