一种水下多基地声纳系统的空间阵位优化方法及系统与流程
本发明涉及水下通信,尤其涉及一种水下多基地声纳系统的空间阵位优化方法及系统。
背景技术:
1、随着海洋信息技术与应用需求的不断提升,多基地声呐系统由于具备主被动声呐的性能优势而得到更为广泛的应用。多基地声呐的空间阵位结构是影响系统整体性能的关键因素,在不增加基地平台的基础上,面对不同的布阵场景与需求,如何优化设计多基地声呐系统的布阵结构至关重要。
2、水声目标探测定位技术是环境侦察、监测跟踪、资源发掘、深海勘探等海洋应用领域的关键技术之一。近年来,随着海洋信息技术的大力发展,目标探测定位技术正面临着新的严峻考验。如目标辐射噪声与回波强度大幅度降低,海洋环境的噪声却逐年递增。这就导致以往单平台、非协作式的探测定位技术需要向着多维互通、空间共享、信息资源互补的多平台协作技术转变。多基地声呐系统作为一种重要的多平台协作模式,由于具备更远探测距离,更强的定位、对抗与反潜侦察能力而被广泛应用。
3、通常由一个发射站(或多个)和多个分开布放的接收站组成的协作系统称为多基地系统。而在多基地声呐系统中各个站点是由不同的声呐节点配置而成。一般而言,发射站配备为收发合置的主动声呐,具备接收目标回波信号的能力。而分散的接收站点则配备被动声呐,只能接收目标回波。这种节点分置的配置策略使其能够同时具备主/被动声呐的性能优势,在保证自身隐秘性的同时,还能进一步提高探测定位能力,因而具有广阔的应用前景。
4、中国专利cn113820715b公开了一种采用阵元级多基地数据融合的目标定位方法,其根据基地总数和阵元间距估计一个区域范围,并进行阵元级数据融合,构建多基地导向矢量,使用空间谱估计算法完成目标定位。
5、但是,上述技术方案无法对水下多基地声纳系统的布放位置进行优化,不能保证水下声纳覆盖范围的最大化,易出现声纳系统的覆盖范围重叠,造成声纳资源浪费。
6、因此,寻找一种能够保证水下多基地声纳系统的最大覆盖范围,同时提升声纳系统整体定位精度的空间优化方法,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本发明提出了一种水下多基地声呐系统的空间阵位优化方法,其通过对位置坐标模型的不断迭代优化,可以逐步减小误差,提高水下多基地声纳系统的定位精度,并结合蒙特卡洛法和k/n融合准则,提高水下多基地声纳系统的性能。
2、本发明的技术方案是这样实现的:
3、第一方面,本发明提供了一种水下多基地声纳系统的空间阵位优化方法,包括以下步骤:
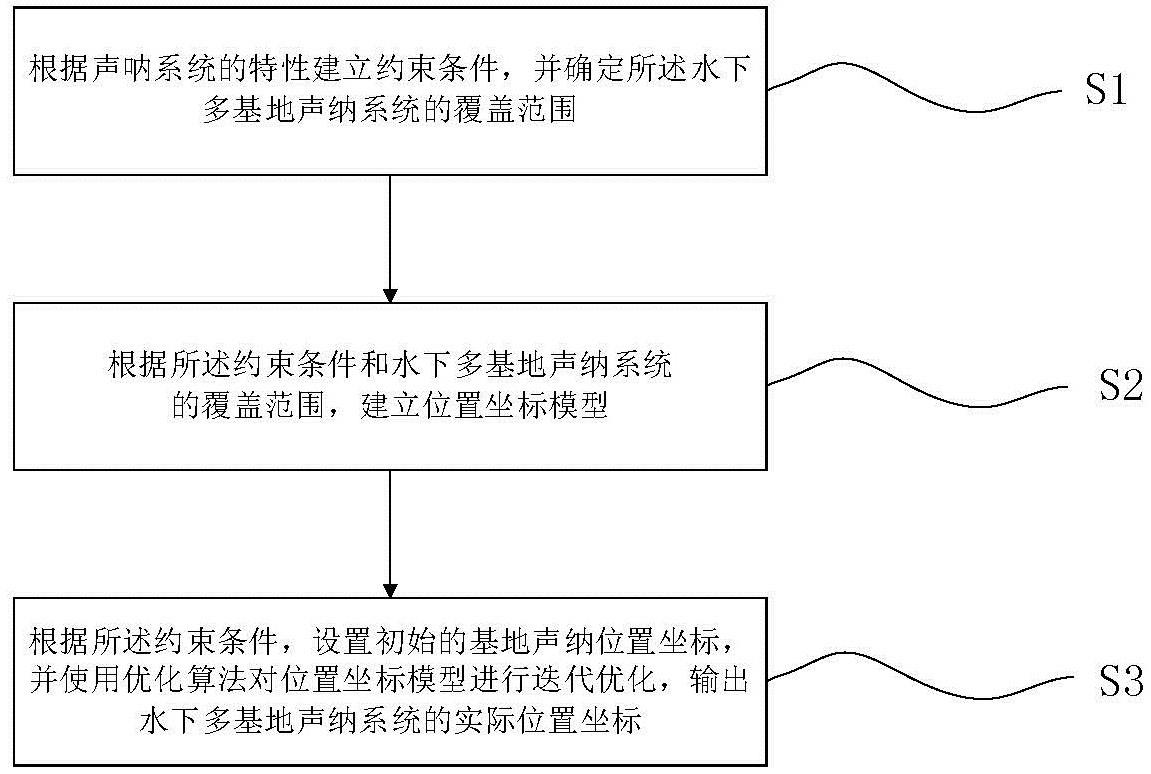
4、s1、根据声呐系统的特性建立约束条件,并确定所述水下多基地声纳系统的覆盖范围;
5、s2、根据所述约束条件和水下多基地声纳系统的覆盖范围,建立位置坐标模型;
6、s3、根据所述约束条件,设置初始的基地声纳位置坐标,并使用优化算法对位置坐标模型进行迭代优化,输出水下多基地声纳系统的实际位置坐标。
7、在以上技术方案的基础上,优选的,步骤s2具体包括:
8、根据所述水下多基地声纳系统的覆盖范围,确定水下多基地声纳系统的度量方式;
9、结合所述水下多基地声纳系统的覆盖范围、度量方式和约束条件,建立优化函数;
10、对所述优化函数进行调整,根据调整后的优化函数建立位置坐标模型。
11、在以上技术方案的基础上,优选的,所述优化函数的公式如下:
12、;
13、其中,u0表示水下多基地声纳系统的融合检测结果,k表示声纳系统检测到目标的次数,n表示判决结果的次数,f(u)表示优化函数的结果。
14、在以上技术方案的基础上,优选的,步骤s3具体包括:
15、s31、根据约束条件,设置w个初始的基地声纳位置坐标,所述初始的基地声纳位置坐标作为第一种群的个体;
16、s32、将所述第一种群中的父代个体两两不重复选择后,进行交叉操作产生2w个新的个体;
17、s33、所述2w个新的个体形成水下多基地声纳系统的覆盖范围,根据所述水下多基地声纳系统的覆盖范围确定基地声纳的适应度值;
18、s34、将所述适应度值按照从大到小的顺序进行降序排列,并选择所述适应度值中前w个个体组成第二种群;
19、s35、对所述第二种群进行变异操作,得到第三种群;
20、s36、重复m次步骤s32-s35进行迭代优化,当m满足终止条件时,则停止迭代优化,输出水下多基地声纳系统的实际位置坐标。
21、在以上技术方案的基础上,优选的,步骤s32中的交叉操作采用的交叉公式具体如下:
22、;
23、其中,z为[0,1]上的随机实数,x为交叉产生的新的个体,x1表示第一个父代个体,x2表示第二个父代个体。
24、更进一步优选的,所述空间阵位优化方法还包括步骤:
25、s4、根据所述水下多基地声纳系统的实际位置坐标对水下多基地声纳系统的阵位进行优化,得到所述水下多基地声纳系统的最优阵位节点。
26、在以上技术方案的基础上,优选的,步骤s4具体包括:
27、所述水下多基地声纳系统的实际位置形成目标辐射区域,对所述实际位置坐标进行交叉操作,生成第四种群;
28、计算所述第四种群中个体的适应度值,根据所述适应度值生成目标函数;
29、计算所述目标辐射区域中各顶点的误差几何分布,将所述各顶点的误差几何分布进行降序排列;
30、对所述各顶点的误差几何分布进行变异操作,得到变异概率;
31、根据所述第四种群中个体的适应度值,计算变异概率的权重系数;
32、根据所述权重系数对水下多基地声纳系统的阵位进行优化,得到所述水下多基地声纳系统的最优阵位节点。
33、在以上技术方案的基础上,优选的,所述变异概率pm的公式为:
34、;(i=1,2,…,w);
35、其中,k1和k2表示(0,1)上的随机实数,w表示种群的个数,fi表示种群中第i个个体的适应度值,fmax表示种群中个体的最大适应度值,表示种群中所有个体适应度值的平均值,表示变异概率的权重系数,其中变异概率的权重系数是(0,1)上的归一化系数。
36、在以上技术方案的基础上,优选的,所述变异概率的权重系数为:
37、;(i,j=1,2,…,w且i≠j);
38、其中,fj表示第j个种群的适应度值。
39、第二方面,本发明提供了一种水下多基地声纳系统的空间阵位优化系统,采用如上述任一项所述的水下多基地声纳系统的空间阵位优化方法,包括:
40、约束模块,用于根据所述水下多基地声呐系统的特性建立约束条件,并确定所述水下多基地声纳的覆盖范围;
41、第一优化模块,用于根据所述约束条件和水下多基地声纳的覆盖范围,建立优化函数,并调整所述优化函数建立位置坐标模型;
42、迭代模块,用于根据所述约束条件,设置初始的基地声纳位置坐标,并使用优化算法对位置坐标模型进行迭代优化,输出水下多基地声纳系统的实际位置坐标。
43、本发明的水下多基地声纳系统的空间阵位优化方法相对于现有技术具有以下有益效果:
44、通过根据声纳的特性建立有效约束条件,根据水下多基地声纳的覆盖范围和约束条件建立优化函数,并调整优化函数以生成位置坐标模型,使位置坐标模型符合实际应用需求,通过对位置坐标模型的不断迭代优化,可以逐步减小误差,提高水下多基地声纳系统的定位精度;
45、通过遗传算法中固定的变异概率计算出水下多基地声纳系统的最佳位置坐标,避免局部最优解的问题,结合蒙特卡洛法和k/n融合准则,进一步增强搜索能力,提高位置坐标模型计算的扩展性,进而提高水下多基地声纳系统的性能和精度;
46、通过采用网格离散化处理方式对水下多基地声纳系统的覆盖范围进行处理,求解覆盖范围内各水下基地声呐的误差几何分布数值的加权平均,降低坐标模型的计算量,从而加速求解出水下多基地的最佳位置分布。
- 还没有人留言评论。精彩留言会获得点赞!