一种基于非局域时空模型的机器人结构件优化方法及装置与流程
本说明书涉及机器人,尤其涉及一种基于非局域时空模型的机器人结构件优化方法及装置。
背景技术:
1、近年,智能机器人在各领域应用愈发广泛,其中,仿人机器人关节数量众多,且内部空间狭小,结构紧凑,在内、外部热环境下,面临着热传导和散热问题。
2、傅里叶热传导定律公式简洁,是工程热物理学的基础和框架。随着超快速制造技术和超小尺度纳米技术在仿人机器人中的广泛应用,经典傅里叶热传导模型无法用来预测结构件的非局域结构的热物理特性,使得机器人的结构件在设计与优化过程中缺乏准确的参照指标,无法满足一些对热力学性能要求较高的业务场景。
3、因此,如何准确的确定出机器人结构件的热物理特性进而对其进行优化设计,保证机器人的热物理性能,是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种基于非局域时空模型的机器人结构件优化方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种基于非局域时空模型的机器人结构件优化方法,包括:
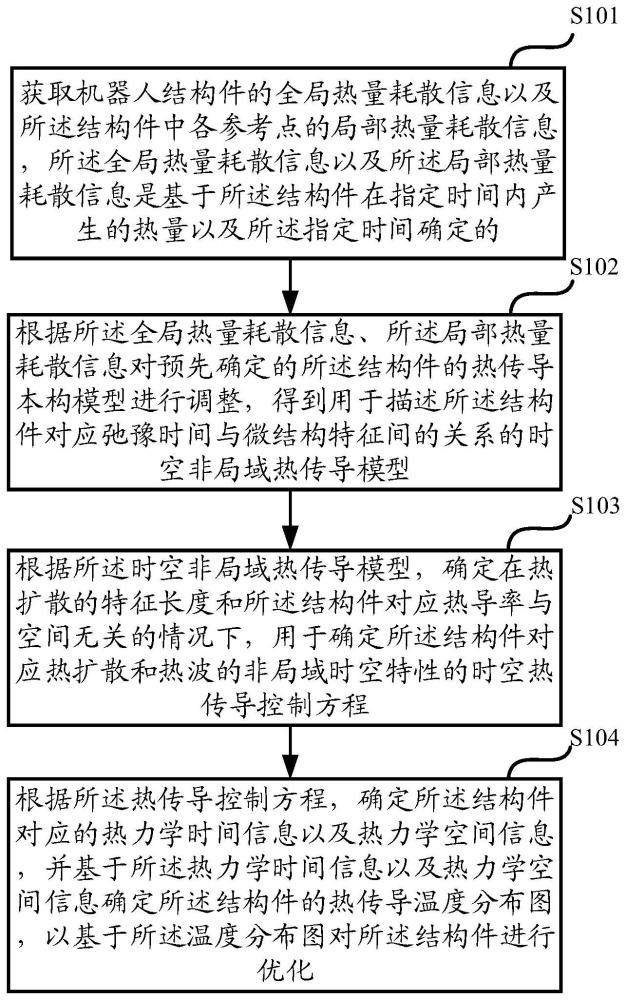
4、获取机器人结构件的全局热量耗散信息以及所述结构件中各参考点的局部热量耗散信息,所述全局热量耗散信息以及所述局部热量耗散信息是基于所述结构件在指定时间内产生的热量以及所述指定时间确定的;
5、根据所述全局热量耗散信息、所述局部热量耗散信息对预先确定的所述结构件的热传导本构模型进行调整,得到用于描述所述结构件对应的弛豫时间与微结构特征间的关系的时空非局域热传导模型;
6、根据所述时空非局域热传导模型,确定在热扩散的特征长度和所述结构件对应热导率与空间无关的情况下,用于确定所述结构件对应热扩散和热波的非局域时空特性的时空热传导控制方程;
7、根据所述热传导控制方程,确定所述结构件对应的热力学时间信息以及热力学空间信息,并基于所述热力学时间信息以及热力学空间信息确定所述结构件的热传导温度分布图,以基于所述温度分布图对所述结构件进行优化。
8、可选地,根据所述全局热量耗散信息、所述局部热量耗散信息对预先确定的所述结构件的热传导本构模型进行调整,得到用于描述所述结构件对应的弛豫时间与微结构特征间的关系的时空非局域热传导模型,具体包括:
9、根据所述结构件的温度、所述结构件对应的二阶热导率张量、各参考点对应的热量影响因素,确定所述全局热量耗散信息以及所述局部热量耗散信息对应二次多项式的分量;
10、根据所述全局热量耗散信息以及所述局部热量耗散信息对应二次多项式的分量对所述结构件的热传导本构模型进行调整,得到所述时空非局域热传导模型。
11、可选地,根据所述全局热量耗散信息、所述局部热量耗散信息对预先确定的所述结构件的热传导本构模型进行调整,得到用于描述所述结构件对应的弛豫时间与微结构特征间的关系的时空非局域热传导模型,具体包括:
12、根据所述全局热量耗散信息、所述局部热量耗散信息,基于热力学稳定性要求的充分条件和所述结构件各参考点热导率的对称性,对所述热传导本构模型进行调整,得到所述时空非局域热传导模型。
13、可选地,所述各参考点热导率、所述全局热量耗散信息所对应的函数值以及所述局部热量耗散信息所对应的函数值均不小于0,所述结构件各参考点对应的热导率相等。
14、可选地,根据所述时空非局域热传导模型,确定在热扩散的特征长度和所述结构件对应热导率与空间无关的情况下,用于确定所述结构件对应热扩散和热波的非局域时空特性的时空热传导控制方程,具体包括:
15、根据所述时空非局域热传导模型、所述结构件对应的材料密度以及所述结构件对应单位质量的比热容,确定在所述特征长度信息和所述结构件对应热导率与空间无关的情况下的所述热传导控制方程。
16、可选地,根据所述热传导控制方程,确定所述结构件对应的热力学时间信息以及热力学空间信息,具体包括:
17、根据所述结构件对应的温度、所述指定时间以及所述特征长度,确定归一化温度特征变量、归一化时间特征变量、归一化位置特征变量以及归一化内在特征长度;
18、根据所述归一化温度特征变量、所述归一化时间特征变量、所述归一化位置特征变量以及所述归一化内在特征长度对所述热传导控制方程进行转换,得到无量纲控制方程;
19、对所述无量纲控制方程进行求解,得到所述热力学时间信息以及热力学空间信息。
20、可选地,对所述无量纲控制方程进行求解,得到所述热力学时间信息以及热力学空间信息,具体包括:
21、基于时空边界条件、拉普拉斯变换、二阶二次帕德近似以及逆拉普拉斯变换,对所述无量纲控制方程进行求解,得到所述热力学时间信息以及热力学空间信息。
22、本说明书提供了一种基于非局域时空模型的机器人结构件优化方法,包括:
23、获取模块,获取机器人结构件的全局热量耗散信息以及所述结构件中各参考点的局部热量耗散信息,所述全局热量耗散信息以及所述局部热量耗散信息是基于所述结构件在指定时间内产生的热量以及所述指定时间确定的;
24、调整模块,根据所述全局热量耗散信息、所述局部热量耗散信息对预先确定的所述结构件的热传导本构模型进行调整,得到用于描述所述结构件对应的弛豫时间与微结构特征间的关系的时空非局域热传导模型;
25、确定模块,根据所述时空非局域热传导模型,确定在吧热扩散的特征长度和所述结构件对应热导率与空间无关的情况下,用于确定所述结构件对应热扩散和热波的非局域时空特性的时空热传导控制方程;
26、优化模块,根据所述热传导控制方程,确定所述结构件对应的热力学时间信息以及热力学空间信息,并基于所述热力学时间信息以及热力学空间信息确定所述结构件的热传导温度分布图,以基于所述温度分布图对所述结构件进行优化。
27、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述基于非局域时空模型的机器人结构件优化方法。
28、本说明书提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述基于非局域时空模型的机器人结构件优化方法。
29、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
30、在本说明书提供的一种基于非局域时空模型的机器人结构件优化方法中,根据机器人结构件的全局热量耗散信息以及局部热量耗散信息对预先确定的结构件的热传导本构模型进行调整,得到用于描述结构件对应时间弛豫项与微结构特征间的关系的时空非局域热传导模型;根据时空非局域热传导模型,确定在热扩散的特征长度和结构件对应热导率与空间无关的情况下,用于确定结构件对应热扩散和热波的非局域时空特性的时空热传导控制方程;根据热传导控制方程,确定结构件对应的热力学时间信息以及热力学空间信息,并基于热力学时间信息以及热力学空间信息确定结构件的热传导温度分布图,以基于温度分布图对结构件进行优化。
31、从上述方法可以看出,本方案通过结构件的全局热量耗散信息以及局部热量耗散信息所确定出的时空非局域热传导本构模型可以充分表征结构件对应的弛豫时间与微结构特征间的关系,之后可以进一步构建出在热扩散的特征长度和结构件对应热导率与空间无关的情况下,用于确定结构件对应热扩散和热波的非局域时空特性的时空热传导控制方程,使得最终确定出的热力学信息可以准确的对机器人结构件的非局域结构的热物理特性进行表达,进一步保证了优化后结构件的热物理学性能。
- 还没有人留言评论。精彩留言会获得点赞!