一种基于最优化理论的轨道追逃拦博弈策略设计方法
本发明属于航空航天空间轨道博弈与空间安全领域,特别是涉及一种基于最优化理论的轨道追逃拦博弈策略设计方法。
背景技术:
1、随着各国航天技术的不断发展,航天器数量不断增多,任务能力迅速提升,空间环境也日趋复杂。在这种趋势下,空间安全已成为涉及国家安全与利益的“高边疆”,空间领域已成为大国博弈对抗的竞技场。由于各个航天大国的空间对抗手段不断丰富,能力提升迅速,空间作战体系初步构建,我国空间安全面临极大威胁。因此,我方航天器需要具备与之相匹配的空间博弈对抗能力,以保证能够更好地完成任务。
2、在空间轨道博弈中,会出现多个追击者对多个目标进行追击拦截。为了提高多追击者的整体作战性能,存在目标分配系统将多个追击者分配给同一个目标的情况。与单个追击者对单个逃逸航天器相比,多对单的追击问题中存在多个追击者相对运动的相互耦合,如何对各个追击者进行协调控制,以实现最优的追击拦截效果是多对一追逃拦研究的重要问题。
技术实现思路
1、本发明的目的在于提供一种基于最优化理论的轨道追逃拦博弈策略设计方法,解决了多对单的追击中存在多个追击者相对运动的相互耦合的问题。
2、本发明是通过以下技术方案来实现:
3、本发明公开了一种基于最优化理论的轨道追逃拦博弈策略设计方法,所示回合制为博弈双方的轨道机动是以序贯方式交替实施,当只有一方实施轨道机动且延迟反应时间后,另一方才能实施轨道机动;航天器分为追击者、拦截者及逃逸者;
4、具体包括以下过程:
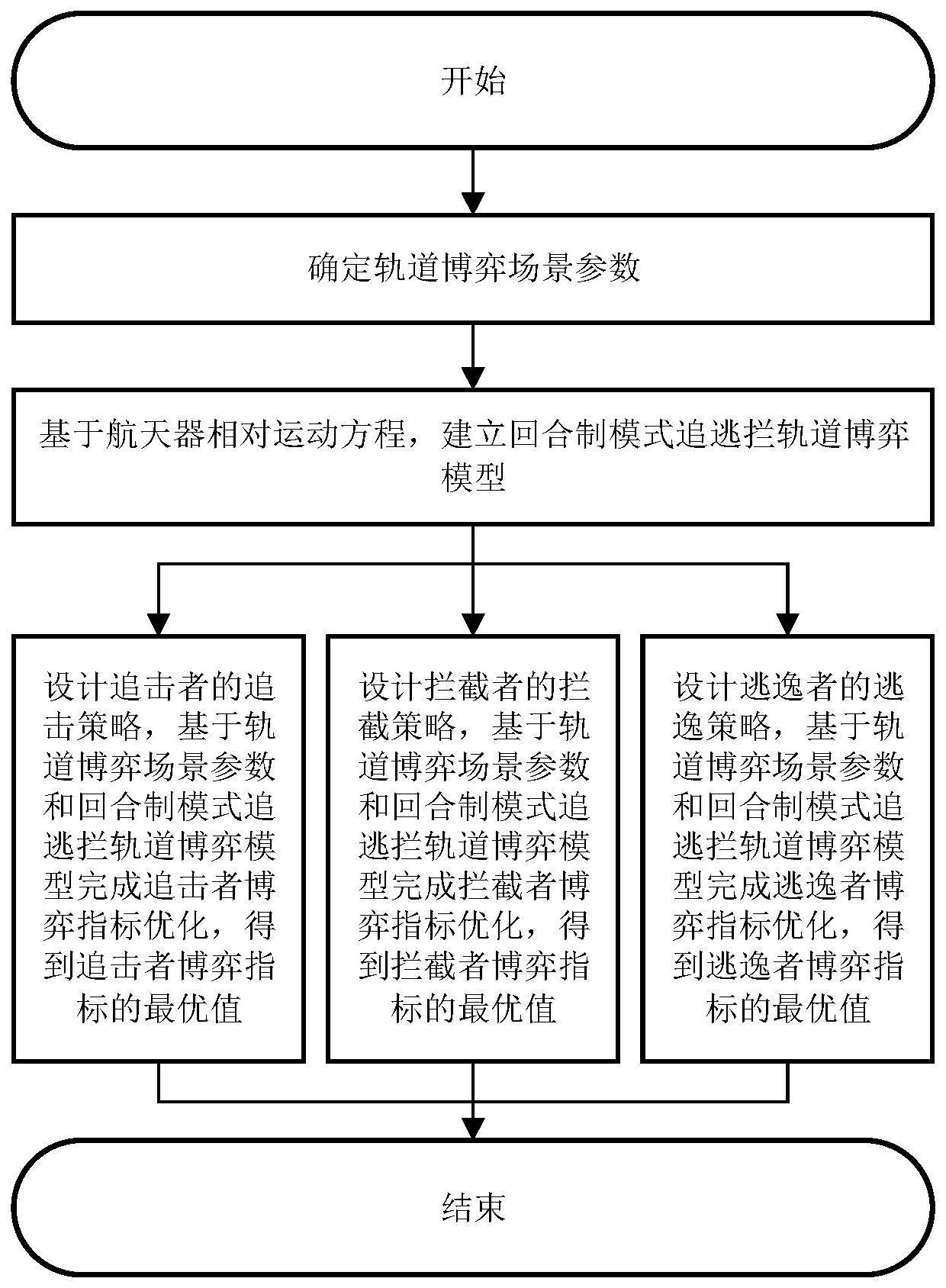
5、确定轨道博弈场景参数;
6、基于航天器相对运动方程,建立回合制模式追逃拦轨道博弈模型;
7、设计追击者的追击策略,基于轨道博弈场景参数和回合制模式追逃拦轨道博弈模型完成追击者博弈指标优化,得到追击者博弈指标的最优值;
8、设计拦截者的拦截策略,基于轨道博弈场景参数和回合制模式追逃拦轨道博弈模型完成拦截者博弈指标优化,得到拦截者博弈指标的最优值;
9、设计逃逸者的逃逸策略,基于轨道博弈场景参数和回合制模式追逃拦轨道博弈模型完成逃逸者博弈指标优化,得到逃逸者博弈指标的最优值。
10、进一步,轨道博弈场景参数包括lvlh坐标系的参考航天器轨道半长轴、脉冲控制间隔时间、距离判断条件参数、双方初始位置速度、及脉冲约束条件。
11、进一步,s1中,回合制模式追逃拦轨道博弈模型如下:
12、
13、
14、公式(1)中,k代表双方博弈回合计数;j代表追逃博弈的双边优化指标;
15、p1代表追击者;p2代表拦截者;e1代表逃逸者;
16、代表追击者脉冲速度增量控制构成的列向量;
17、代表拦截者脉冲速度增量控制构成的列向量;
18、代表逃逸者脉冲速度增量控制构成的列向量;
19、代表追击者脉冲速度增量控制的约束函数;
20、代表拦截者脉冲速度增量控制的约束函数;
21、代表逃逸者脉冲速度增量控制的约束函数;
22、代表追踪者的状态矢量,具体为
23、代表拦截者的状态矢量,具体为
24、代表逃逸者的状态矢量,具体为
25、x代表lvlh系下轨道径向的位置分量;
26、y代表lvlh系下飞行方向的位置分量;
27、z代表lvlh系下轨道角动量方向的位置分量;
28、vx代表lvlh系下轨道径向的速度分量;
29、vy代表lvlh系下轨道飞行方向的速度分量;
30、vz代表lvlh系下轨道角动量方向的速度分量;
31、δt为脉冲控制间隔时间;
32、其中:矩阵满足:
33、b=[03×3,i3×3]t (2)
34、式(2)中:
35、
36、脉冲控制间隔时间为δt,状态转移矩阵φ(k+1,k)用于实现从k·δt时刻到(k+1)·δt时刻的状态转移,其具体形式通过轨道动力学里的cw方程构建,具体为:
37、
38、其中表示lvlh坐标系的原点绕地球旋转的速度,μ为地球引力场系数,a为lvlh坐标系的参考航天器轨道半长轴
39、进一步,所述设计追击者的追击策略,具体过程为:
40、设计追击者p1的第k个控制施加时刻的策略指标为:
41、jp1(k)=(xp1(k+1)-xe1(k+1))t·qp1e1·(xp1(k+1)-xe1(k+1)) (5)
42、式中,qp1e1为权值分配矩阵,且存在约束:
43、
44、取
45、则
46、
47、则追击者p1的第k个控制施加时刻的策略指标为:
48、
49、进一步,所述设计拦截者p2的拦截策略具体为:
50、设计拦截指标函数,拦截指标函数包括拦截者追击项、相对位置速度协同项和方位角协同项,表达式为:
51、jp2=η1·jp2e1+η2·jp1p2+η3·ja;
52、其中,η1,η2,η3为各项权值;jp2e1为拦截者追击项;jp1p2为相对位置速度协同项;ja为方位角协同项。
53、进一步,拦截者追击项jp2e1的设计具体为:
54、取拦截者的第k个控制施加时刻的追击项指标为:
55、
56、式中,qp2e1为权值分配矩阵,取
57、
58、其中,
59、
60、公式(8)变换为:
61、
62、进一步,拦截者的相对位置速度协同项jp1p2设计具体为:
63、描述追击方通信拓扑结构的有向图有一个生成树并定义相关参数aij,如果第i个追击者能获取第j个追击者信息,则aij=1,否则为0;基于以上假设,第i个追击者的局部领域跟踪误差:
64、
65、则设计相对位置速度协同项为:
66、
67、对于追逃拦博弈,取i,j分别为1,2,并取:
68、
69、
70、于是
71、进一步,拦截者的方位角协同项ja设计过程具体为:
72、定义p1、p2与e1的位置夹角为θ,为了保证追击航天能够从不同方位角夹击逃逸航天器,取θ→π,即θ*=π,由于
73、
74、因此,取方位角协同项为:
75、ja=cosθ;
76、其中,
77、
78、
79、进一步,所述设计逃逸者的逃逸策略,具体过程为:
80、设计逃逸者e1的第k个控制施加时刻的指标为:
81、
82、其中,qe1p1、qe1p2为权值分配矩阵,且存在约束:
83、
84、逃逸者e1的优化指标为:
85、je1(k)=je1p1(k)+je1p2(k)
86、=-xe1p1(k+1)t·qe1p1·xe1p1(k+1)-xe1p2(k+1)t·qe1p2·xe1p2(k+1);
87、其中,
88、
89、
90、进一步,根据k值不同,具有两种情况,当k为奇数时,说明追击者与拦截者进行脉冲控制,逃逸者无控制;当k为偶数时,说明逃逸者进行脉冲控制,追击者与拦截者无控制;
91、当k为奇数时,针对追击者p1,追击者p1博弈指标优化的过程具体为:
92、公式(1)简化为:
93、
94、
95、追击者脉冲速度增量控制的约束函数为:
96、
97、则
98、
99、采用拉格朗日乘子法,通过引入辅助变量,进行博弈策略求解,具体如下:
100、采用引入辅助变量,将不等式约束下的优化问题转化为等式约束;取拉格朗日函数l(δvp,λ)=jk-λt·h(δvp);
101、其中,取λ=[λ1,λ2,λ3,λ4,λ5,λ6,λ7,λ8,λ9,λ10,λ11,λ12]t;
102、使用外点法,引入惩罚项,将等式约束下的优化问题转化为无约束优化问题;引入惩罚项,其增广目标函数为:
103、
104、得到:
105、
106、针对拦截者p2,拦截者p2博弈指标优化的过程具体为:
107、公式(1)简化为:
108、
109、
110、拦截者脉冲速度增量控制的约束函数为:
111、
112、则
113、
114、采用拉格朗日乘子法,通过引入辅助变量,进行博弈策略求解,具体如下:
115、采用引入辅助变量,将不等式约束下的优化问题转化为等式约束;取拉格朗日函数l(δvp,λ)=jk-λt·h(δvp);
116、其中,取λ=[λ1,λ2,λ3,λ4,λ5,λ6,λ7,λ8,λ9,λ10,λ11,λ12]t;
117、使用外点法,引入惩罚项,将等式约束下的优化问题转化为无约束优化问题;引入惩罚项,其增广目标函数为:
118、
119、得到:
120、
121、当k为偶数时,针对逃逸者e1,逃逸者e1博弈指标优化的过程具体为:
122、公式(1)简化为:
123、
124、
125、追击者脉冲速度增量控制的约束函数为:
126、
127、则
128、
129、采用拉格朗日乘子法,通过引入辅助变量,进行博弈策略求解,具体如下:
130、采用引入辅助变量,将不等式约束下的优化问题转化为等式约束;取拉格朗日函数
131、其中,取λ=[λ1,λ2,λ3,λ4,λ5,λ6,λ7,λ8,λ9,λ10,λ11,λ12]t;
132、使用外点法,引入惩罚项,将等式约束下的优化问题转化为无约束优化问题;引入惩罚项,其增广目标函数为:
133、
134、得到:
135、
136、最后对于式(20)、(21)及(22)均做如下处理:
137、利用拟牛顿法进行迭代求解,进而获得近似解:
138、采用拟牛顿算法处理优化模型的无约束子问题,然后判断是否符合优化终止条件,若是不符合,进一步更新σ和λ,再一次用拟牛顿算法处理,直到符合终止条件,此时得到博弈策略的最优值。
139、与现有技术相比,本发明具有以下有益的技术效果:
140、本发明公开了一种基于最优化理论的轨道追逃拦博弈策略设计方法,是一种轨道博弈场景下的追拦协同机制,具有模型简单、物理意义明确和策略求解方式简单等特点。与传统追逃博弈只考虑距离因素不同,本方法考虑在追逃拦博弈场景中的位置协同与方位协同等因素,可实现对非合作目标的追击与拦截。在多个追击者对同一个目标的追击拦截过程中该模型和方法的应用,可为采用脉冲推力的航天器追逃拦协同问题提供有效解决方案,从而为空间轨道博弈、空间失效航天器清除等工程应用的实现奠定理论基础。
- 还没有人留言评论。精彩留言会获得点赞!