缸套冷却水温度控制优化方法、系统、控制方法及控制器与流程
本发明涉及低速机缸套冷却水温度控制,具体地,涉及一种基于自适应粒子群算法的低速机缸套冷却水温度控制优化方法、系统、控制方法及控制器。
背景技术:
1、缸套冷却水温度是低速机稳定运行的一个重要热工参数,冷却水温度的变化对柴油机的工作性能、运行寿命等有着重要影响,对其进行精准控制可以有效地控制柴油机缸套的低温腐蚀、高温腐蚀并减少热应力。
2、缸套冷却水温度控制一般采用pid控制技术,传统pid控制器的参数在设定之后基本不变,无法达到最好的控制效果。传统pid参数整定方法过程复杂、整定效果、性能不佳,对运行工况的适应性较差,易发生超调量大和震荡等情况,无法满足现代工业发展对控制过程的高要求。
3、因此,在缸套冷却水温度控制技术中,采用合适的优化算法对pid参数进行整定就尤为关键。目前没有发现同本发明类似技术的说明或报道,也尚未收集到国内外类似的资料。
技术实现思路
1、本发明针对现有技术中存在的上述不足,提供了一种基于自适应粒子群算法的低速机缸套冷却水温度控制优化方法、系统、控制方法及控制器。
2、根据本发明的一个方面,提供了一种缸套冷却水温度控制优化方法,包括:
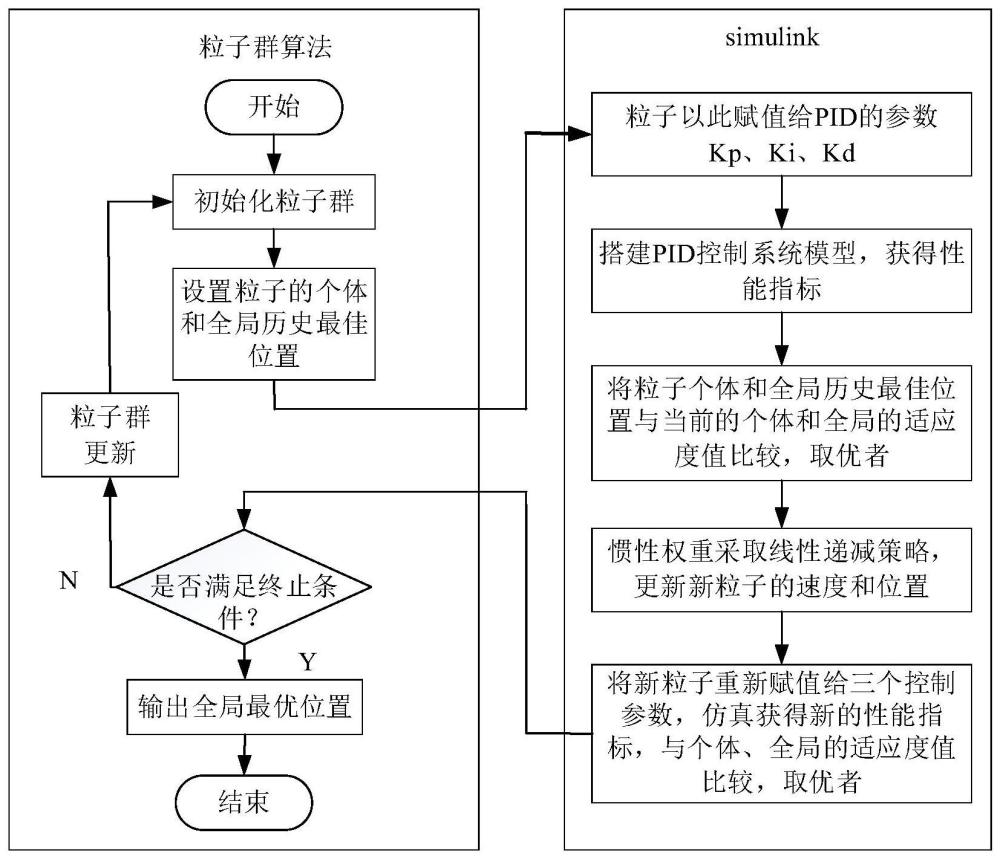
3、提供一pid控制器的性能评价指标作为粒子群优化算法的评价函数,用于计算粒子位置的适应度值;
4、将pid控制器的参数kp、ki和kd作为粒子的位置矢量,基于所述评价函数,计算粒子当前位置的适应度值;
5、基于所述粒子当前位置的适应度值,将个体历史最佳位置和全局历史最佳位置分别与个体当前适应度值和全局当前适应度值进行比较,取优者;
6、不断更新粒子群,最终获得的全局最优位置,即为pid控制器的最优参数;
7、利用所述pid控制器的最优参数对pid控制器进行参数整定,用于缸套冷却水温度控制优化。
8、优选地,所述提供一pid控制器的性能评价指标作为粒子群优化算法的评价函数,包括:
9、选用itae性能指标作为粒子群优化算法中的评价函数,即:
10、
11、式(1)中,j为性能指标,g(t)为输出相对于理想输出的误差绝对值,t为时间。
12、优选地,所述将pid控制器的参数kp、ki、kd作为粒子的位置矢量,基于所述评价函数,计算粒子当前位置的适应度值,包括:
13、将pid控制器的参数kp、ki和kd作为粒子的位置矢量;
14、对粒子群中粒子的位置、速度、学习因子及最大迭代次数进行初始化;
15、将粒子群中的粒子位置依次赋值给参数kp、ki和kd,完成参数传递过程;
16、对pid控制器进行模型仿真,基于所述评价函数,获得该组参数所对应的性能指标,即为粒子当前位置的适应度值。
17、优选地,所述基于所述粒子当前位置的适应度值,将个体历史最佳位置和全局历史最佳位置分别与个体当前适应度值和全局当前适应度值进行比较,取优者,包括:
18、设定非线性动态自适应惯性权重w,用于调节粒子群全局探测能力与局部开发能力之间的平衡;其中,惯性权重w的表达式为:
19、
20、式(2)中,wmax为最大惯性权重,wmin为最小惯性权重,m为控制系数,t为当前迭代次数,tmuax为最大迭代次数;
21、依据以下速度和位置更新公式来对新粒子的速度和位置进行更新:
22、vi(t+1)=wvi(t)+c1r1((pbesti(t)+gbest(t))/2-xi(t))+c2r2((pbesti(t)-gbest(t))/2-xi(t)) (3)
23、xi(t+1)=xi(t)+vi(t+1) (4)
24、式(3)和式(4)中,t是当前迭代次数,w为惯性权重,c1和c2是学习因子,r1和r2是在[0,1]中的随机数,vi(t)为粒子i在t时刻的速度,xi(t)为粒子i在t时刻的位置,pbesti(t)为粒子i在t时刻的个体最优位置,gbesti(t)为粒子i在t时刻的全局最优位置;
25、将新的粒子位置依次赋值给pid控制器的参数kp、ki和kd,通过pid控制器模型仿真得到新的性能指标,即为粒子新位置的适应度值;将所述粒子新位置的适应度值与原来的个体极值和全局极值的适应度值进行比较,取优者。
26、优选地,该方法还包括如下任意一项或任意多项:
27、wmax取值为0.9;
28、wmin取值为0.2;
29、m取值为3;
30、c1和/或c2取值为2。
31、根据本发明的另一个方面,提供了一种缸套冷却水温度控制优化系统,包括:
32、粒子群优化算法模块,该模块用于提供一pid控制器的性能评价指标作为粒子群优化算法的评价函数;将pid控制器的参数kp、ki和kd作为粒子的位置矢量,基于所述评价函数,计算粒子当前位置的适应度值;
33、评价环节模块,该模块基于所述粒子当前位置的适应度值,将个体历史最佳位置t和全局历史最佳位置分别与个体当前适应度值和全局当前适应度值进行比较,取优者;不断更新粒子群,最终获得的全局最优位置,即为pid控制器的最优参数;
34、pid优化模块,该模块利用所述pid控制器的最优参数对pid控制器进行参数整定,用于缸套冷却水温度控制优化。
35、根据本发明的第三个方面,提供了一种缸套冷却水温度控制方法,采用本发明上述中任一项所述的缸套冷却水温度控制优化方法,获得pid控制器的最优参数对pid控制器进行参数整定,输出的pid控制结果控制三通阀伺服电机运行,进而通过三通阀的开度情况对缸套冷却水温度进行控制。
36、根据本发明的第四个方面,提供了一种缸套冷却水温度控制器,采用本发明上述中任一项所述的缸套冷却水温度控制优化方法,获得pid控制器的最优参数对pid控制器进行参数整定,输出的pid控制结果控制三通阀伺服电机运行,进而通过三通阀的开度情况对缸套冷却水温度进行控制。
37、根据本发明的第五个方面,提供了一种控制器可读存储介质,当所述存储介质中的指令由控制器内的处理器执行时,使得所述控制器能够执行本发明上述中任一项所述的控制优化方法或本发明上述中所述的控制方法。
38、由于采用了上述技术方案,本发明与现有技术相比,具有如下至少一项的有益效果:
39、本发明提供的缸套冷却水温度控制优化方法、系统、控制方法及控制器,基于自适应粒子群算法,通过自适应策略动态调整惯性权重,不断获得粒子的全局最优位置,即获得pid控制器的最优参数,完成pid控制器参数实时整定,实现精确地控制冷却水的温度,提高柴油机工作性能的同时实现节能环保的目的。
40、本发明提供的缸套冷却水温度控制优化方法、系统、控制方法及控制器,整定方法过程简单、整定效果、性能好,对运行工况的适应性强,并能够有效避免发生超调量大和震荡等情况,满足现代工业发展对控制过程的高要求。
41、本发明提供的缸套冷却水温度控制优化方法、系统、控制方法及控制器,采用非线性动态自适应惯性权重的粒子群优化算法,将惯性权重与当前的迭代次数相关联,赋予动态的惯性权重数值,使整个系统的优化过程具有自适应性,满足粒子群算法在不同的优化过程中对局部寻优和全局寻优的能力,从而使算法更快速精确收敛到全局最优点。
- 还没有人留言评论。精彩留言会获得点赞!