一种针对典型草原地表植物量的检测估算方法
本发明涉及智能农业机械化技术,尤其是一种针对典型草原地表植物量的检测估算方法。
背景技术:
1、中国是草地资源大国,草地总面积4亿公顷左右,约占国土面积的40%。草原在气候调节、水源保护和生态平衡维护方面发挥着许多重要作用。典型草原是中国北方草原畜牧业生产基地的主体,在生产优质无污染低成本草食畜禽产品方面有优势,对发展经济、提高人民生活水平、改善食物结构具有重要意义。当前,典型草原地带牧草退化、土地沙化、盐渍化和水土流失严重,鼠害和虫害猖獗,毒草大面积孳生,其主要原因都是盲目开垦、过度放牧破坏了草原植被和生态平衡。控制放牧强度是实现草畜平衡的重要因素,在草原资源调查中,样方法是普遍常用的方法,大部分研究人员通过样方法来分析草地群落植物的盖度变化。为了使人从传统的采集草类植被信息获取的方式解放出来,研发智能化检测装备对于草地资源调查十分有帮助。虽然无人机、卫星遥感目前在植被的高度、盖度上有很多应用,但是针对典型草原草地资源调查却并不适用。无人机、卫星遥感比起地面估算方法,植被检测的范围和尺度较大,但小样方区域的检测并不适用,定量检测部分草地覆盖的变化具有挑战性,因为在检测中必须使用两组卫星图像在相同条件下如大气条件、季节条件等。同时,无人机搭载的传感器如激光多线雷达、多光谱、高光谱等传感器对于草地管理或研究人员成本较太高。除此之外,典型草原多为温带半干旱大陆性气候,多风且强风时段较多,而目前民用无人机5级以上的风就无法正常飞行。
2、我国的草地智能化播种与施肥在决策系统上缺少植被盖度、高度与植物量信息获取与挖掘。尤其在精量施肥控制这方面,缺少对施肥控制的判断。针对不同的植被生长情况,控制器需分析施肥量的多少。而这一过程中最关键的部分即为分析植被的生长情况,即地表植物量的高低。目前针对田间作物的植物量估算已有一些专家研究,但田间作物生长在人为干预下较为统一,而草地的植被生长情况较为复杂,野外草原的植被种类更是多达几百种,这使得播种和施肥的决策上更为困难。
3、因此研发一种地面搭载的一种典型草原植被盖度的检测系统可有效地对草原进行监测,并提出高效的估算方法,这可以节约人力、物力,并保障了草业工作者的野外安全。该装置和方法通过对植物量的监测,还可用于草地补播和施肥,对播种施肥的处方图建立有所帮助,能实现智能化播种和施肥的决策。本发明的检测系统包括检测装置以及检测方法,可以推动草原资源调查的智能化进步。
技术实现思路
1、本发明的目的在于提供一种针对典型草原地表植物量的检测估算方法,可有效地对草原进行监测。
2、为了解决上述问题,本发明提供一种针对典型草原地表植物量的检测估算方法,其特征在于,包括以下步骤:
3、s10、用图像采集摄像头获取样方区域rgb数据,深度摄像头获取深度点云数据,热红外传感器获取红外光谱数据,数据融合分析,得出植被分布信息;
4、s20、根据所述植被分布信息,基于图像像元估算盖度;
5、s30、基于离散点聚拟,对地表植被的高度检测,获取样方高度;
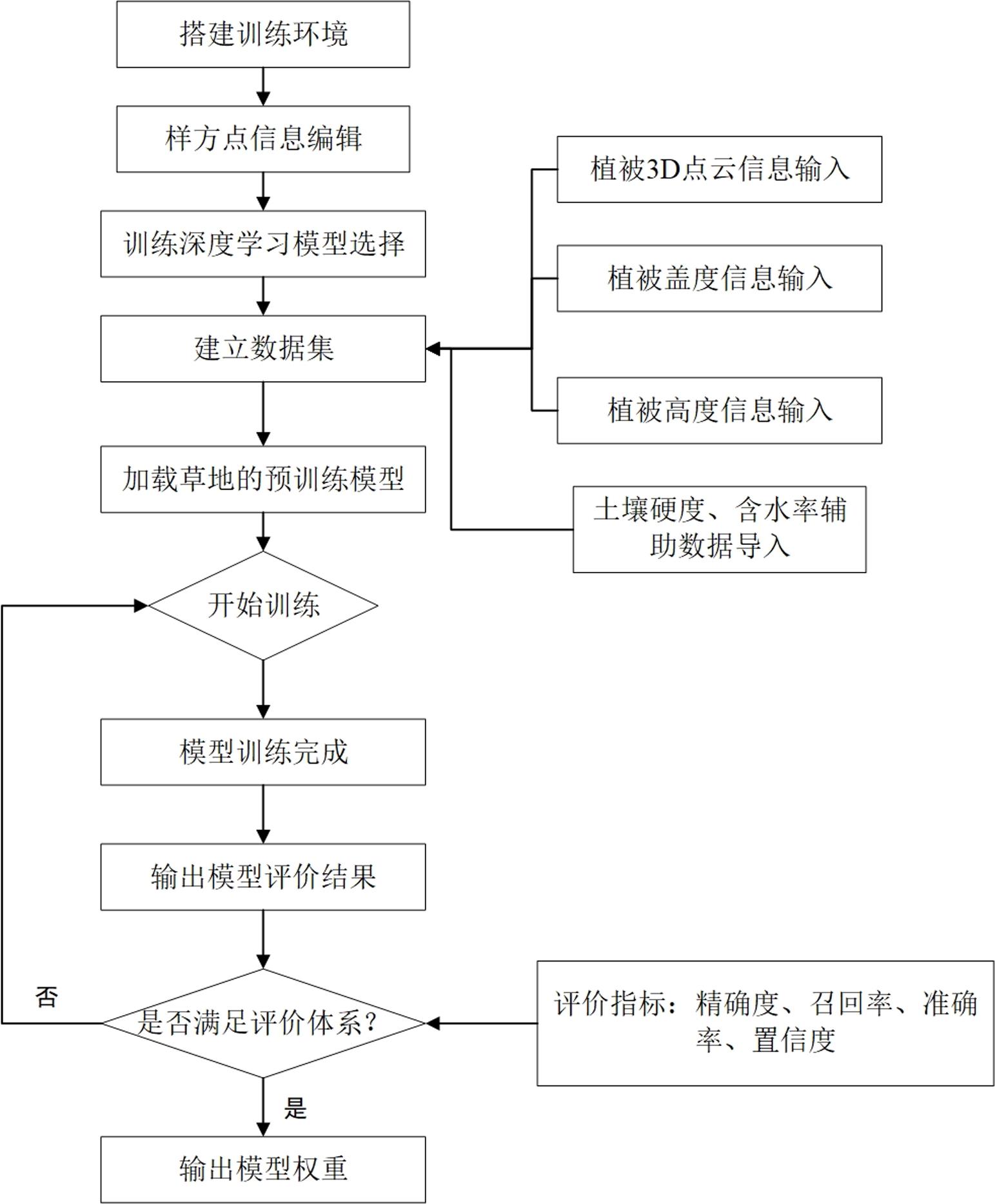
6、s40、搭载训练模型对样方区域的植被环境进行训练,将获取的样方信息进行编辑整理;
7、s50、基于深度学习算法建立预测模型,根据以往试验获取的高度、盖度信息建立一个数据集,并将土壤的硬度、含水率信息作为辅助数据输入,加载训练模型做为预测模型,开始训练;
8、s60、预测模型训练完成,建立预测模型的评价体系,通过精确度、召回率、准确率、置信度进行评价,设定一个标准的阈值,若评价体系没有通过则再次进行训练,修改模型参数进行优化,直到通过评价体系,最终获取植物量预测的权重文件,该权重文件能够通过输入高度、盖度、硬度、含水率信息来完成区域内植物量估算。
9、所述步骤s10中包括以下步骤:
10、s11、以rgb数据作为后续检测分割的基准,rgb图像输入后,首先经过图像增强来增加植被和土壤的对比度,根据不同的植被调整红、绿、蓝三个通道的特征,设定标准的阈值;
11、s12、图像增强后对植被区域进行一轮检测,基于深度学习对植被区域进行范围内识别,标出二轮感知区域,标出检测框后,输出该植被区域的顶点坐标,完成二轮感知区域位置在图像上的定位;
12、s13、在rgb数据处理的过程中,深度点云图以及热红外图像也在上位机处理器进行处理,深度点云图获取后,处理器会将植被的高度和土壤距深度相机的深度信息输出,进而生成深度点云数据,在深度点云图中植被和土壤呈现不同颜色的深度信息,而土壤距深度相机的深度相比植被更为固定,从而能够获取植被的区域范围;
13、s14、在热红外图像输入后,处理器获取植被温度和土壤温度的信息,在处理后输出植被和土壤的红外光谱图,由于土壤和植被的温度不同,植被区域会被明显的检测分割出来,此时,深度点云图中的植被检测分割信息以及红外光谱图中的植被检测分割信息都被获取;
14、s15、通过rgb图像的二轮感知明确植被在图像的分布,将植被检测分割信息、植被检测分割信息同rgb图像进行语义融合,语义融合的目的是为了将三种传感数据进行不同尺度的信息提取,从而获取更全面的植被语义信息;
15、s16、将语义融合后的植被语义信息作为参考,检测分割后的rgb图像能够获取较为全面的植被分布,将分割后的植被区域信息输出,为后续盖度估算提供数据支撑。
16、所述步骤s20中包括以下步骤:
17、s21、对分割后的植被区域信息进行颜色通道特征提取,即获取标定区域信息的三通道颜色值;
18、s22、对原图像进行灰度化处理,使得原图像的各个像素点的颜色通道值都是相同的;
19、s23、对灰度化处理后的图像获取像素数,通过图像本身的像素大小计算或通过图像对灰度化的颜色通道值进行筛选,获取像素点的数目;
20、s24、基于三通道颜色值,对颜色点进行筛选,获取植被区域的像素点数,植被区域与图像的像素点数的比值即为该植被区域的盖度。
21、所述步骤s30中包括以下步骤:
22、s31、搭载rgb传感器的设备对检测区域的6-8个进行图像获取;
23、s32、先对单个角度的rgb信息进行处理,分为两个过程:
24、(1)第一个过程是对图像进行增强,增加植被与外部环境对比度,增强后对植被区域进行边缘检测获取边缘特征点;为了获取后续高度估算的特征点,对边缘检测后的外部特征进行离散化,通过聚类的方式进行处理,设定阈值,点与点的距离的既定范围拟合成一个点,这样植被的边缘特征就被拟合成单独的离散点;各个离散点由于拟合后在图像上会呈现为有面积的圆形,输出圆形的圆心坐标点为备选点;
25、(2)第二个过程是对草的穗进行检测,针对成熟期后的植被,穗与茎秆的颜色特征不同,通过目标检测框进行识别,检测框输出后获取框的四个顶点坐标,该顶点坐标内的区域即为筛选区域;
26、s33、经过离散化聚拟化的备选点经过检测框的筛选区域可将大部分茎秆及以下的筛除,剩余的备选点输出后,为后续的高度估算提供数据支持,处理器根据判定估算该筛选区域内极值还是平均值,若为极值,则输出备选点的极值,若为平均值,则取前10个点的平均值进行输出;
27、s34、输出后的点的坐标处在像素坐标系,经过图像坐标系换算到世界坐标系,世界坐标系下点的纵坐标即为本轮高度的估算结果。
- 还没有人留言评论。精彩留言会获得点赞!