一种基于CT图像的三维光学重建方法
本发明属于三维光学重建,尤其涉及一种基于ct图像的三维光学重建方法。
背景技术:
1、三维重建(3-dimensional reconstruction)是指将二维图像或投影数据转化为三维物体的空间信息,重构出的模型方便计算机显示和进一步处理,在医学、生物学、工程学、计算机视觉等多个领域有广泛的应用,对于研究和分析物体的结构和形态具有重要意义。随着成像技术的不断进步,高分辨率三维重建成为一个重要的研究方向。研究人员通过改进算法、使用高分辨率传感器和改进数据采集方法等手段,以实现更精确和详细的三维重建结果。在相关技术中,基于深度相机的三维重构方法可以提供物体的深度信息,因此可以直接建模,主要有结构光投影(structured light projection)和tof飞行时间(time offlight)方法。结构光投影方法是利用光源向被测物体投影按一定规则编码的图像,编码图案受到物体表面形状的调制而产生形变。利用相机拍摄带有形变的结构光,通过相机与投影光源之间的位置关系和结构光形变的程度获得被探测物体的深度信息。该方法虽然精确度高,但是容易受物体周围环境光干扰,而且结构光投影仪必须预先标定。tof飞行时间方法通过记录光束传播时间来计算被测物体表面的深度距离。系统发射装置发射脉冲信号,经被测物体反射后被探测器接收,通过光信号从发出到接收的时间与光速便可以计算出深度值。tof技术在长距离或弱光条件下可能受到噪声和精度限制,其分辨率较低,无法实现高精度的三维重建,进而无法准确还原物体的形状和几何结构。
技术实现思路
1、(一)要解决的技术问题
2、为了解决现有技术的上述问题,本发明提供一种基于ct图像的三维光学重建方法。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、本发明提供了一种基于ct图像的三维光学重建方法,包括:
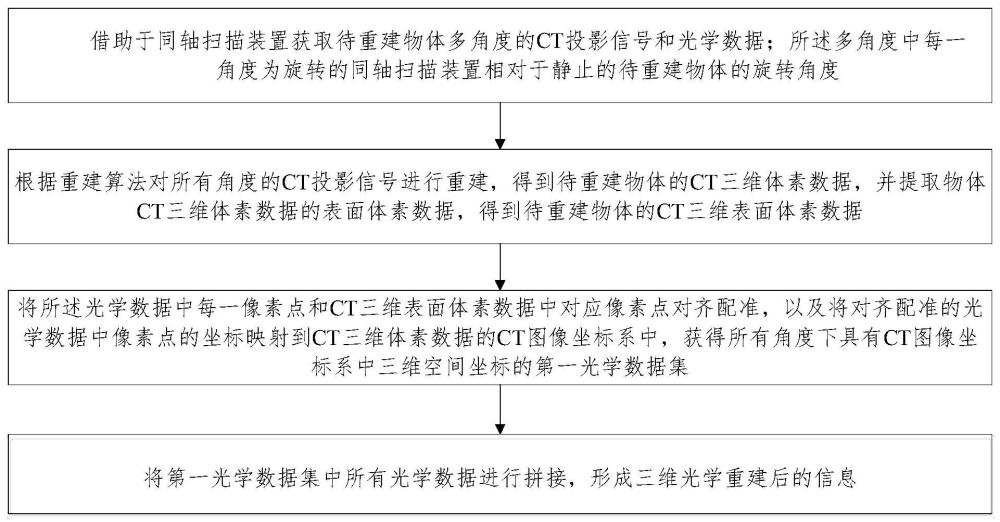
6、s10、借助于同轴扫描装置获取待重建物体多角度的ct投影信号和光学数据;所述多角度中每一角度为旋转的同轴扫描装置相对于静止的待重建物体的旋转角度;同轴扫描装置中固定有ct成像设备和与该ct成像设备具有安装夹角的光学成像设备;
7、s20、根据重建算法对所有角度的ct投影信号进行重建,得到待重建物体的ct三维体素数据,并提取物体ct三维体素数据的表面体素数据,得到待重建物体的ct三维表面体素数据;
8、s30、将所述光学数据中每一像素点和ct三维表面体素数据中对应像素点对齐配准,以及将对齐配准的光学数据中像素点的坐标映射到ct三维表面体素数据的ct图像坐标系中,获得所有角度下具有ct图像坐标系中三维空间坐标的第一光学数据集;
9、s40、将第一光学数据集中所有光学数据进行拼接,形成三维光学重建后的信息。
10、可选地,所述光学成像设备为高光谱成像设备,则所述光学数据为高光谱数据;
11、所述光学成像设备为荧光成像设备,则所述光学数据为荧光光学数据;
12、所述光学成像设备为rgb成像设备,则所述光学数据为rgb光学数据;
13、多角度的ct投影信号和光学数据包括:n个ct投影信号和n个光学数据;
14、其中,同轴扫描装置的旋转架每次相对物体转过角度为则同轴扫描装置相对物体转过360°时产生的数据个数为
15、可选地,所述s20中的根据重建算法对所有角度的ct投影信号进行重建,得到待重建物体的ct三维体素数据,包括:
16、对每一角度的ct投影信号进行预处理,采用滤波反投影算法对所有角度的预处理后的ct投影信号进行重建,得到待重建物体的ct三维体素数据。
17、可选地,采用滤波反投影算法对所有角度的预处理后的ct投影信号进行重建,得到待重建物体的ct三维体素数据,包括:
18、s21、对n个预处理后的ct投影信号分别进行一维傅里叶变换,得到n个频域中的第一投影信号;
19、s22、对n个频域中的第一投影信号进行滤波处理,得到滤波后的n个第二投影信号;
20、s23、将n个第二投影信号进行一维傅里叶逆变换,还原到时域,得到时域中的滤波后的n个第三投影信号;
21、s24、对每一个第三投影信号进行反投影,反投影是将每个角度下的投影信号按照各自的原投影路径,平均分配到经过物体的每一个点上,将所有角度下物体上同一点的反投影信号进行累加,得到物体各点的射线衰减系数,重建出物体的ct三维体素数据;
22、所述ct三维体素数据包括:重建物体ct图像中各体素的三维空间坐标以及各体素位置的hu值,该hu值反应了待重建物体对x射线的吸收程度。
23、可选地,所述s20中的提取物体ct三维体素数据的表面体素数据,得到待重建物体的ct三维表面体素数据,还包括:
24、s25、对所述ct三维体素数据进行优化处理,获得优化处理后的ct三维体素数据;
25、s26、对优化处理后的ct三维体素数据提取所述ct三维体素数据的表面信息;
26、s27、基于预先设定的体素数据阈值,将所述ct三维体素数据的表面信息划分为物体所属体素数据和背景所属体素数据;
27、s28、基于物体所属体素数据,采用遍历方式获取物体边界的体素数据;将物体所属体素数据中非物体边界的体素数据的hu值设置为0,得到物体的表面体素数据即ct三维表面体素数据。
28、可选地,所述s30包括:
29、同轴扫描装置相对物体旋转,每个成像位置的成像视角与物体夹角为ct成像设备与光学成像设备之间安装夹角为θ;
30、同轴扫描装置各成像设备坐标系为:坐标原点位于旋转架的中心轴且与成像设备光轴位于同一高度,坐标z轴由坐标原点指向各成像设备中心,x射线成像z轴由坐标原点指向x射线中心,xy平面垂直于z轴;
31、s31、针对每一个成像视角下的表面体素数据,选择xy平面为投影平面,沿着z轴负方向进行正交投影,将含有物体表面体素的三维数据(x,y,z,hu)投影到对应角度下的xy平面内,平面内的每个像素点为三维表面体素数据在投影平面上的投影位置,形成该角度下ct二维投影图像(x,y,hu);以获得所有成像视角下的ct二维投影图像;
32、s32、对于成像视角下的ct二维投影图像和成像视角下的光学数据进行特征检测,获得该ct二维投影图像和光学数据中各自显著的特征点;
33、s33、获取各自显著的特征点的特征描述子并进行匹配,获取超过预设阈值的匹配的特征点;
34、s34、根据匹配的特征点对,获取成像视角下的ct二维投影图像和成像视角下的光学数据的空间坐标转换映射;
35、s35、基于空间坐标转换映射将成像视角下的ct二维投影图像和成像视角下的光学数据进行配准;
36、基于所述s32至所述s35的方式,遍历所有成像视角将所有成像视角下ct二维投影图像和光学数据实现对齐配准。
37、可选地,所述s34包括:
38、s341、基于每个匹配的特征点对,将各成像设备所属的特征点的坐标除以该成像设备焦距获得归一化的特征点对坐标;
39、s342、基于归一化的特征点对坐标,构建一个线性方程;
40、设定p(x,y)和p’(x’,y’)是归一化的特征点对坐标;
41、p(x,y)对应ct二维投影图像,p’(x’,y’)对应光学数据;
42、通过线性方程p′tfp=0,确定基础矩阵,其中f为基础矩阵;
43、集合所有特征点对所构建的线性方程,求解基础矩阵;
44、s343、基于基础矩阵,使用ct成像设备和光学成像设备的内参进行三角测量,将归一化的特征点对坐标映射到世界坐标系中的三维点上;
45、s344、利用世界坐标系中归一化的特征点对映射的三维点坐标,获取所述空间坐标转换映射,该空间坐标转换映射包括平移矢量和旋转矩阵。
46、可选地,所述s34包括:
47、对每个角度下光学数据中的像素位置转换为配准后的ct二维投影图像坐标系统中的坐标;
48、建立光学数据中的像素与ct三维体素数据中的空间位置之间的对应关系,将每个角度下的光学数据中的像素信息对应到ct三维表面体素数据的空间位置上,获得所有角度下具有三维空间坐标的第一光学数据集。
49、可选地,所述s40包括:
50、采用所述s30方式遍历所有相邻的光学数据,将相邻光学数据进行配准,识别重叠区域,基于识别的重叠区域将第一光学数据集中所有光学数据进行拼接,形成三维光学重建后的信息;
51、对三维光学重建后的信息进行优化,得到完整的三维光学重建的信息。
52、第二方面,本发明还提供一种计算设备,包括:存储器和处理器,所述存储器中存储计算机程序,所述处理器执行所述存储器中的计算机程序,并执行上述第一方面任一所述的一种基于ct图像的三维光学重建方法的步骤。
53、(三)有益效果
54、本发明的三维光学重建方法,无需提前预先标定,受环境光影响小并且提高三维光学数据重建的精确度。ct图像具有较高的空间分辨率,能够提供物体的细微结构和准确的三维空间坐标,这使得基于ct图像的三维光学重建方法能够实现高精度的三维光学重建,准确还原物体的光学图像中的形状和几何结构,尤其适用于表面变化剧烈,即深度变化剧烈的物体的三维光学重建。
- 还没有人留言评论。精彩留言会获得点赞!