一种基于数字孪生的风机安装力学分析方法及系统
本发明涉及风机安装领域,特别是涉及一种基于数字孪生的风机安装力学分析方法及系统。
背景技术:
1、风能作为一种清洁的可再生能源越来越受到世界各国的重视。海上风电节约土地、资源量大,使得近海风力发电成为能源发展的重点领域之一,海上风力发电机的相关研究也随之成为海上工程领域的研究热点。为保证风机正常运行,顺利发电,须在设计期间对其构件,主要是杆件的变形与应力情况进行严密地模拟仿真,以评估并完善设计。随着计算机技术的发展,结构分析的计算机方法已日益成为主流。现有的结构力学求解器等计算软件可以完成结构的准确求解,但在面临复杂结构时,其求解效率往往不尽如人意;而当前复杂结构已数见不鲜。但现有技术无法分析风机支架复杂结构的变形与应力。
技术实现思路
1、本发明为了解决现有技术无法分析风机支架复杂结构的变形与应力的技术问题,本发明提出了一种基于数字孪生的风机安装力学分析方法及系统。
2、本发明的技术问题通过以下的技术方案予以解决:
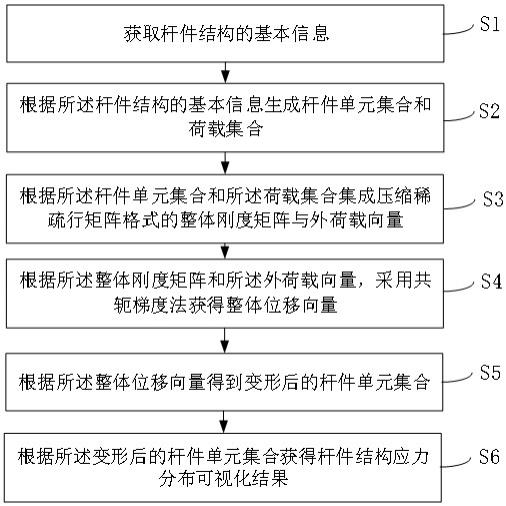
3、一种基于数字孪生的风机安装力学分析方法,包括如下步骤:
4、s1:获取杆件结构的基本信息;
5、s2:根据所述杆件结构的基本信息生成杆件单元集合和荷载集合;
6、s3:根据所述杆件单元集合和所述荷载集合集成压缩稀疏行矩阵格式的整体刚度矩阵与外荷载向量;
7、s4:根据所述整体刚度矩阵和所述外荷载向量,采用共轭梯度法获得整体位移向量;
8、s5:根据所述整体位移向量得到变形后的杆件单元集合;
9、s6:根据所述变形后的杆件单元集合获得杆件结构应力分布可视化结果。
10、在一些实施例中,所述杆件结构的基本信息包括:杆件结构中各个杆件单元的物理性能参数,杆件结构中各个杆件单元的摆放位置,杆件单元与杆件单元之间的连接方式以及杆件单元的约束方式,施加在杆件结构节点上的集中荷载信息。
11、在一些实施例中,所述杆件单元与杆件单元之间的连接方式和所述杆件单元的约束方式采用节点六自由度编码的方式表示,杆端自由度以节点六自由度的形式表示。
12、在一些实施例中,所述节点六自由度具有x、y、z以及rx、ry、rz六个不同的编号,分别用于表示节点沿x、y、z方向的3个平动以及绕x、y、z轴的3个转动;
13、刚性连接为两个节点六自由度的6个编号值完全相同,表明对应的杆端在此处刚性连接;
14、铰链连接为两个节点六自由度的代表平动的前3个编号值完全相同,代表转动的后3个编号值完全不同,表明对应的杆端在此处铰链连接;
15、所述节点六自由度满足以下规则:
16、当所述节点六自由度的某个自由度编号为预设的特殊值时,则表示该自由度编号的自由度被约束;
17、当两个节点六自由度在某个自由度上具有相同编号时,表明两个节点在此方向上必须具有相同位移或转角。
18、在一些实施例中,步骤s2中所述生成杆件单元集合的步骤如下:采用结构体系的数值化方法,对杆件结构的所有杆件构造对应的杆件单元,形成杆件单元集合,完成所有所述杆件单元的自由度编号后,所述杆件单元集合保存了杆件结构的所有信息。
19、在一些实施例中,步骤s3中所述外荷载向量的集成步骤如下:
20、a1:将所有节点上施加的外荷载分解成沿各个自由度方向的荷载分量;
21、a2:构造n维零向量f;
22、a3:将所有所述荷载分量按自由度对应的方式添加到所述n维向量f对应分量上,得到外荷载向量f。
23、在一些实施例中,步骤s3中所述整体刚度矩阵的集成步骤如下:
24、b1:计算局部单元刚度矩阵与坐标转换矩阵;
25、b2:计算全局单元刚度矩阵;
26、b3:按照自由度编号对应的规则将全局单元刚度矩阵的元素添加到元素全为0的n阶矩阵,得到整体刚度矩阵。
27、在一些实施例中,步骤s4具体包括:
28、根据压缩稀疏行矩阵格式的整体刚度矩阵和共轭梯度法求解整体位移线性方程组,得到整体位移向量,所述整体位移向量的表达式如下:
29、;
30、其中f为所有外加荷载组成的向量,为待求的所有位移或转角,k为整体刚度矩阵。
31、在一些实施例中,所述共轭梯度法包括以下步骤:
32、c1:初始化未知向量为迭代向量;
33、c2:计算剩余向量和前进方向;
34、c3:若所述置前进方向为零向量或所述剩余向量的模小于误差限值,则结束迭代,输出所述迭代向量;反之执行步骤c4;
35、c4:计算前进步长,更新所述迭代向量,计算更新所述迭代向量后的剩余向量;计算共轭系数,更新所述前进方向,之后执行步骤c3。
36、在一些实施例中,所述压缩稀疏行矩阵格式包括值列表v,列号列表c以及行起始索引列表rs;
37、其中,值列表v存储了矩阵中所有非0元素的值,满足行号小的元素在前,行号相同的元素则可任意放置;列号列表c与值列表v对应,存储了每个元素所在列的列号;行起始索引列表则按顺序存储了每一行元素在v中的最小索引。
38、在一些实施例中,步骤s5包括以下步骤:
39、s51:对每个杆件单元,按照自由度对应的方式从整体位移向量中提取出所述杆件单元的杆端全局位移向量;
40、s52:计算所述杆件单元的局部位移向量;
41、s53:将所述杆件单元沿轴向切分为有限多个杆件截面;
42、s54:计算局部坐标系下每个杆件截面中心的位移值并进行相应移动;
43、s55:将所述杆件截面重新连接,得到变形后的杆件单元。
44、在一些实施例中,步骤s6包括以下步骤:
45、s61:计算每个杆件单元局部坐标系下的杆端力;
46、s62:将所示杆件截面切分成有限多个扇形;
47、s63:计算所述扇形每个边缘角点处的应力值;
48、s64:根据所述应力值对所述杆件结构进行颜色标识,得到所述应力分布可视化结果;
49、s65:展示所述应力分布可视化结果。
50、本发明还提出了一种采用上述的基于数字孪生的风机安装力学分析方法的基于数字孪生的风机安装力学分析系统,其特征在于,包括:
51、结构生成模块:用于获取杆件结构的基本信息,生成杆件单元集合;
52、荷载管理模块:用于根据所述基本信息生成荷载集合;
53、结构求解模块:用于根据所述杆件单元集合和所述荷载集合集成整体刚度矩阵与外荷载向量,求解整体位移向量;
54、变形应力分析模块:用于根据所述整体位移向量计算结构的变形,获得变形后的杆件单元集合,计算结构应力分布,杆件端部的位移及受力,杆件内部指定位置处的位移及应力值均作为分析结果传递给结果展示模块;
55、结果展示模块:用于将所述分析结果可视化生成应力分布可视化结果,并展示所述应力分布可视化结果。
56、本发明与现有技术对比的有益效果包括:
57、本发明通过根据压缩稀疏行矩阵格式的所述整体刚度矩阵和所述外荷载向量,之后采用共轭梯度法求解整体位移向量,加速了矩阵的存储和求解效率,且不损失有效信息,从而兼顾计算精度的同时可有效提升计算效率,实现复杂大型结构的快速建模与计算。同时,本发明对结构体系的表示方法及结构求解方法,可推广应用至风机安装结构之外的任意杆系结构,具有良好的实用性和可扩展性。
58、本发明实施例中的其他有益效果将在下文中进一步述及。
- 还没有人留言评论。精彩留言会获得点赞!