一种基于特征一致性和空间一致性的点云精配准方法
本发明涉及计算机视觉,特别是指一种基于特征一致性和空间一致性的点云精配准方法。
背景技术:
1、有源点云目标点云其中,源点云和目标点云的点数不同,即nx≠ny。点云配准就是找到源点云和目标点云的重合点,即内点,计算内点间的旋转矩阵和平移向量。近年来,点云精配准方法可以分为传统方法和基于深度学习的方法。
2、传统方法以icp和ransac为代表,不断有icp变体算法和ransac变体算法出现,但是传统方法存在的共性问题是:仅能得到局部最优解和计算效率低。
3、随着近年来,深度学习技术的进步,越来越多的学者将目光放在深度学习方法上。2019年,wang提出dcp算法,通过dgcnn网络和注意力机制实现快速点云配准,但是无法解决点云配准中的离群点剔除问题。2021年,bai提出pointdsc方法,将空间一致性融入到特征提取中,可以实现离群点剔除,但是忽略了点云间的几何特征,导致点云配准的准确率低。
技术实现思路
1、本发明实施例提供了基于特征一致性和空间一致性的点云精配准方法,能够提高点云配准的准确率和速度。所述技术方案如下:
2、一方面,提供了一种基于特征一致性和空间一致性的点云精配准方法,该方法应用于电子设备,该方法包括:
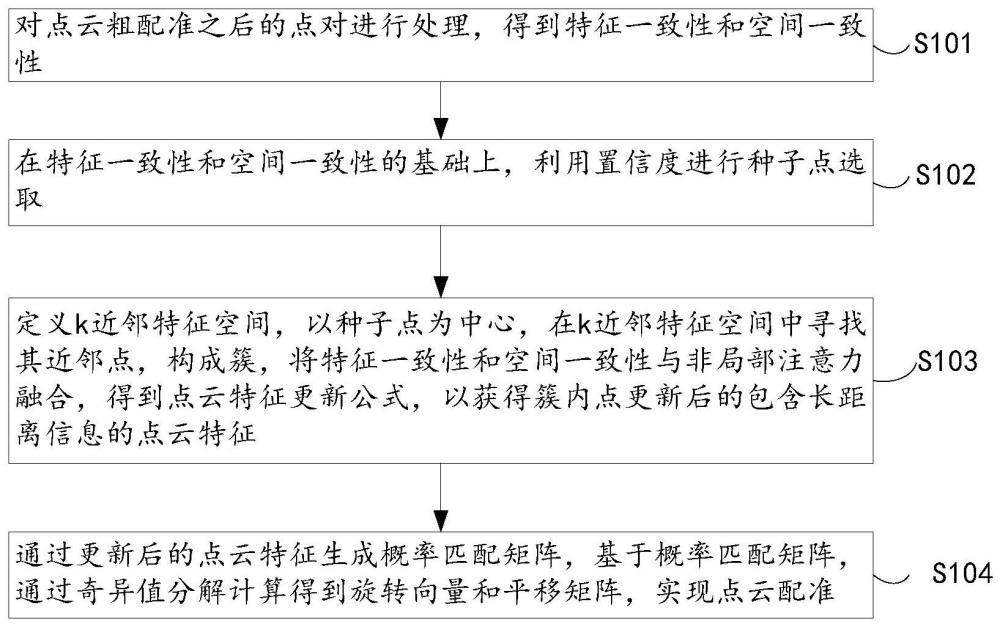
3、对点云粗配准之后的点对进行处理,得到特征一致性和空间一致性;
4、在特征一致性和空间一致性的基础上,利用置信度进行种子点选取;
5、定义k近邻特征空间,以种子点为中心,在k近邻特征空间中寻找其近邻点,构成簇,将特征一致性和空间一致性与非局部注意力融合,得到点云特征更新公式,以获得簇内点更新后的包含长距离信息的点云特征;
6、通过更新后的点云特征生成概率匹配矩阵,基于概率匹配矩阵,通过奇异值分解计算得到旋转向量和平移矩阵,实现点云配准。
7、进一步地,所述对点云粗配准之后的点对进行处理,得到特征一致性和空间一致性包括:
8、定义点对的特征差经过归一化后的值为α,α值反应了点对的特征一致性,α值越小,则特征越趋于一致,具体公式如下:
9、δfn=||g(xn)-g(yn)||
10、
11、αn∈α,n=1,2,...,n
12、其中,g(·)表示动态图卷积神经网络;xn和yn由sn分解而来,xn、yn和cn分别表示第n个源点云、第n个目标点云和第n个初始点对,初始点对由点云粗配准得到,n表示点对的总数目,即:表示6维实数空间,表示3维实数空间;δfn表示第n个点对的特征差;αn表示第n个点对的特征一致性;||·||表示欧几里得距离;[·]+是非负操作,表示αn值大于等于0;
13、定义每两组点对之间的点对空间距离差为β,β值反应了空间一致性,β值越小,则点对与点对间的空间位置特征越匹配,设第i组点对间的欧式距离为di,则第i组点对和第j组点对间的欧式距离差值dij为:
14、dij=||di-dj||
15、第i组点对和第j组点对间的空间一致性βij为:
16、
17、βij∈β,i=1,2,...,n,j==1,2,...,n。
18、进一步地,所述在特征一致性和空间一致性的基础上,利用置信度进行种子点选取包括:
19、定义种子置信度c为:
20、c=α+β
21、其中,α值反应了点对的特征一致性,β值反应了空间一致性;
22、将点对按照置信度c值由大到小排序,选择置信度排名前p%的点对作为种子点,其中,p为常数。
23、进一步地,所述定义k近邻特征空间,以种子点为中心,在k近邻特征空间中寻找其近邻点,构成簇,将特征一致性和空间一致性与非局部注意力融合,得到点云特征更新公式,以获得簇内点更新后的包含长距离信息的点云特征包括:
24、定义k近邻特征空间,以种子点为中心,在k近邻特征空间中寻找其近邻点,将种子点及其近邻点的索引记作index,其中,index是二维矩阵,其大小为[nseed,nk],nseed是种子点数量,nk是以种子点为中心的近邻点数量;种子点及其近邻点构成簇,若点在簇内,则认为其是内点,若点在簇外,则认为其是离群点;
25、将特征一致性和空间一致性与非局部注意力融合,得到k近邻特征空间中的点云特征更新公式为:
26、
27、其中,等号右侧的f为粗配准得到的初始点对坐标经过一层卷积后得到的点对特征;等号左侧的f为更新后的特征,mlp(·)为多层感知机模型,softmax(·)是激活函数,χ代表特征相似度,代表向量叉乘,h(·)为线性映射函数,α′是将α展开,即:
28、
29、其中,nc表示特征空间中的特征维度;
30、通过得到的点云特征更新公式,获得簇内点更新后的包含长距离信息的点云特征。
31、进一步地,所述通过更新后的点云特征生成概率匹配矩阵,基于概率匹配矩阵,通过奇异值分解计算得到旋转向量和平移矩阵,实现点云配准包括:
32、将更新后的点云特征进行l2归一化和非负操作,并计算其主特征值,得到概率匹配矩阵;
33、基于概率匹配矩阵,通过奇异值分解计算得到旋转向量和平移矩阵,实现点云配准。
34、进一步地,所述将更新后的特征进行l2归一化和非负操作,并计算其主特征值,得到概率匹配矩阵包括:
35、通过更新后的特征信息,生成概率匹配矩阵e:
36、e=l{m}
37、
38、其中,m由k近邻特征空间输出的更新后的点云特征f归一化得到,l{·}表示用幂迭代方法计算主特征向量,[·]+是非负操作,表示m值非负。
39、进一步地,通过奇异值分解计算得到的旋转向量r和平移矩阵t表示为:
40、
41、一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述基于特征一致性和空间一致性的点云精配准方法。
42、一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述基于特征一致性和空间一致性的点云精配准方法。
43、本发明实施例提供的技术方案带来的有益效果至少包括:
44、(1)在点云配准方面,针对传统方法容易陷入局部最优解的问题,本发明实施例提出了一种基于特征一致性和空间一致性的点云精配准方法,该方法能够快速、精准的给出旋转向量和平移矩阵,获得全局最优解。
45、(2)针对点云配准中,源点云和目标点云数量不同的低重叠率情况,以往算法很难处理离群点的问题,本发明实施例通过特征一致性和空间一致性,剔除离群点,并通过基于置信度的种子选取机制,筛选可以匹配的内点;这样,通过对点云粗配准之后的点对的处理,可以以较高准确率和较快的速度完成低重叠率情况下的点云配准。
46、(3)针对点云配准中,以往算法忽略点云间的拓扑信息问题,本发明实施例通过引入动态图卷积神经网络,获取点云间的几何信息;通过融合非局部注意力,获取包含长距离信息的点云特征,大大提高了点云配准的准确率。
- 还没有人留言评论。精彩留言会获得点赞!