本发明涉及光学检测设备,特别涉及一种平场校正的方法、平场校正系统及其计算机可读存储介质。
背景技术:
1、在相机生产过程中,由于自然制造公差,每个传感器的亮度输出都有一定程度的不均匀性,每个像素对相同数量的光的反应可能不同。使用面扫相机时,图像中亮度的差异不会产生太大的影响,因为整个图像中出现的差异很小。整体图像几乎不受影响,通常对于大多数应用程序来说已经足够了。但是,当使用线扫相机时,线扫相机的传感器高度只有几个像素,这意味着任何像素产生的错误将在同一位置的每次刷新中重复。例如,产生的图像错误可能会以垂直条纹的形式发生,会对记录的图像数据产生重大影响。
2、现有的线扫相机平场矫正方法,都是针对单帧图片进行矫正的,如果需要确保一次成功,则需要一个颜色绝对均匀的,尺寸大于相机视场的平场目标,这在实际操作过程中难以保障。
技术实现思路
1、本发明的目的是提供一种新的平场校正的方法,以解决现有平场校方法中平场目标难易保障足够的尺寸和均匀度等问题。
2、为达到上述目的,本发明在第一方面提出了一种平场校正的方法,包括:
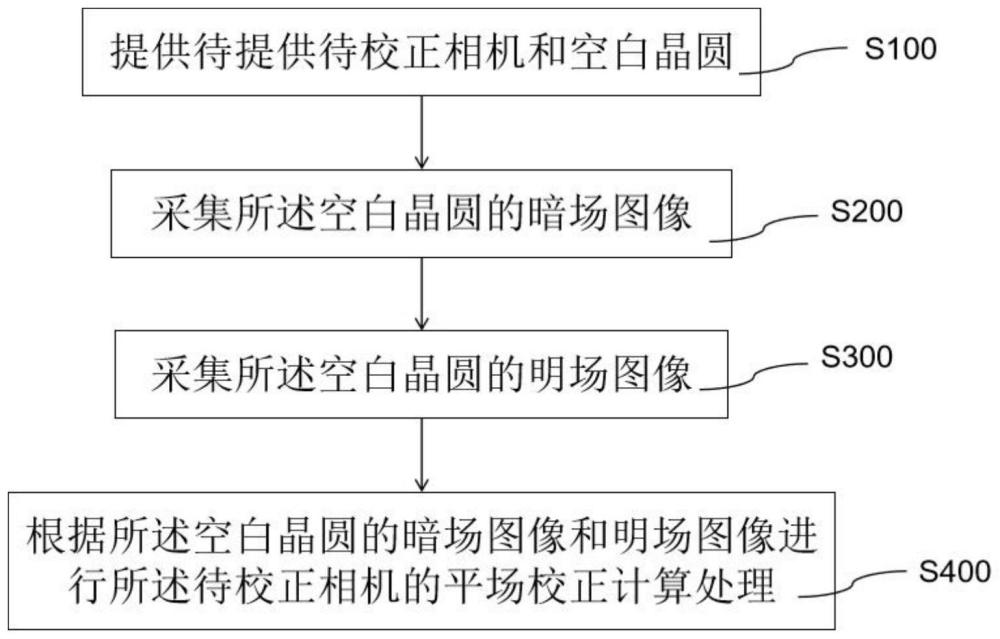
3、提供待校正相机和空白晶圆;
4、采集所述空白晶圆的暗场图像;
5、采集所述空白晶圆的明场图像;
6、根据所述空白晶圆的暗场图像和明场图像进行所述待校正相机的平场校正计算处理。
7、优选地,所述待校正相机为线扫相机。
8、优选地,采集所述空白晶圆的暗场图像的步骤包括:
9、在暗场条件下,分别采集所述空白晶圆在n个位置的表面图像,n≥1。
10、优选地,采集所述空白晶圆的明场图像的步骤包括:
11、在明场条件下,分别采集所述空白晶圆在m个位置处的表面图像,m≥3;
12、所述m个位置沿同一直线排列,且m个位置的空白晶圆能够完全覆盖所述待校正相机水平方向的视野大小。
13、优选地,所述明场条件为,无干扰光源,定标光源的亮度使得空白晶圆的灰度值在64~254之间。
14、优选地,采集的所述空白晶圆的表面图像的图片大小为w×h,其中,w为每一排的像素数,h为每一列的像素数。
15、优选地,所述平场校正计算处理包括:
16、统计所述暗场图像中每一列的灰度值p1和所述明场图像中每一列的灰度值p2;
17、根据所述明场图像的灰度值p2设定平场校正目标值t;
18、根据所述暗场图像每一列的灰度值p1和所述平场校正目标值t,计算每一列的校正系数k。
19、优选地,利用每一列的校正系数k校正待校正图片中每一个像素点;
20、统计验证校正后的灰度值分布是否均匀。
21、优选地,统计所述暗场图像中每一列的灰度值p1的方法包括:取每一列像素点中,灰度值位于暗场阈值统计范围内的所有值的众数,平均数或者中位数为这一列的灰度值p1。
22、优选地,统计所述明场图像中每一列的灰度值p2的方法包括:取每一列像素点中,灰度值位于明场阈值统计范围内的所有值的众数,平均数或者中位数为这一列的灰度值p2。
23、优选地,所述暗场阈值统计范围为(0,5)。
24、优选地,所述暗场阈值统计范围为(64,254)。
25、优选地,所述根据所述明场图像的灰度值p2设定平场校正目标值t的步骤包括:
26、设定所述明场图像的所有列的灰度值p2的平均值,中位数或者众数为所述平场校正目标值t;
27、或者,根据具体需求或者经验值设定。
28、优选地,计算每一列的校正系数k的方法包括:
29、根据所述暗场图像中第n列的灰度值p1n和所述明场图像中第n列的灰度值p2n,求出第n列的校正系数kn=t/(p2-p1),n∈(0,w)。
30、优选地,所述利用每一列的校正系数k校正待校正图片中每一个像素点的方法包括:对于每个位置的灰度值p和对应列的校正系数kn,利用公式p’=(p-p1)*kn求取每一个像素点的校正值p’。
31、优选地,所述统计验证校正后的灰度值分布是否均匀的方法包括:
32、统计每一列中每一个像素点的校正值pn’的众数,平均数或者中位数为这一列矫正后的灰度值gn;
33、计算所有列的校正后的灰度值gn的标准差s;
34、若s小于设定标准差,则判断为校正后的灰度值分布均匀,得到系数p1和k,完成了平场矫正。
35、另一方面,本发明还提供了一种平场校正系统,其包括:
36、图像获取模块,适于采集空白晶圆的暗场图像和明场图像;
37、平场校正计算处理模块,适于根据所述空白晶圆的暗场图像和明场图像进行所述待校正相机的平场校正计算处理。
38、优选地,所述图像获取模块包括:晶圆承载运动单元,适于提供不同的晶圆承载位置。
39、优选地,所述晶圆承载运动模块适于承载晶圆进行水平平移。
40、优选地,所述平场校正计算处理模块包括:
41、列灰度值统计单元,适于统计所述暗场图像中每一列的灰度值p1和所述明场图像中每一列的灰度值p2;
42、平场校正目标值设定单元,适于根据所述明场图像的灰度值p2设定平场校正目标值t;
43、校正系数计算单元,适于根据所述暗场图像每一列的灰度值p1和所述平场校正目标值t,计算每一列的校正系数k;
44、像素点校正单元,适于利用每一列的校正系数k校正每一个像素点;
45、校正验证单元,适于统计验证校正后的灰度值分布是否均匀。
46、再一方面,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上任意一项所述的平场校正的方法。
47、由于上述方案的运用,本发明与现有技术相比具有以下优点和效果:
48、本发明的技术方案中,采用空白晶圆作为平场校正的目标物,所述空白晶圆在生产过程中,处于无尘环境中,不容易被污染,晶圆表面灰度一致性极高。且空白晶圆作为半导体工艺加工对象,在半导体加工测试环境中,易于获取,具有精准夹持和移动晶圆的设备,适配实际生产加工过程的标准化。
49、进一步的,本发明的技术方案中,所述多幅明场图像完全覆盖所述待校正相机水平方向的视野大小,在图像采集完成后,可以一次计算出全部的校正系数。避免了传统的平场校正方法中需要分段做平场,容易在分段处存在明显的边界的问题。
50、进一步的,本发明的技术方案中,采集所述空白晶圆的多幅暗场图像和明场图像作为校正系数计算的基础,与传统技术相比,计算校正系数的数据量比较多,能够获得较为精确的校正系数。
51、进一步的,本发明的技术方案中,用完整的明场图像或者暗场图像作为校正系数计算的基础,完整的明场图像或者暗场图像包括线扫相机多行像素点,增加了计算处理的数据量,且统计数据过程,通过设置统计阈值,能够较好的避免一些污染带来的数据异常。
52、进一步的,本发明的技术方案中,设置合适的平场校正目标值,能够在一个更广的光学环境中,都能达到较高的灰度一致性。