一种十字轴万向节传动装置的传动优化方法、装置及终端与流程
本发明公开了一种十字轴万向节传动装置的传动优化方法、装置及终端,属于汽车传动。
背景技术:
1、十字轴式万向节,因其结构简单,传动可靠,效率高,且允许两传动轴之间有较大的夹角,故被广泛应用于汽车转向系统的传动机构中。通过将两个十字轴万向节串联,调节万向节的节叉的相位角,找到最优相位角,可使十字轴万向节的传动波动达到很小。但由于十字轴式万向节具有不等速性,因此在传动过程中会导致传动部件产生扭转振动,从而产生附加的交变载荷,即影响零部件的疲劳寿命,也影响车辆的操控性。现有的研究理论虽然已经给出了2个十字轴万向节传动机构转速波动的计算方法,但面对结构更加复杂的3十字轴式万向节传动机构时,则缺乏理论支撑,仅能依靠排列组合的方式从几组备选布置方案中寻找相对较优的解析,这在一定程度上限制了性能优化的上限。
技术实现思路
1、针对现有技术的缺陷,本发明提出一种十字轴万向节传动装置的传动优化方法、装置及终端,解决面对结构更加复杂的3十字轴式万向节传动机构时,缺乏理论支撑,仅能依靠排列组合的方式从几组备选布置方案中寻找相对较优的解析,一定程度上限制了性能优化上限的问题。
2、本发明的技术方案如下:
3、根据本发明实施例的第一方面,提供一种十字轴万向节传动装置的传动优化方法,所述方法包括以下步骤:
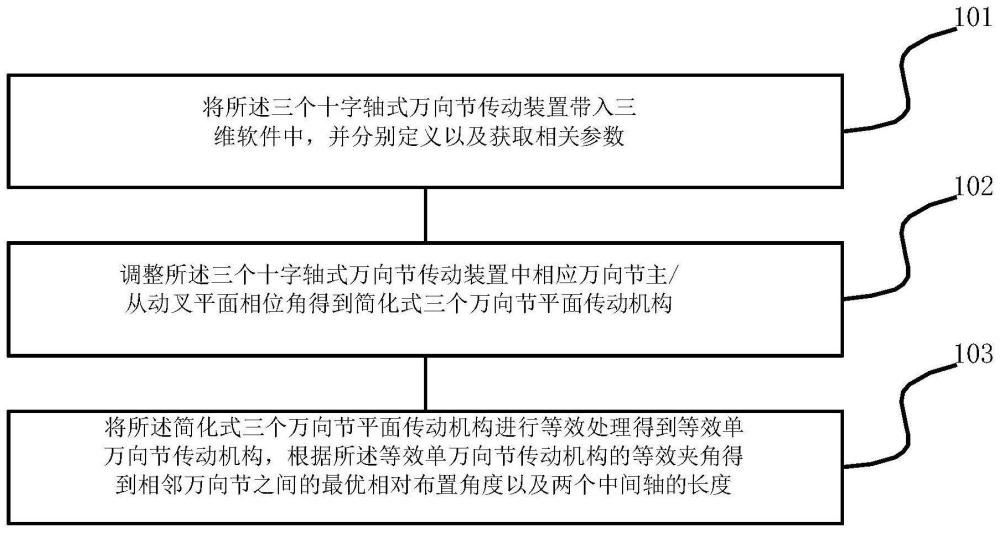
4、将所述三个十字轴式万向节传动装置带入三维软件中,并分别定义以及获取相关参数;
5、调整所述三个十字轴式万向节传动装置中相应万向节主/从动叉平面相位角得到简化式三个万向节平面传动机构;
6、将所述简化式三个万向节平面传动机构进行等效处理得到等效单万向节传动机构,根据所述等效单万向节传动机构的等效夹角得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度。
7、优选的是,所述定义以及获取相关参数,包括:
8、定义相关参数,包括:
9、沿着运动传递方向定义四根轴分别为:输入轴、第一中间轴、第二中间轴和输出轴,沿着运动传递方向定义三个十字轴万向节分别为:第一万向节、第二万向节和第三万向节,由所述第一万向节连接的两段传动轴所确定的第一平面,由第二万向节连接的两段传动轴所确定的第二平面,由第三万向节连接的两段传动轴确定的第三平面c;
10、获取相关参数,包括:
11、所述输入轴与第一中间轴之间的夹角、第一中间轴与第二中间轴之间的夹角、第二中间轴与输出轴之间的夹角、第一平面与第二平面之间的夹角、第二平面与第三平面之间的夹角、所述第二万向节的主动叉平面相对于第一万向节的从动叉平面之间的第一相位角和第三万向节的主动叉平面相对于第二万向节的从动叉平面之间的第二相位角;
12、其中,所述第一相位角和第二相位角初始状态下为0°。
13、优选的是,其特征在于,所述调整所述三个十字轴式万向节传动装置中相应万向节主/从动叉平面相位角得到简化式三个万向节平面传动机构,包括:
14、将所述第一万向节的从动叉平面旋转至与第一平面平行的位置,将所述第二万向节的主动叉平面旋转至与第二平面平行的位置,将所述第三万向节的主动叉平面旋转至与第三平面垂直的位置;
15、将所述第二中间轴围绕第一中间轴旋转至与第一平面共面,将所述输出轴围绕第二中间轴旋转至与第一平面共面,再将所述第一相位角和第二相位角复位至初始值0°得到简化式三个万向节平面传动机构。
16、优选的是,其特征在于,所述将所述简化式三个万向节平面传动机构进行等效处理得到等效单万向节传动机构,根据所述等效单万向节传动机构的等效夹角得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度,包括:
17、将所述简化式三个万向节平面传动机构中的第一万向节的主动叉平面转至垂直位置,且十字轴平面与所述主动轴轴线垂直,将此时位置设为第一极限位置,将所述简化式三个万向节平面传动机构中的第一万向节的主动叉平面转至水平位置,且十字轴平面与所述从动轴轴线垂直,将此时位置设为第二极限位置;
18、根据所述第一极限位置、第二极限位置、输入轴与第一中间轴之间的夹角、第一中间轴与第二中间轴之间的夹角和第二中间轴与输出轴之间的夹角得到等效单万向节传动机构的等效夹角,所述等效单万向节传动机构的等效夹角如下公式(1)所示:
19、λ2=[(α2-β2+γ2) 2]1/2 (1)
20、其中:λ为等效夹角,α为输入轴与第一中间轴之间的夹角,β为第一中间轴与第二中间轴之间的夹角,γ为第二中间轴与输出轴之间的夹角;
21、当β>α,β>γ时,公式(1)中的等效单万向节传动机构的等效夹角等于第一等效单万向节传动机构第一等效夹角,第一等效夹角取得最小值,调整所述第一中间轴和第二中间轴的空间布置角度或长度,直到当α2+γ2与β2值相等,所述第一等效夹角值趋近于0°,得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度;
22、当α>β,α>γ时,将所述第三万向节的主动叉平面相对于第二万向节的从动叉平面旋转90°,公式(1)中的等效单万向节传动机构的等效夹角等于第二等效单万向节传动机构的第二等效夹角,所述第二等效夹角的值如下公式(2)所示:
23、λ22=[(α2-β2-γ2) 2]1/2 (2)
24、此时所述第二等效夹角取得最小值,调整所述第一中间轴和第二中间轴的空间布置角度或长度,直到当α2+γ2与β2值相等,所述第二等效夹角值趋近于0°,得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度;
25、当γ>α,γ>β时,将所述第二万向节的主动叉平面相对于第一万向节的从动叉平面转过90°,公式(1)中的等效单万向节传动机构的等效夹角λ等于第三等效单万向节传动机构的第三等效夹角,所述第三等效夹角的值如下公式(3)所示:
26、λ32=[(α2+β2-γ2) 2]1/2 (3)
27、所述第三等效夹角取得最小值,调整所述第一中间轴和第二中间轴的空间布置角度或长度,直到当α2+γ2与β2值相等,所述第三等效夹角值趋近于0°,得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度。
28、根据本发明实施例的第二方面,提供一种十字轴万向节传动装置的传动优化装置,所述装置包括:
29、参数模块,用于将所述三个十字轴式万向节传动装置带入三维软件中,并分别定义以及获取相关参数;
30、简化模块,用于调整所述三个十字轴式万向节传动装置中相应万向节主/从动叉平面相位角得到简化式三个万向节平面传动机构;
31、等效模块,用于将所述简化式三个万向节平面传动机构进行等效处理得到等效单万向节传动机构,根据所述等效单万向节传动机构的等效夹角得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度。
32、优选的是,所述简化模块,用于:
33、将所述第一万向节的从动叉平面旋转至与第一平面平行的位置,将所述第二万向节的主动叉平面旋转至与第二平面平行的位置,将所述第三万向节的主动叉平面旋转至与第三平面垂直的位置;
34、将所述第二中间轴围绕第一中间轴旋转至与第一平面共面,将所述输出轴围绕第二中间轴旋转至与第一平面共面,再将所述第一相位角和第二相位角复位至初始值0°得到简化式三个万向节平面传动机构。
35、优选的是,所述等效模块,用于:
36、将所述简化式三个万向节平面传动机构中的第一万向节的主动叉平面转至垂直位置,且十字轴平面与所述主动轴轴线垂直,将此时位置设为第一极限位置,将所述简化式三个万向节平面传动机构中的第一万向节的主动叉平面转至水平位置,且十字轴平面与所述从动轴轴线垂直,将此时位置设为第二极限位置;
37、根据所述第一极限位置、第二极限位置、输入轴与第一中间轴之间的夹角、第一中间轴与第二中间轴之间的夹角和第二中间轴与输出轴之间的夹角得到等效单万向节传动机构的等效夹角,所述等效单万向节传动机构的等效夹角如下公式(1)所示:
38、λ2=[(α2-β2+γ2) 2]1/2 (1)
39、其中:λ为等效夹角,α为输入轴与第一中间轴之间的夹角,β为第一中间轴与第二中间轴之间的夹角,γ为第二中间轴与输出轴之间的夹角;
40、当β>α,β>γ时,公式(1)中的等效单万向节传动机构的等效夹角等于第一等效单万向节传动机构第一等效夹角,第一等效夹角取得最小值,调整所述第一中间轴和第二中间轴的空间布置角度或长度,直到当α2+γ2与β2值相等,所述第一等效夹角值趋近于0°,得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度;
41、当α>β,α>γ时,将所述第三万向节的主动叉平面相对于第二万向节的从动叉平面旋转90°,公式(1)中的等效单万向节传动机构的等效夹角等于第二等效单万向节传动机构的第二等效夹角,所述第二等效夹角的值如下公式(2)所示:
42、λ22=[(α2-β2-γ2) 2]1/2 (2)
43、此时所述第二等效夹角取得最小值,调整所述第一中间轴和第二中间轴的空间布置角度或长度,直到当α2+γ2与β2值相等,所述第二等效夹角值趋近于0°,得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度;
44、当γ>α,γ>β时,将所述第二万向节的主动叉平面相对于第一万向节的从动叉平面转过90°,公式(1)中的等效单万向节传动机构的等效夹角λ等于第三等效单万向节传动机构的第三等效夹角,所述第三等效夹角的值如下公式(3)所示:
45、λ32=[(α2+β2-γ2) 2]1/2 (3)
46、所述第三等效夹角取得最小值,调整所述第一中间轴和第二中间轴的空间布置角度或长度,直到当α2+γ2与β2值相等,所述第三等效夹角值趋近于0°,得到相邻万向节之间的最优相对布置角度以及两个中间轴的长度。
47、根据本发明实施例的第三方面,提供一种终端,包括:
48、一个或多个处理器;
49、用于存储所述一个或多个处理器可执行指令的存储器;
50、其中,所述一个或多个处理器被配置为:
51、执行本发明实施例的第一方面所述的方法。
52、根据本发明实施例的第四方面,提供一种非临时性计算机可读存储介质,当所述存储介质中的指令由终端的处理器执行时,使得终端能够执行本发明实施例的第一方面所述的方法。
53、根据本发明实施例的第五方面,提供一种应用程序产品,当应用程序产品在终端在运行时,使得终端执行本发明实施例的第一方面所述的方法。
54、本发明的有益效果在于:
55、本发明提供一种十字轴万向节传动装置的传动优化方法、装置及终端,通过从单个十字轴式万向节的运动特性着手,在引入等效夹角概念的基础上,推导多十字轴式万向节的运动特性和转速波动的计算方法,得出十字轴式万向节转向传动机构的设计优化方法,以消除转速波动,提高零件疲劳寿命,改善车辆操控性。
56、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!