一种基于改进YOLO算法的伪装目标检测方法
本发明属于人工智能算法领域,具体为一种基于改进yolo算法的伪装目标检测方法。
背景技术:
1、在目标检测领域,yolo(you only look once)算法是一种具有高效性和实时性的流行算法,它在各种场景中都表现出了优越的性能,尤其是在伪装目标的检测方面,主要从以下几个方面展开:
2、1细粒度目标的检测:
3、yolo算法可以准确地检测出细粒度的目标,如行人车辆等,而在这些目标的伪装版本中,这种准确性同样可以得到保持;
4、2.实时性
5、yolo算法具有快速的计算速度,可以在实时系统中实现目标检测,这是因为yolo算法采用了前向传递的方式进行计算,减少了重复计算和迭代,提高了算法的效率;
6、3.多尺度检测
7、在多尺度检测方面,yolo算法通过使用不同尺度的卷积核来提取不同尺度的特征,从而能够同时检测不同尺度的目标,这种多尺度检测能力使得yolo算法能够在处理大小不一、尺度不同的伪装目标时表现良好的性能;
8、针对以上特性,在无人机巡检领域中,无人机常规巡检扫描可通过多种伪装来降低被发现的概率,其主要体现在以下几个方面:
9、1.伪装会干扰无人机的图像采集和数据处理过程,导致目标识别和定位的准确性下降,伪装可能使目标难以被识别或被误判为其他物体。
10、2.测量精度:无人机扫描的精度会受到伪装的影响,当目标被伪装覆盖时,扫描数据可能不准确,导致测量误差增大,这些误差可能影响后续的分析和处理过程。
11、现有技术中公开号为cn114694042a的发明专利——一种基于改进scaled-yolov4的伪装人员目标检测方法中记载了关于通过网络结构的优化可以增强伪装目标的特征图,提升了对树林中伪装目标图像中多尺度目标的检测精度的效果,然而该网络结构需要将图像中的所有位置均进行多次判断,才能达到精确检测的效果;
12、本发明致力于在保证检测精度的基础上,提升对检测速度与效率的算法,使无人机搭载的检测系统所需求的硬件需求更低,使其使用成本受到更精确的控制,满足更加广泛的检测需求
技术实现思路
1、本发明的目的在于:为了降低无人机搭载的检测系统对于伪装目标的识别硬件需求,并进一步增强识别速度的问题,提供一种基于改进yolo
2、算法的伪装目标检测方法。
3、本发明采用的技术方案如下:
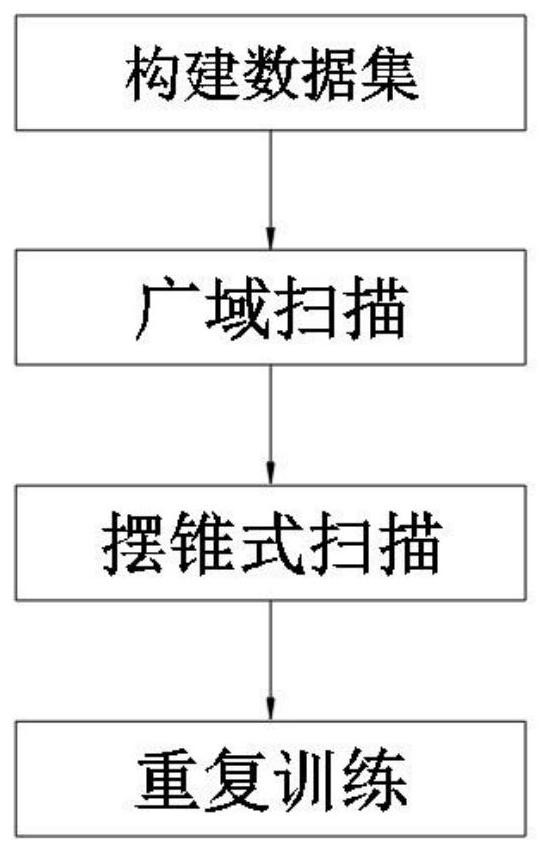
4、一种基于改进yolo算法的伪装目标检测方法,包括以下步骤:
5、(1)构建数据集:伪装设备的偏振成像数据集;
6、(2)广域扫描:所述的广域扫描层可对偏振成像伪装数据集内大范围图像中标记伪装目标;
7、(3)摆锥式扫描:采用无人机悬空姿态上的摆锥形扫描设备,对大范围图像的伪装目标区域多次重复识别,多次重复识别结果用来加权伪装目标的权重;
8、(4)重复训练:采用偏振成像伪装数据集合训练伪装设备目标模型,多次重复训练直至伪装设备目标模型的检测位置的参数趋近于相同。
9、其中,步骤(1)中,采用配备摆锥式扫描相机的无人机,对目标区域采集图片图像数据,提取得到图片图像数据中伪装目标的特征图;
10、步骤(2)中,对特征图中的伪装目标范围的位置信息参数进行网格化采集,并获得伪装目标位置信息参数网格的参数;
11、步骤(3)中,将伪装目标位置信息参数网格的参数输入无人机扫描设备中,将摆锥式扫描设备的扫描路径与伪装目标位置信息参数进行重叠,得到摆锥式扫描设备中扫描路径上伪装目标的扫描参数;
12、步骤(4)中,在摆锥式扫描路径中的扫描参数上的区域的图片图像数据进行重新识别,并进一步多次检测,得到摆锥式扫描路径中伪装设备位置参数,将各位置参数进行对比,直至检测位置的参数趋近于相同。
13、其中,步骤(1)具体包括:
14、(11)对图片数据进行预处理,将抽出的图像样本进行数据清洗;
15、(12)通过设定数据质量阈值,将不符合要求的数据进行过滤,使空值、错误值、异常值数据受到过滤,只保留符合要求的数据。
16、其中,步骤(2)具体包括:
17、(21)建立网格:将输入的原始图片按照一定的比例缩小,然后在缩小后的图片上建立一个网格;
18、(22)确定单元格中心点坐标:对于每个单元格,确定其中心点坐标;
19、(23)计算特征:根据每个单元格的中心点坐标和其他信息,计算出单元格的若干个特征;
20、(24)确定目标框的位置和大小:根据单元格的特征,确定是否存在目标物体,如果存在,则进一步确定目标物体在单元格中的位置和大小;
21、(25)框出目标物体:根据目标物体在单元格中的位置和大小,将目标物体框出来,并输出框的位置和大小信息;
22、(26)进行目标检测:将框出的目标物体输入到yolo模型中进行目标检测,输出检测结果并标记为伪装目标。
23、其中,步骤(3)具体包括:
24、(31)建立坐标参数:将输入的原始图片按照与步骤(21)中相同的比例缩小,然后在缩小后的图片上建立一个螺旋线坐标系;
25、(32)确定重叠点坐标:将步骤(26)中的伪装目标的坐标映射到螺旋线坐标系中,确定其映射坐标;
26、(33)计算特征:根据映射坐标控制步骤(3)中的摆锥式扫描设备的扫描参数,控制摆锥式扫描设备在映射坐标上采集映射图像;
27、(34)确定复数次目标检测:将映射图像输入到yolo模型中进行目标检测,输出检测结果并标记图像为权重参数。
28、其中,步骤(4)具体包括:
29、通过交叉熵损失,用于位置参数的类别预测,加上平方差损失,用于位置参数的具体预测;
30、对于每个边界框和每个类别,都有一个单独的交叉熵损失和一个单独的平方差损失;
31、交叉熵损失的计算公式为:
32、l_class=-sum(y_true[class]*log(y_pred[class]))
33、其中,y_true[class]是真实标签中对应类别的概率,y_pred[class]是模型预测的对应类别的概率;
34、位置损失的计算公式为:
35、l_coord=sum((x_true-x_pred)^2/(2s^2))+sum((y_true-y_pred)^2/(2s^2))
36、其中,(x_true,y_true)是真实标签中的边界框中心坐标,(x_pred,y_pred)是模型预测的边界框中心坐标,s是调整尺度。
37、总损失l是所有类别和位置损失的加权和:
38、l=sum(lambdal_class+lambdal_coord)
39、其中,lambdal是类别损失和位置损失的权重,用于调节两者的重要性。
40、其中,步骤(12)中
41、data_quality是数据质量阈值的设定值:
42、data_quality_threshold=(dataset_size/total_samples)*complexity_factor
43、其中:
44、dataset_size是数据集中所有样本的总数量;
45、total_samples是用于训练的样本总数;
46、complexity_factor是一个调整因子,根据数据集的复杂性进行调整。
47、综上所述,由于采用了上述技术方案,本发明的有益效果是:
48、1、本发明中,针对于无人机悬浮时螺旋线形精细扫描的特征,将传统的yolo算法计算结果与螺旋线形扫描特征相结合,设计了全新的扫描特征,实现了对无人家伪装目标的快速扫描识别,保证扫描精度的同时降低了计算需求,从而进一步降低对设备计算能力的硬件需求,实现无人机识别上的成本控制的效果。
- 还没有人留言评论。精彩留言会获得点赞!