基于证据理论和多点线性化的结构可靠性分析方法
本发明涉及结构或产品可靠性分析,尤其是涉及采用证据理论对结构可靠度灵敏度进行分析方面,具体涉及一种基于证据理论和多点线性化的结构可靠性分析方法、装置、计算机设备及存储介质。
背景技术:
1、在实际工程问题中,不可避免的存在着材料特性、结构几何参数、边界条件、初始条件、测量误差等不确定性因素。这些因素绝大部分引起的不确定性程度是非常小的,然而当多个不确定性因素叠加在一起时,不确定性被放大,因而可能会引起结构的失效。因此,在进行产品以及结构的设计中,一定要对存在的各种不确定性因素进行分析,充分考虑不同的不确定性所起到的作用,然后在对结构容易遭到破坏的位置进行不确定性可靠性分析。在传统的结构可靠性分析中,必须要掌握结构一定的信息和数据,但是在实际工程应用中有很多不确定因素被简单地作为确定性来处理,这样就会导致对结构的可靠性分析结果过于保守,材料的浪费以及结构的重量过于沉重。证据理论对认知不确定性有着很强的处理能力,它仅仅利用已获得的信息而不需要额外的假设就能够对存在的不确定性进行估量化,而且通过采用合成规则可以灵活处理多个来源的区间不确定性。证据理论采用可信度和似真度两个测量标准可以实现对精确概率上下限的量化。证据理论在不同情况下可分别等效于概率理论、区间分析理论、模糊理论等。
2、多点线性化方法是通过找到极限状态面上的多个切点即线性化点,并在线性化点处进行一阶泰勒展开得到的多个超平面近似原极限状态函数。将复杂的非线性问题简化为一系列的线性问题,使得问题更容易处理,提高计算效率。
3、因此,将基于证据理论和多点线性化的结构可靠性分析方法用于结构可靠性分析,对土木工程、机械电子、航空航天等领域结构或产品可靠度评估领域中采用高效的证据理论分析方法进行结构可靠性及其灵敏度分析方面具有重要意义。
技术实现思路
1、本发明的目的是为了解决现有技术中的上述缺陷,提供一种基于证据理论和多点线性化的结构可靠性分析方法、装置、计算机设备及存储介质。
2、本发明的第一个目的在于公开一种基于证据理论和多点线性化的结构可靠性分析方法,所述结构可靠性分析方法包括以下步骤:
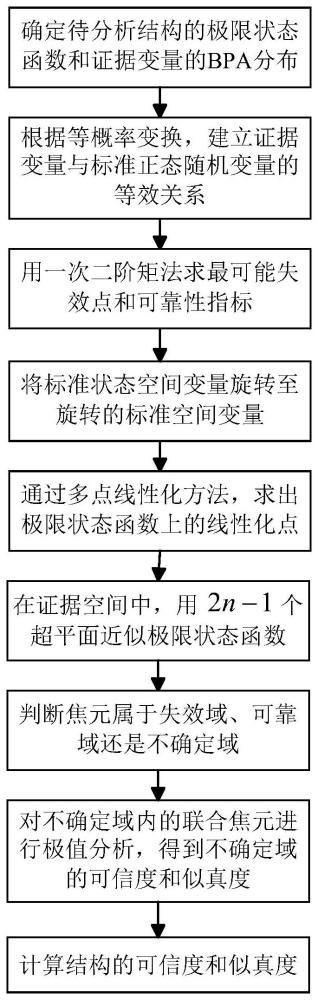
3、s1、指定待分析领域中反映结构或产品的正常工作能力或安全工作临界状态的极限状态函数g(x),其中,x=[x1,x2,…,xi,...,xn],xi为第i维不确定证据变量,n为问题维数,根据工程经验或权威专家信息,构建不确定证据变量xi的识别框架、单个变量xi的基本可信度分配函数mi(xi)、联合焦元ax和联合基本可信度分配函数其中,基本可信度分配函数mi(xi)反映了该证据命题为真实的信任程度,为一个在[0,1]之间的基本概率数。
4、s2、根据等概率变换,建立不确定证据变量xi与不确定证据变量xi对应的标准正态分布变量yi之间的等效关系:xi=(φ(yi)-mi(ai,1)-…-mi(ai,j-1))×(ui,j-li,j)/mi(ai,j)+li,j,其中,φ(yi)是标准正态分布yi的累积概率分布函数,ai,j是不确定证据变量xi的第j个焦元,mi(ai,j)是ai,j的基本可信度分配函数,焦元ai,j=[li,j,ui,j],j=1,2,…,li,j和ui,j分别对应焦元ai,j的下界和上界,焦元ai,j是一个区间,并非指代某一点。
5、s3、根据一次二阶矩方法求得到最可能失效点y*、可靠度指标β和最可能失效点y*处的单位向量αy,将y*按等概率变换转换到原证据空间得到原始空间的最可能失效点x*;
6、s4、采用正交化方法,以αy构造一个正交矩阵r,正交矩阵r的第n列为单位向量αy,通过旋转变换y'=ry将标准正态空间中的变量y变换到旋转标准正态空间的变量y';
7、s5、在旋转标准正态空间中分别沿第i=1、2、…、n-1找线性点,其中每个维度都可确定极限状态面上2个线性化点y′i+和y′i-,从而找到2(n-1)个线性化点,将旋转标准正态空间中线性化点y′i+和y′i-转换到原始证据空间中线性化点x'i+和x'i-;
8、s6、在证据空间中,在最可能失效点x*和2(n-1)个线性化点x'i+和x'i-,使用一阶泰勒展开式近似真实极限状态函数g(x),得到2n-1个近似超平面:
9、
10、
11、
12、其中,符号表示求函数的梯度;
13、s7、划分焦元所属绝对失效域、绝对安全域和不确定域,划分规则如下:若第p个联合焦元axp中心点cp与超平面和的距离大于焦元半径,且则该焦元属于失效域s1;若第p个联合焦元ax中心点cp与超平面和的距离大于焦元半径,且和则该焦元属于安全域s2;其余情况焦元皆属于不确定域s3;
14、s8、对不确定域s3内的每个联合焦元进行极值分析,确定不确定域s3内的可信度bel(s3)与似真度pl(s3);
15、s9、计算结构的可信度与似真度:结构的可信度bel(g)与似真度pl(g)由安全域和不确定域的可信度与似真度相加:bel(g)=bel(s2)+bel(s3)、pl(g)=pl(s2)+pl(s3),其中,安全域s2的可信度和似真度
16、进一步地,所述待分析领域为包括土木工程、机械电子或航空航天在内领域的结构或产品可靠度分析评估。
17、进一步地,所述步骤s5中在旋转标准正态空间中分别沿第i=1、2、…、n-1找线性点。为了开展这一过程,设初始值i=1,旋转标准正态空间矢量y'=(0,0,…,0),初始试算取值ki=0.25,并且ki+=ki-=ki。
18、进一步地,所述步骤s5中假设y'i+和y'i-的初始值分别为在旋转标准正态空间中沿着第i个维度正、负方向分别确定两个不同的线性化点。
19、进一步地,所述步骤s5中,分别对于y'i+和y'i-,随机选取η1、η2,令η1=β+1、η2=β-1,y'i+和y'i-最后一个分量分别取η1和η2,得到两个插值点,在原证据空间计算这两个插值点极限状态函数值g1、g2,为线性搜索极限状态曲面上的零点做准备。
20、进一步地,所述步骤s5中,计算y'i+和y'i-分别对应的插值点和在证据空间的对应极限状态函数值g3。通过使用两个插值点线性插值求得极限状态曲面上的近似零点。
21、进一步地,所述步骤s5中,η1=η2、η2=η3、g1=g2、g2=g3、重复s5-4、s5-5直至|g3|<ε,|g3|为g3绝对值,ε为小正数,得到线性化点和不断迭代,插值点逐渐靠近极限状态曲面,从而求得精度较高的线性化点。
22、进一步地,所述步骤s5中,更新ki值:分别计算其中,δ0∈0.001~0.1,ki取当前ki,ki+,ki-中的最小值。这种方式ki值取值,可以使得在该线性点可以在该方向以二阶精度近似原极限状态函数,较小ki更靠近最可能失效点,对结构失效的贡献也较大。
23、进一步地,所述步骤s5中若i<n-1,i=i+1,重复步骤s5-2~s5-6。直到第i=n-1停止,确保最终一共找到2(n-1)线性化点,用2(n-1)个超平面确定的失效域的交集近似原非线性极限状态函数确定的失效域。
24、进一步地,所述步骤s5中,ki+=ki-=ki,分别沿第i=1、2、…、n-1,重复步骤s5-2~s5-5,得到最后2(n-1)个线性化点和上面步骤得到最优ki值下,找到最终的2(n-1)线性化点。
25、进一步地,所述步骤s8中对不确定域s3内的每个联合焦元进行极值分析,确定不确定域s3内的可信度bel(s3)与似真度pl(s3),初始值bel(s3)=0、pl(s3)=0,后续各个焦元的可信度和似真度不断累加。
26、进一步地,所述步骤s8中计算取值范围最小的焦元以2n-1个近似超平面作为极限状态函数时的极大值评估多段近似超平面在面临最不利情况下的极限,为不确定域的可靠度和似真度的计算做准备。
27、进一步地,所述步骤s8中计算不确定域中第p个联合焦元axp的极大值和极小值。对联合焦元进行极值分析,判断出不确定域中每个联合焦元的假设和在每个联合焦元axp上的极大值分别为g_max、gi+_max、gi-_max,极小值分别为g_min、gi+_min、gi-_min,它们分别构成极大值集合gmax和极小值集合gmin;极大值集合和极小值集合的特征决定了可靠度和似真度的计算方法上的不同。
28、进一步地,所述步骤s8中假设gmaxr表示集合gmax的最大值,gminr表示集合gmin的最大值。这两个极值的符号决定了可靠度和似真度的计算方法上的不同。即:
29、
30、假设gmaxl表示集合gmax的最小值,gminl表示集合gmin的最小值,即:
31、
32、其中max{}和min{}表示极大值和极小值;
33、进一步地,所述步骤s8中对于不确定域内第p个联合焦元axp的可靠度和似真度进行计算:
34、(1)若且联合焦元axp的则pl(s3)=pl(s3)+m(axp);若且联合焦元axp的则bel(s3)=bel(s3)+m(axp);对极限状态曲面左侧为正的情况以及根据极值符号判断不确定域焦元的可靠度和似真度是否计入总的可靠度和似真度。
35、(2)若且联合焦元axp的则bel(s3)=bel(s3)+m(axp);若且联合焦元axp的则pl(s3)=pl(s3)+m(axp)。对极限状态曲面左侧为负的情况以及根据极值符号判断不确定域焦元的可靠度和似真度是否计入总的可靠度和似真度。
36、本发明的第二个目的在于公开一种的基于证据理论和多点线性化的结构可靠性分析装置,所述可靠性分析装置包括:
37、信息构建模块,指定待分析领域中反映结构或产品的正常工作能力或安全工作临界状态的极限状态函数g(x),其中,x=[x1,x2,…,xi,...,xn],xi为第i维不确定证据变量,n为问题维数,根据工程经验或权威专家信息,构建不确定证据变量xi的识别框架、单个变量xi基本可信度分配函数mi(xi)、联合焦元ax和联合基本可信度分配函数
38、等效关系模块,根据等概率变换,建立不确定证据变量xi与不确定证据变量xi对应的标准正态分布变量yi之间的等效关系:xi=(φ(yi)-mi(ai,1)-…-mi(ai,j-1))×(ui,j-li,j)/mi(ai,j)+li,j,其中,φ(yi)是标准正态分布yi的累积概率分布函数,ai,j是不确定证据变量xi的第j个焦元,mi(ai,j)是ai,j的基本可信度分配函数,焦元ai,j=[li,j,ui,j],j=1,2,…,li,j和ui,j分别对应焦元ai,j的下界和上界;
39、空间转换模块,根据一次二阶矩方法求得到最可能失效点y*、可靠度指标β和最可能失效点y*处的单位向量αy,将y*按等概率变换转换到原证据空间得到原始空间的最可能失效点x*;
40、正交化模块,采用正交化方法,以αy构造一个正交矩阵r,正交矩阵r的第n列为单位向量αy,通过旋转变换y'=ry将标准正态空间中的变量y变换到旋转标准正态空间的变量y';
41、线性点确定模块,在旋转标准正态空间中分别沿第i=1、2、…、n-1找线性点,其中每个维度都可确定极限状态面上2个线性化点y′i+和y′i-,从而找到2(n-1)个线性化点,将旋转标准正态空间中线性化点y'i+和y'i-转换到原始证据空间中线性化点x'i+和x'i-;
42、泰勒展开模块,在证据空间中,在最可能失效点x*和2(n-1)个线性化点x'i+和x'i-,使用一阶泰勒展开式近似真实极限状态函数g(x),得到2n-1个近似超平面:
43、
44、
45、
46、其中,符号表示求函数的梯度;
47、域划分模块,划分焦元所属绝对失效域、绝对安全域和不确定域,划分规则如下:若第p个联合焦元axp中心点cp与超平面和的距离大于焦元半径,且则该焦元属于失效域s1;若第p个联合焦元ax中心点cp与超平面和的距离大于焦元半径,且和则该焦元属于安全域s2;其余情况焦元皆属于不确定域s3;
48、极值分析模块,对不确定域s3内的每个联合焦元进行极值分析,确定不确定域s3内的可信度bel(s3)与似真度pl(s3);
49、可靠性计算模块,计算结构的可信度与似真度:结构的可信度bel(g)与似真度pl(g)由安全域和不确定域的可信度与似真度相加:bel(g)=bel(s2)+bel(s3)、pl(g)=pl(s2)+pl(s3),其中,安全域s2的可信度和似真度
50、本发明的第三个目的在于提供一种计算机设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现上述基于证据理论和多点线性化的结构可靠性分析方法。
51、本发明的第四个目的在于一种存储介质,存储有程序,所述程序被处理器执行时,实现上述基于证据理论和多点线性化的结构可靠性分析方法。
52、本发明相对于现有技术具有如下的优点及效果:
53、(1)一阶近似可靠性方法仅在最可能失效点上进行一阶泰勒展开线性近似原极限状态函数,无法精确处理高度非线性的失效面,且易导致近似误差。二阶近似可靠性方法通过在最可能失效点二阶泰勒展开提供更高精度,但其计算复杂度和时间消耗较大。相比之下,本发明方法通过选择极限状态函数上多个线性化点并在线性化点上进行线性展开,做到更全面地近似原极限状态函数,从而结果更精确且计算方便,计算精度可能超过二阶近似可靠性方法。可见,本发明方法可能在精度和效率间提供了较好的平衡。
54、(2)在证据理论中,对所有联合焦元都一一进行极值分析,计算量会随证据变量个数和区间的增加呈指爆炸式增长,成本过高。本发明根据每个联合焦元的中心点相对超平面的位置和距离,划分到失效域、安全域和不确定域。仅需要对不确定域的联合焦元进行极值分析,显著减少需进行极值计算的联合焦元数量,从而提高整个分析过程的效率。
55、(3)本发明提出根据极限状态函数斜率的变化程度,再最终确定极限状态函数上合适的线性点。与遍历找尽极限状态上所有线性化点后再排除相关系数高的超平面的这一系列步骤相比,本发明方法提出的寻找过程更为快速合理。
- 还没有人留言评论。精彩留言会获得点赞!