基于人工智能的润滑油杂质污染检测方法、装置与流程
本技术涉及图像处理,尤其涉及一种基于人工智能的润滑油杂质污染检测方法、装置。
背景技术:
1、润滑油主要起润滑、辅助冷却、防锈、清洁、密封和缓冲等作用,广泛应用在在汽车、机械设备等多个领域,是保护机械及加工件的液体或半固体润滑剂。润滑油在生产过程中可能会掺杂杂质,例如泥砂、尘土、铁屑、纤维和某些不溶性盐类等。若润滑油中存在杂质,一方面,杂质会破坏润滑油的油膜降低润滑油性能,另一方面,杂质会严重影响用油设备的性能,加快机械磨损,堵塞过滤器,生成过多积炭等。为了确保用油设备的安全性、稳定性,需保障润滑油油质的合格,因此在生产过程中需要对润滑油的品质进行检测,避免润滑油中掺杂有杂质。
2、在现有技术中,对润滑油的杂质检测采用机器视觉的方法,通过采集润滑油的图像,然后对获得的图像进行增强,凸出润滑油中的杂质,从而实现对杂质的检测。但是因为图像是在润滑油的生产线上实时采集获得,受到采集环境的影响,获得的图像会受到噪声的干扰,在进行杂质识别时会将噪声像素点当做杂质识别出来,导致检测的结果不准确,降低了润滑油的实际品质。而传统的去噪算法是根据局部范围内的像素点对中心像素点进行填补,会造成图像平滑。因此亟需一种能够将图像中的杂质和噪音进行准确识别、区分和排除的方法,从而使得检测到的杂质区域更加的准确。
技术实现思路
1、本技术提供了一种基于人工智能的润滑油杂质污染检测方法、装置,以使得对润滑油杂质污染检测时可以实现对杂质的精准检测识别。
2、根据本技术实施例的第一方面,提供了一种基于人工智能的润滑油杂质污染检测方法,所述方法包括:
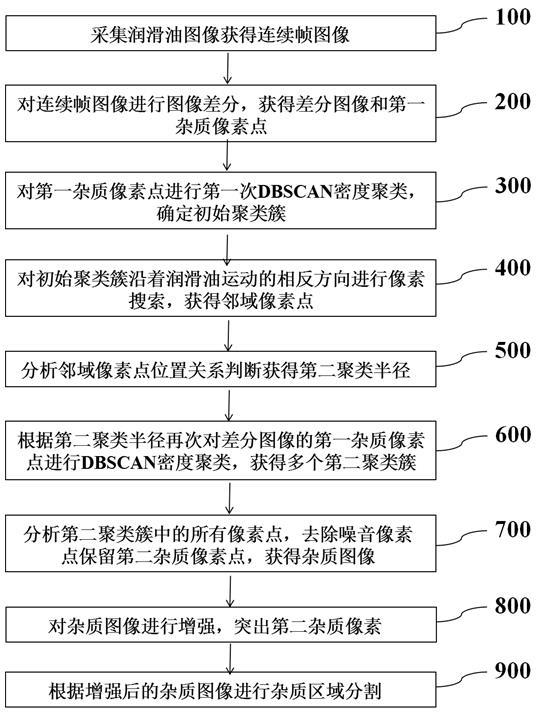
3、采集润滑油图像获得连续帧图像;
4、对所述连续帧图像进行图像差分,获得差分图像和第一杂质像素点;
5、对第一杂质像素点进行第一次dbscan密度聚类,确定初始聚类簇;
6、对初始聚类簇沿着润滑油运动的相反方向进行像素搜索,获得邻域像素点;
7、分析所述邻域像素点位置关系判断获得第二聚类半径;
8、根据所述第二聚类半径再次对差分图像的第一杂质像素点进行dbscan密度聚类,获得多个第二聚类簇;
9、分析所述第二聚类簇中的所有像素点,去除噪音像素点保留第二杂质像素点,获得杂质图像。
10、在本发明的一些实施例中,所述方法还包括:
11、对所述杂质图像进行增强,突出所述第二杂质像素点;
12、根据增强后的所述杂质图像进行杂质区域分割。
13、在本发明的一些实施例中,对所述连续帧图像进行图像差分,获得差分图像和第一杂质像素点,包括:
14、将当前帧图像与下一帧图像进行差分,获得帧图像与帧图像的差分图像;
15、再将帧图像与下一帧图像进行差分,获得帧图像与帧图像的差分图像;
16、对差分后的每个像素点打标签;
17、根据差分后的图像计算杂质像素点的可能程度,计算公式:
18、;
19、式中,表示第个像素点为杂质像素点的可能程度,表示在标记像素点中第个像素点在第一次差分后的横坐标,表示在标记像素点中第个像素点在第二次差分后的横坐标,表示在标记像素点中第个像素点在第一次差分后的纵坐标,表示在标记像素点中第个像素点在第二次差分后的纵坐标,表示归一化函数,其归一化的值为;
20、判断是否大于第一预设阈值,如果是,表示第个像素点为第一杂质像素点。
21、在本发明的一些实施例中,对第一杂质像素点进行第一次dbscan密度聚类,确定初始聚类簇,包括:
22、选取第一杂质像素点中任一像素点,对其进行密度聚类,设置第一聚类半径和第一最小聚类数,所述第一聚类半径和第一最小聚类数为经验阈值,获得多个第一聚类簇;
23、计算第一聚类簇为初始聚类簇的可能值,其计算公式如下:
24、;
25、式中,表示第个聚类簇为初始聚类簇的可能值,表示该聚类簇中像素点的数量,表示第个聚类簇中任一两个像素点之间的欧式距离,表示该聚类簇中所有像素点之间的距离和,除以表示其平均距离;
26、判断是否大于第二预设阈值,如果是,将该第一聚类簇作为初始聚类簇。
27、在本发明的一些实施例中,对初始聚类簇沿着润滑油运动的相反方向进行像素搜索,获得邻域像素点,包括:
28、基于润滑油中杂质运动模型对初始聚类簇中的疑似杂质像素点进行分析,获得杂质的运动方向;
29、将杂质的运动方向进行层次聚类,多次迭代直至获得预设的3个迭代聚类簇;
30、分别对3个迭代聚类簇进行主成分分析,获得3个迭代聚类簇的主成分方向;
31、沿着3个主成分方向的反方向进行像素搜索,找寻满足该方向上的像素点,获得邻域像素点。
32、在本发明的一些实施例中,基于润滑油中杂质运动模型对初始聚类簇中的疑似杂质像素点进行分析,获得杂质的运动方向,包括:
33、将润滑油的运动方向选定作为主方向;
34、计算初始聚类簇中两两像素点之间的方向与主方向的差值,其计算公式为,其中表示第个连接方向与主方向的差值,表示第个连接方向,表示主方向;
35、判断是否大于第三预设阈值,如果是,将该方向剔除,获得杂质的运动方向。
36、在本发明的一些实施例中,分析所述邻域像素点位置关系判断获得第二聚类半径,包括:
37、根据邻域像素点之间的位置关系判断初始聚类簇的延伸方向上第点为该聚类簇的点的可能程度,其计算公式如下:
38、;
39、式中,表示第个初始聚类簇的延伸方向上第点为该聚类簇的点的可能程度,表示第个像素点到任意主成分方向的最小距离,表示该点距离初始聚类簇的中第个像素点的最小距离;
40、判断是否小于第四预设阈值,如果是,判断该点为第二聚类簇内的像素点;
41、根据初始聚类簇中像素点及包含延伸像素点的位置关系来确定第二聚类半径,其计算公式如下:
42、;
43、式中,表示第二聚类半径,表示在获得的初始聚类簇及包含延伸点的局部范围内任意两个像素点之间的距离。
44、在本发明的一些实施例中,分析所述第二聚类簇中的所有像素点,去除噪音像素点保留第二杂质像素点,获得杂质图像,包括:
45、选择5张连续帧图像,相邻连续帧图像进行图像差分和像素点标记,然后获得每一个标记像素点的运动轨迹,根据运动轨迹的变化来获得杂质像素点的置信度,其计算公式如下:
46、;
47、式中,表示第个第二聚类簇中第个像素点为杂质像素点的置信度,表示第个标记像素点在第帧差分图像中的运动方向,表示杂质运动模型中的任意主成分方向,表示在第个标记像素点在第帧差分图像中于主成分方向的差值,表示差值的最小值,因为会存在三个运动方向,因此这里选取差值的最小值才能够找最符合杂质运动轨迹的方向,3表示五张图像有四张差分图像,存在三个运动方向;
48、判断是否小于第五预设阈值,如果是,保留该像素点为第二杂质像素点;否则,去除该像素点,获得杂质图像。
49、在本发明的一些实施例中,对所述杂质图像使用分段线性增强算法进行增强。
50、根据本技术实施例的第二方面,提供了一种基于人工智能的润滑油杂质污染检测装置,该装置包括处理器和存储器,其中:
51、所述存储器,用于存储程序代码;
52、所述处理器,用于读取所述存储器中存储的程序代码,并执行如本技术实施例第一方面所述的方法。
53、由以上实施例可见,本技术实施例提供的基于人工智能的润滑油杂质污染检测方法、装置,具有的有益效果如下:
54、本发明基于杂质在润滑油中的运动特点,建立杂质运动模型,根据杂质在运动过程的变化将其与噪声像素点进行区分,能够准确的识别到哪些像素点为杂质像素点,哪些像素点为噪声像素点,从而去除噪声像素点,准确的识别出杂质。
55、本发明通过密度聚类算法来进行区域分割,并且根据杂质在运动过程中的运动轨迹来确定合适的聚类半径,使得获得的聚类簇能够准确的分割出局部杂质区域,避免了将无关像素点分割在杂质区域内,进而在对分割区域进行分析时能够准确的反映杂质的分布。
56、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!